SLAM+语音机器人DIY系列:(五)树莓派3开发环境搭建——1.安装系统ubuntu_mate_16.04
摘要
通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容:
1.安装系统ubuntu_mate_16.04
安装前先准备好需要用到的材料,在树莓派3上安装ubuntu_mate_16.04需要用到的工具和材料,如图1。
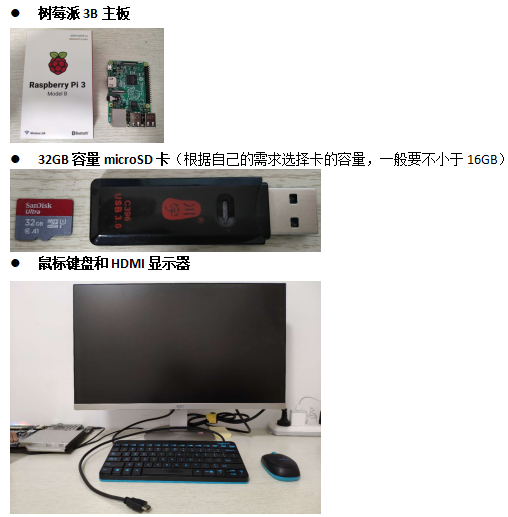
(图1)材料准备
1.1.格式化microSD卡
在向microSD卡烧入系统之前,需要先格式化好microSD卡。我这里使用DiskGenius工具将卡格式化为FAT32文件系统。DiskGenius下载地址:
http://www.diskgenius.cn/download.php
1.2.下载ubuntu-mate-16.04系统镜像
直接前往ubuntu-mate的官网https://ubuntu-mate.org/download/。选择如图2所示的版本进行下载就行了。

(图2)ubuntu-mate-16.04下载页面
1.3.系统烧录
将下载好的系统镜像文件ubuntu-mate-16.04.2-desktop-armhf-raspberry-pi.img.xz解压得到ubuntu-mate-16.04.2-desktop-armhf-raspberry-pi.img,该文件应存放在英文路径下。然后用Win32 Disk Imager工具将ubuntu-mate-16.04.2-desktop-armhf-raspberry-pi.img烧录到microSD卡,Win32 Disk Imager工具下载地址https://win32-disk-imager.en.lo4d.com/download。烧录过程很简单,打开Win32 Disk Imager工具,在[映像文件]栏中填入待烧录的镜像文件路径,在[设备]栏中填入要烧录的microSD卡,最后点击[写入]等待烧录进度完成就行了,如图3。

(图3)系统烧录
1.4.上电开机
给树莓派3主板连接上HDMI显示器、鼠标、键盘,并插入刚刚烧录好系统的microSD卡,就可以上电了,如图4。

(图4)上电开机
第一次开机,系统需要用户填写一些必要的设置项,首先是系统语言设置,选择默认的语言English就行了,如图5。

(图5)语言设置
然后是wifi连接设置,这里选择先不联网,这样系统配置速度会快很多,等后面我们再进行联网,如图6。

(图6)wifi连接设置
然后是时区设置,我们在中国,说以用鼠标点击地图中的中国区域,会自动锁定到Shanghai时区,如图7。

(图7)时区设置
然后是键盘设置,直接默认就行了,如图8。
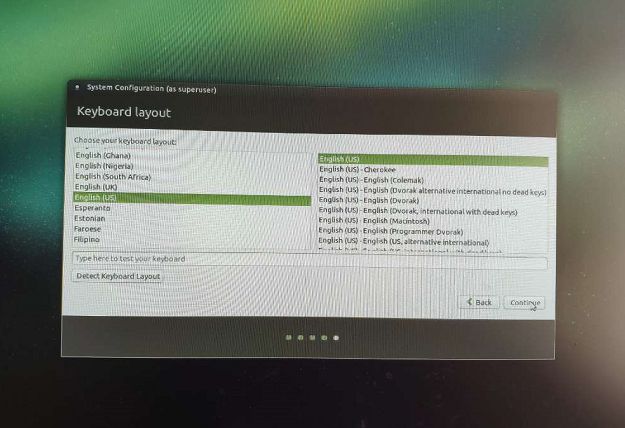
(图8)键盘设置
然后是用户名和密码设置,为了方便记忆,我将用户名和密码都设置成了ubuntu;这里需要特别注意,由于我们的系统用于机器人的开发,为了让机器人上电就能自动进入系统,我们需要勾选[Log in automatically]选项,也就是让系统开机自动登录。如图9。

(图9)用户名、密码、开机自动登录设置
然后就进入系统配置过程了,耐心等待配置进度条完成,如图10。
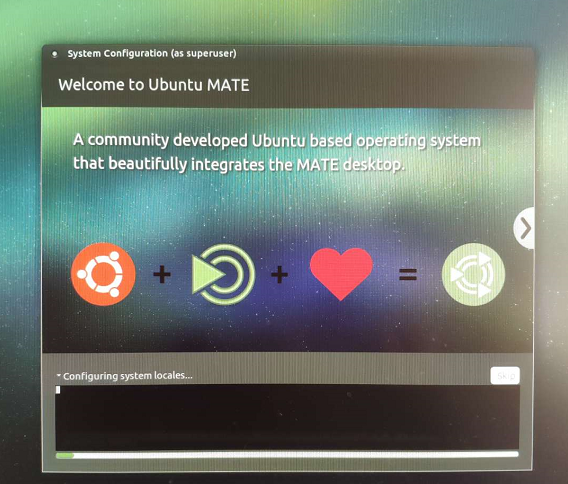
(图10)系统配置过程
耐心等待,所有配置完成后,系统会自动重启一次,重启完成后,就可以看到ubuntu-mate-16.04系统的真容了,如图11。如果我们不想每次开机都看到这个欢迎界面,可以去掉勾选框中的勾,关闭就行了,下次就不会出现了。

(图11)欢迎界面
最后,就可以见到ubuntu-mate-16.04系统的真容了,如图12,到这里系统安装就成功了。

(图12)ubuntu-mate-16.04系统桌面
后记
------SLAM+语音机器人DIY系列【目录】快速导览------
第1章:Linux基础
第2章:ROS入门
第3章:感知与大脑
第4章:差分底盘设计
第5章:树莓派3开发环境搭建
第6章:SLAM建图与自主避障导航
2.google-cartographer机器人SLAM建图
第7章:语音交互与自然语言处理
第8章:高阶拓展
2.centos7下部署Django(nginx+uwsgi+django+python3)
----------------文章将持续更新,敬请关注-----------------
如果大家对博文的相关类容感兴趣,或有什么技术疑问,欢迎加入下面的《SLAM+语音机器人DIY》QQ技术交流群,一起讨论学习^_^

SLAM+语音机器人DIY系列:(五)树莓派3开发环境搭建——1.安装系统ubuntu_mate_16.04的更多相关文章
- SLAM+语音机器人DIY系列:(一)Linux基础——2.安装Linux发行版ubuntu系统
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- SLAM+语音机器人DIY系列:(二)ROS入门——2.ROS系统整体架构
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——6.做一个能走路和对话的机器人
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- SLAM+语音机器人DIY系列:(一)Linux基础——1.Linux简介
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- SLAM+语音机器人DIY系列:(一)Linux基础——3.Linux命令行基础操作
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- SLAM+语音机器人DIY系列:(二)ROS入门——1.ROS是什么
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——4.如何编写ROS的第一个程序hello_world
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
随机推荐
- node传统读取文件和promise,async await,
先上传统文件加载方式代码,传统方式在处理多层嵌套时代码比较混乱 const fs = require('fs') //引入文件系统 function readFile (cb) { fs.readFi ...
- Mac下MySQL无my-default.cnf
转自https://www.jianshu.com/p/628bcf8bb557 As of MySQL 5.7.18, my-default.ini is no longer included in ...
- memset库函数
头文件:#include <string.h> 定义函数:void * memset(void *s, int c, size_t n); 函数说明:memset()会将参数s 所 ...
- 注解(Annotation)自定义注解入门
摘自:http://www.cnblogs.com/peida/archive/2013/04/24/3036689.html 元注解: 元注解的作用就是负责注解其他注解.Java5.0定义了4个标准 ...
- struts2中的拦截器
一 AOP思想: 面向切面编程的思想 AOP为Aspect Oriented Programming的缩写,意为:面向切面编程,通过预编译方式和运行期动态代理实现程序功能的统一维护的一种技术.AOP ...
- mybatis数据源源码剖析(JNDI、POOLED、UNPOOLED)
http://blog.csdn.net/reliveit/article/details/47325189
- HTTP 前端需明白的相关知识点
简介: http(Hyper Text Transfer Protocol)超文本传输协议是万维网应用层的协议,使用了面向连接的TCP作为运输层协议. 特征: 简单快速:通过url就可以访问资源,协议 ...
- 修改WordPress后台默认登陆地址提高网站安全性
作者:荒原之梦 原文链接:http://zhaokaifeng.com/?p=536 安装完WordPress后,默认的登陆地址就是: http://XXX.XXX/wordpress/wp-admi ...
- 基于gtid的复制
Ⅰ.GTID的介绍 global transaction id identifier 全局事务id gtid = server_uuid + transaction_id server_uuid是全局 ...
- 使用box-shadow进行画图(性能优化终结者)
最近突然想做一些好玩的东西,找来找去,想到了之前曾经在网上看到过有人用box-shadow画了一副蒙娜丽莎出来感觉这个挺有意思,正好趁着周末,自己也搞一波 前言 在线地址: 优化前的版本优化后的版本源 ...