SLAM:ORB-SLAM 位姿优化描述
只知道算法描述和代码,而不知道原理是比较扯的事情,还是把原理转载一下。
原文链接: http://www.cnblogs.com/luyb/p/5447497.html
ORB-SLAM作为单目SLAM,其精度很大程度上决定于帧与帧之间的位姿优化的是否准确。因此优化(optimization)在ORB-SLAM里面扮演了很重要的角色。这一小节探讨一下ORB-SLAM里用到的优化。
ORB-SLAM选用g2o作为图优化的方法,关于g2o可以参考http://www.cnblogs.com/gaoxiang12/p/5304272.html。
一、为什么要优化
因为摄像机标定(camera calibration)和追踪(tracking)的精度不够。摄像机标定的误差会体现在重建中(比如三角法重建时),而追踪的误差则会体现在不同关键帧之间的位姿中,和重建中(单目)。误差的不断累积会导致后面帧的位姿离实际位姿越来越远,最终会限制系统整体的精度。
1.1 摄像机标定
单目SLAM文献中一般假设摄像机标定的结果是准确的,并不考虑这个因素带来的误差(大概因为很多时候跑标准的数据集,认为摄像机标定的误差是相似的)。然而对于一个产品,不同类型的传感器对应的标定误差并不相同,甚至有可能差异很大。因此,如果要评估整个系统的精度,这方面的误差必须要考虑进去。
1.2 追踪
无论在单目、双目还是RGBD中,追踪得到的位姿都是有误差的。单目SLAM中,如果两帧之间有足够的对应点,那么既可以直接得到两帧之间的位姿(像初始化中那样),也可以通过求解一个优化问题得到(如solvePnP)。由于单目中尺度的不确定性,还会引入尺度的误差。由于tracking得到的总是相对位姿,前面某一帧的误差会一直传递到后面去,导致tracking到最后位姿误差有可能非常大。为了提高tracking的精度,可以1. 在局部和全局优化位姿;2. 利用闭环检测(loop closure)来优化位姿。
二、如何优化
2.1 优化的目标函数在SLAM问题中,常见的几种约束条件为:
1. 三维点到二维特征的映射关系(通过投影矩阵);
2. 位姿和位姿之间的变换关系(通过三维刚体变换);
3. 二维特征到二维特征的匹配关系(通过F矩阵);
4. 4呢?
5. 其它关系(比如单目中有相似变换关系)。如果我们能够知道其中的某些关系是准确的,那么可以在g2o中定义这样的关系及其对应的残差,通过不断迭代优化位姿来逐步减小残差和,从而达到优化位姿的目标。
2.2 局部优化
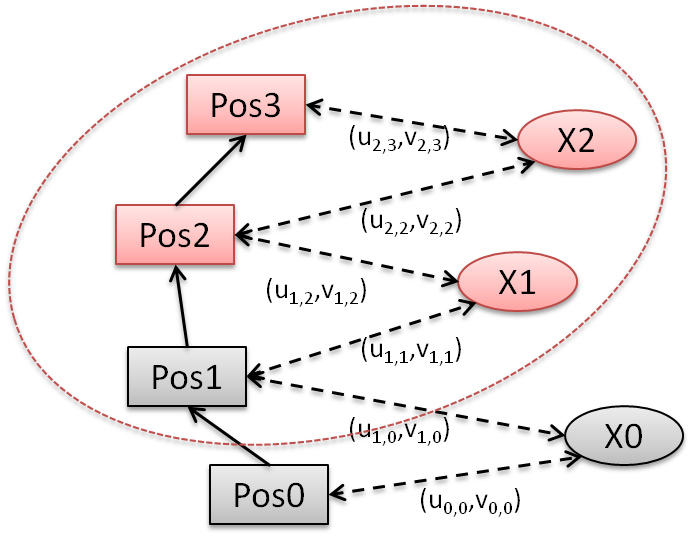
当新的关键帧加入到convisibility graph时,作者在关键帧附近进行一次局部优化,如下图所示。Pos3是新加入的关键帧,其初始估计位姿已经得到。此时,Pos2是和Pos3相连的关键帧,X2是Pos3看到的三维点,X1是Pos2看到的三维点,这些都属于局部信息,共同参与Bundle Adjustment。同时,Pos1也可以看到X1,但它和Pos3没有直接的联系,属于Pos3关联的局部信息,参与Bundle Adjustment,但取值保持不变。Pos0和X0不参与Bundle
Adjustment。
因此,参与优化的是下图中红色椭圆圈出的部分,其中红色代表取值会被优化,灰色代表取值保持不变。(u,v)是X在Pos下的二维投影点,即X在Pos下的测量(measurement)。优化的目标是让投影误差最小。
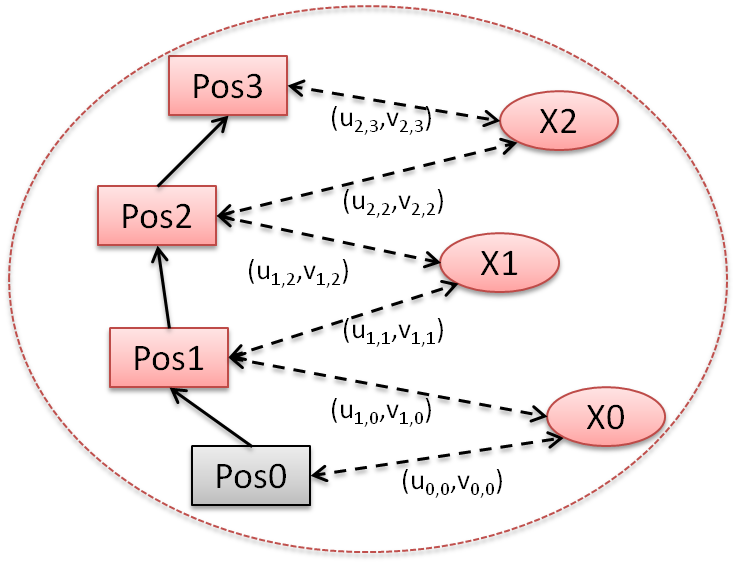
2.3 全局优化
在全局优化中,所有的关键帧(除了第一帧)和三维点都参与优化。
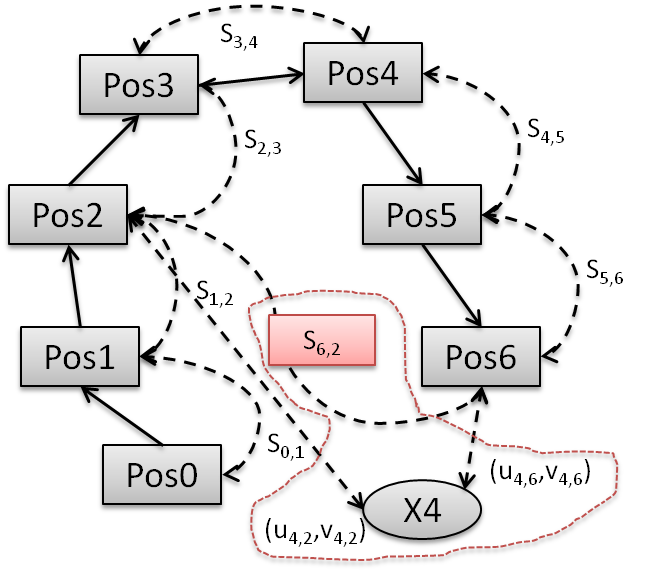
2.4 闭环处的Sim3位姿优化
当检测到闭环时,闭环连接的两个关键帧的位姿需要通过Sim3优化(以使得其尺度一致)。优化求解两帧之间的相似变换矩阵,使得二维对应点(feature)的投影误差最小。
如下图所示,Pos6和Pos2为一个可能的闭环。通过(u 4,2 ,v 4,2 ) (u4,2,v4,2)和(u 4,6 ,v 4,6 ) (u4,6,v4,6)之间的投影误差来优化S 6,2 S6,2。
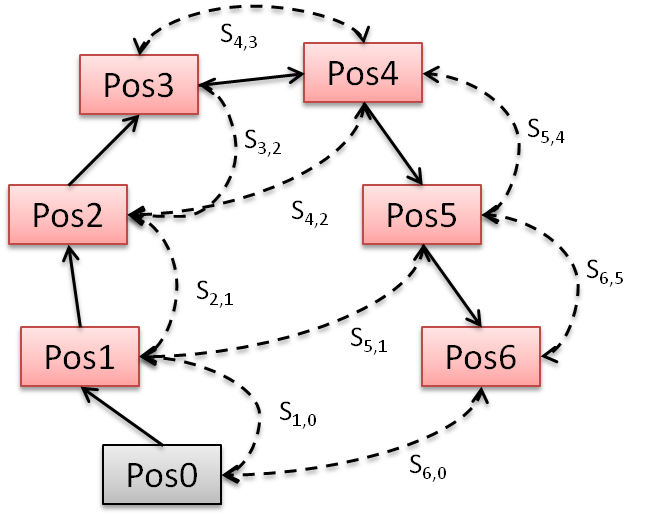
2.5 Sim3上的位姿优化
单目SLAM一般都会发生尺度(scale)漂移,因此Sim3上的优化是必要的。相对于SE3,Sim3的自由度要多一个,而且优化的目标是矫正尺度因子,因此优化并没有加入更多的变量(如三维点)。
作者在检测到闭环时在Sim3上对所有的位姿进行一次优化。定义Sim3上的残差如下:
e i,j =log Sim3 (S ij S jw S −1 iw ) ei,j=logSim3(SijSjwSiw−1)
其中S iw Siw的初值是尺度为1的Pos
i相对于世界坐标系的变换矩阵。S i,j Si,j为Pos
i和Pos j之间的(Sim3优化之前的)相对位姿矩阵,表示S iw Siw和S jw Sjw之间的测量(measurement)。此处相当于认为局部的相对位姿是准确的,而全局位姿有累计误差,是不准确的。
三、小结
个人理解,单目SLAM中的优化需要更多技巧,要有明确的优化目标,要仔细权衡其中的参数选择、自由度、速度和稳定性。
该系列的其它文章:
SLAM:ORB-SLAM 位姿优化描述的更多相关文章
- 从零开始一起学习SLAM | 学习SLAM到底需要学什么?
SLAM涉及的知识面很广,我简单总结了 “SLAM知识树” 如下所示: (公众号菜单栏回复 “树” 可获得清晰版) 可以看到涉及的知识面还是比较广的.这里放出一张SLAM圈子里喜闻乐见的表达悲喜交加心 ...
- [SLAM]Karto SLAM算法学习(草稿)
Karto_slam算法是一个Graph based SLAM算法.包括前端和后端.关于代码要分成两块内容来看. 一类是OpenKarto项目,是最初的开源代码,包括算法的核心内容: https:// ...
- SLAM: 单目视觉SLAM的方案分类《机器人手册》
摘抄知乎上一段有趣的话: 如果你出门问别人『学习SLAM需要哪些基础?』之类的问题,一定会有很热心的大哥大姐过来摸摸你的头,肩或者腰(不重要),一脸神秘地从怀里拿出一本比馒头还厚的<Mu ...
- SLAM初探-SLAM for Dummies
SLAM综述性特别是原理讲述比较浅显易懂的的资料比较少,相对比较知名的是<SLAM for Dummies>,但中文资料相对较少,这里就简单概述一下<SLAM for Dummies ...
- [SLAM] GMapping SLAM源码阅读(草稿)
目前可以从很多地方得到RBPF的代码,主要看的是Cyrill Stachniss的代码,据此进行理解. Author:Giorgio Grisetti; Cyrill Stachniss http: ...
- PL-SVO公式推导及代码解析:位姿优化
通过跳过极线约束单独优化图像中每个特征的位置后,必须通过最小化3D特征与图像中相应的2D特征位置之间的重投影误差来进一步细化(3)中获得的相机姿态( 见图5).为此,我们考虑在世界坐标系中3D特征和相 ...
- 从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
首发于公众号:计算机视觉life 旗下知识星球「从零开始学习SLAM」 这可能是最清晰讲解g2o代码框架的文章 理解图优化,一步步带你看懂g2o框架 小白:师兄师兄,最近我在看SLAM的优化算法,有种 ...
- 第六篇 视觉slam中的优化问题梳理及雅克比推导
优化问题定义以及求解 通用定义 解决问题的开始一定是定义清楚问题.这里引用g2o的定义. \[ \begin{aligned} \mathbf{F}(\mathbf{x})&=\sum_{k\ ...
- SLAM图优化g2o
SLAM图优化g2o 图优化g2o框架 图优化的英文是 graph optimization 或者 graph-based optimization, "图"其实是数据结构中的gr ...
随机推荐
- APK动态加载框架 https://github.com/singwhatiwanna/dynamic-load-apk
https://github.com/singwhatiwanna/dynamic-load-apk
- seleniumd对象的操作方法,属性,keys
这是通过find方法找到的页面元素,此对象提供了多种方法,让我们可以与页面元素进行交互,例如点击.清空. 目录: 1. 方法 2. 属性 3. keys 方法 clear()清空 如果当前元素中有文本 ...
- Mysql学习总结(41)——MySql数据库基本语句再体会
1.数据定义语言(DDL):定义和管理数据对象,比如建立数据库.数据表 数据操作语言(DML):用于操作数据库对象中的包含的数据. 数据查询语言(DQL):用于查询数据库对象中包含的数据,能够对表进行 ...
- 暑假集训D16总结
考试 日常爆炸= = T1 一看就是个树规,然而不会写方程= = T2 一看就是个分块,然而不会分= = T3 终于有点头绪,推了两个小时的30分部分分情况,然后打挂了= = 我玩个鬼啊 其实听完,觉 ...
- HDU 5393
[background] 保研的事终于告一段落了,之后去北京折腾了一段时间,本以为会在那里实习一个月,谁知道刚去ICT,心中就各种反感,可能是因为LP的态度吧,否则我可能会留在那里读研也说不定.花了两 ...
- [csdn markdown]使用摘记一源码高亮及图片上传和链接
本文主要内容是体验csdn markdown的代码块高亮显示和图片链接及上传. 图片上传 上边这是标题行.仅仅须要使用一个#就能够表示.几个表示是几级标题 图片上传 本地图片上传控件 本地图片上传方式 ...
- 【POJ 2983】Is the Information Reliable?(差分约束系统)
id=2983">[POJ 2983]Is the Information Reliable? (差分约束系统) Is the Information Reliable? Time L ...
- 一步步玩pcDuino3--mmc下的bootloader
pcDuino3下支持mmc启动.官方的Uboot是採用SPL框架实现的,由于内部的SRAM空间达到32K,我们全然能够在这32K空间内编写一个完整可用小巧的bootloader来完毕引导Linux ...
- linux驱动注册汇总
--- 01)TP file_operations: { 1. static struct file_operations tpd_fops = { // .owner = THIS_MODULE, ...
- 辨异 —— Java 中 String 的相等性比较
How do I compare strings in Java? 1. 语法知识 ==:判断的是引用的相等性(reference equality),也即是否为同一对象: .equals():判断的 ...