SLAM+语音机器人DIY系列:(五)树莓派3开发环境搭建——1.安装系统ubuntu_mate_16.04
摘要
通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容:
1.安装系统ubuntu_mate_16.04
安装前先准备好需要用到的材料,在树莓派3上安装ubuntu_mate_16.04需要用到的工具和材料,如图1。
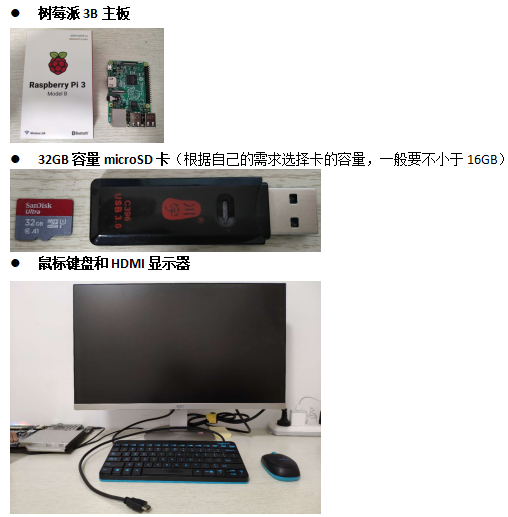
(图1)材料准备
1.1.格式化microSD卡
在向microSD卡烧入系统之前,需要先格式化好microSD卡。我这里使用DiskGenius工具将卡格式化为FAT32文件系统。DiskGenius下载地址:
http://www.diskgenius.cn/download.php
1.2.下载ubuntu-mate-16.04系统镜像
直接前往ubuntu-mate的官网https://ubuntu-mate.org/download/。选择如图2所示的版本进行下载就行了。

(图2)ubuntu-mate-16.04下载页面
1.3.系统烧录
将下载好的系统镜像文件ubuntu-mate-16.04.2-desktop-armhf-raspberry-pi.img.xz解压得到ubuntu-mate-16.04.2-desktop-armhf-raspberry-pi.img,该文件应存放在英文路径下。然后用Win32 Disk Imager工具将ubuntu-mate-16.04.2-desktop-armhf-raspberry-pi.img烧录到microSD卡,Win32 Disk Imager工具下载地址https://win32-disk-imager.en.lo4d.com/download。烧录过程很简单,打开Win32 Disk Imager工具,在[映像文件]栏中填入待烧录的镜像文件路径,在[设备]栏中填入要烧录的microSD卡,最后点击[写入]等待烧录进度完成就行了,如图3。

(图3)系统烧录
1.4.上电开机
给树莓派3主板连接上HDMI显示器、鼠标、键盘,并插入刚刚烧录好系统的microSD卡,就可以上电了,如图4。

(图4)上电开机
第一次开机,系统需要用户填写一些必要的设置项,首先是系统语言设置,选择默认的语言English就行了,如图5。

(图5)语言设置
然后是wifi连接设置,这里选择先不联网,这样系统配置速度会快很多,等后面我们再进行联网,如图6。

(图6)wifi连接设置
然后是时区设置,我们在中国,说以用鼠标点击地图中的中国区域,会自动锁定到Shanghai时区,如图7。

(图7)时区设置
然后是键盘设置,直接默认就行了,如图8。
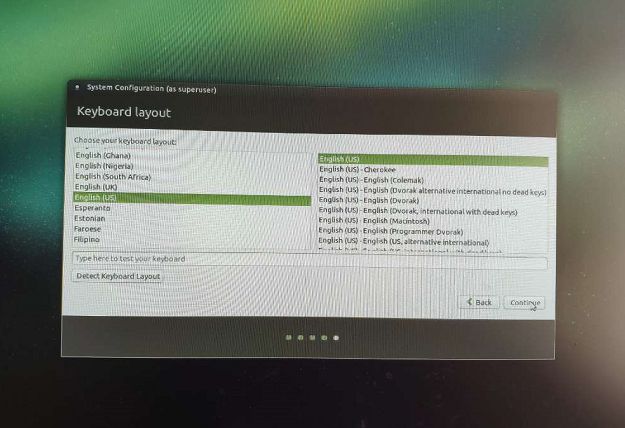
(图8)键盘设置
然后是用户名和密码设置,为了方便记忆,我将用户名和密码都设置成了ubuntu;这里需要特别注意,由于我们的系统用于机器人的开发,为了让机器人上电就能自动进入系统,我们需要勾选[Log in automatically]选项,也就是让系统开机自动登录。如图9。

(图9)用户名、密码、开机自动登录设置
然后就进入系统配置过程了,耐心等待配置进度条完成,如图10。
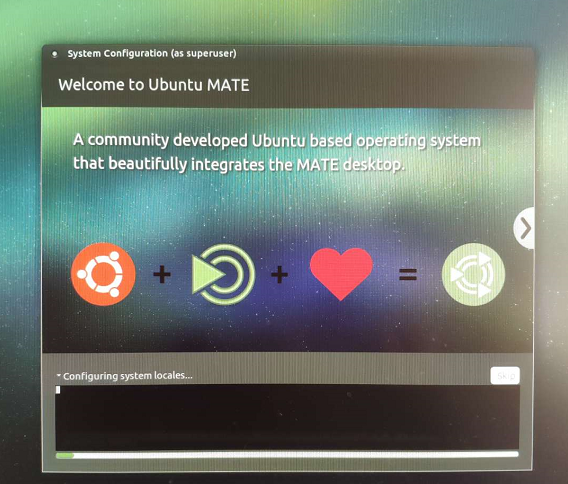
(图10)系统配置过程
耐心等待,所有配置完成后,系统会自动重启一次,重启完成后,就可以看到ubuntu-mate-16.04系统的真容了,如图11。如果我们不想每次开机都看到这个欢迎界面,可以去掉勾选框中的勾,关闭就行了,下次就不会出现了。

(图11)欢迎界面
最后,就可以见到ubuntu-mate-16.04系统的真容了,如图12,到这里系统安装就成功了。

(图12)ubuntu-mate-16.04系统桌面
后记
------SLAM+语音机器人DIY系列【目录】快速导览------
第1章:Linux基础
第2章:ROS入门
第3章:感知与大脑
第4章:差分底盘设计
第5章:树莓派3开发环境搭建
第6章:SLAM建图与自主避障导航
2.google-cartographer机器人SLAM建图
第7章:语音交互与自然语言处理
第8章:高阶拓展
2.centos7下部署Django(nginx+uwsgi+django+python3)
----------------文章将持续更新,敬请关注-----------------
如果大家对博文的相关类容感兴趣,或有什么技术疑问,欢迎加入下面的《SLAM+语音机器人DIY》QQ技术交流群,一起讨论学习^_^

SLAM+语音机器人DIY系列:(五)树莓派3开发环境搭建——1.安装系统ubuntu_mate_16.04的更多相关文章
- SLAM+语音机器人DIY系列:(一)Linux基础——2.安装Linux发行版ubuntu系统
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- SLAM+语音机器人DIY系列:(二)ROS入门——2.ROS系统整体架构
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——6.做一个能走路和对话的机器人
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- SLAM+语音机器人DIY系列:(一)Linux基础——1.Linux简介
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- SLAM+语音机器人DIY系列:(一)Linux基础——3.Linux命令行基础操作
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- SLAM+语音机器人DIY系列:(二)ROS入门——1.ROS是什么
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——4.如何编写ROS的第一个程序hello_world
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
随机推荐
- 卸载重装Mysql
卸载重装前请备份数据库 卸载 sudo apt autoremove --purge mysql-server-core-5.7 清理残留 sudo rm -r /var/lib/mysql* sud ...
- 单片机开发——03工欲善其事必先利其器(AD软件安装破解)
在单片机开发中,有了Keil的程序编程,Protues的模拟仿真,那么问题来了,怎么去进行电路图设计以及硬件调试呢?此刻就必须引入本文的Altium Designer (下文简称AD)安装与破解.在硬 ...
- msql索引
从网上找了两种解决方案: 最近要给一个表加一个联合唯一索引,但是表中的两个联合健有重复值,导致无法创建: 解决方案一:ignore(会删除重复的记录(重复记录只保留一条,其他的删除),然后建立唯一索引 ...
- 注解(Annotation)自定义注解入门
摘自:http://www.cnblogs.com/peida/archive/2013/04/24/3036689.html 元注解: 元注解的作用就是负责注解其他注解.Java5.0定义了4个标准 ...
- Struts2中数据封装方式
一.通过ActionContext类获取 public class ActionContextDemo extends ActionSupport { @Override public S ...
- Jacob工具类使用文件互转服务 word转html html转excel word转pdf excel转pdf ppt转pdf
前提条件 必须安装MS office 1.jdk使用jdk1.8 2.jacob.dll放在..\jdk1.8\jre\bin目录下 3.eclipse的jre版本要和jdk一致,window-&g ...
- 在webpack里使用jquery.mCustomScrollbar插件
malihu-custom-scrollbar-plugin是一个依赖jquery的自定义网页滚动条样式插件 网站:http://manos.malihu.gr/jquery-custom-conte ...
- ROC曲线的计算
1.ROC曲线简介 在评价分类模型时,会用到ROC(receiver operating characteristic)曲线.ROC曲线可用来评价二元分类器( binary classifier)的优 ...
- jquery的$.extend和$.fn.extend作用及区别/用span实现进度条/腾讯云IIS端口号修改
jQuery为开发插件提拱了两个方法,分别是: jQuery.fn.extend(); jQuery.extend(); 虽然 javascript 没有明确的类的概念,但是用类来理解它,会更方便. ...
- 2. 网友对app后端写作系列文章的写作建议
很感谢"app后端"qq群的网友,在发布消息后,就收到了大量网友的反馈 下面的建议会融入到写作当中: 1.还有,对版本升级很感兴趣,我们现在为了兼容旧版本,已经把工程代码搞的乱哄哄 ...