基于OpenCV单目相机的快速标定--源码、工程、实现过程
相机的标定是所有人走进视觉世界需要做的第一件事,辣么多的视觉标定原理解释你可以随便在网上找到,这里只讲到底如何去实现,也算是给刚入门的朋友做个简单的分享。
1.单目相机标定的工程源码
首先请到同性交友网站Github上下载工程源码(https://github.com/Zhanggx0102/Camera_Calibration),注意以下几点:
1).这是一个MS Visual Studio 2010的工程源码(版本是201x都可以)。
2).在编译运行之前请先在VS中配置好OpenCV(网上搜索有很多图文并茂的教程),OpenCV的各个版本应该都兼容,我使用的是2.4.6。
3).这个工程源码不是个人编写,而是我直接从OpenCV中拷贝出来的。
完成上述配置之后你会发现项目中的源文件有以下几项:
camera_calibration.cpp----相机标定的源码
in_Arlco_Camera_data.xml----某款相机的标定参数配置文件
Arlco_Camera.xml----某款相机的标定用图片索引文件
in_Logitech_C170.xml----另一款相机的标定参数配置文件
Logitech_C170.xml----另一款相机的标定用图片索引文件
此时如果点击运行则标定的是Arlco相机,且标定使用的是预先拍好的图片。
2.相机标定的配置过程。
经过第一部分的介绍,下面你要做的就是更改配置来标定你自己的相机(注意:这个时候你已经打印了一张自己的标定黑白棋盘),请紧跟下列步骤:
1).在工程目录中找到文件in_Arlco_Camera_data.xml,复制一份改个名字如:in_YourCam_Camera_data.xml 放置在同样的文件夹下,表示这是你自己的相机标定配置文件。
2).修改camera_calibration.cpp源代码中的217行
const string inputSettingsFile = argc > ? argv[] : "in_Arlco_Camera_data.xml";
改为你刚才复制的自己的配置文件,例如:
const string inputSettingsFile = argc > ? argv[] : "in_YourCam_Camera_data.xml";
3).修改你自己的相机标定配置文件in_YourCam_Camera_data.xml,具体如下:
<!-- Number of inner corners per a item row and column. (square, circle) -->
<BoardSize_Width>7</BoardSize_Width>
<BoardSize_Height>5</BoardSize_Height>
这一步配置你的横向和纵向角点(黑白相交的点)数,如下图所示。我的是横向7个,纵向5个,请根据自己的标定棋盘更改相应的数目。

<!-- The size of a square in some user defined metric system (pixel, millimeter)-->
<Square_Size></Square_Size>
这个定义的是你的棋盘格的尺寸,我的是30mm,请根据自己的做更改。
<!-- The type of input used for camera calibration. One of: CHESSBOARD CIRCLES_GRID ASYMMETRIC_CIRCLES_GRID -->
<Calibrate_Pattern>"CHESSBOARD"</Calibrate_Pattern>
这个定义的是你标定用的棋盘类型,如果你用的是黑白棋盘,不用修改。
<Input>"Arlco_Camera.xml"</Input>
<!-- If true (non-zero) we flip the input images around the horizontal axis.-->
<Input_FlipAroundHorizontalAxis></Input_FlipAroundHorizontalAxis>
这个指定的是你标定的时候采用的方式,支持一下三种:
a. 用预先拍好的带有标定棋盘的照片进行标定。(本文采用的标定方式,下面将具体介绍方法)
b.用预先录制好的视频进行标定(支持AVI格式)。用"/tmp/x.avi"代替源码中的"Arlco_Camera.xml"即可,其中x.avi是你录制好的带有棋盘的视频。
c.打开相机边录制边标定。用“1”代替源码中的"Arlco_Camera.xml"即可。
如果采用a方法,需要工程目录中找到文件Arlco_Camera.xml,复制一份改个名字如:YourCam_Camera.xml 放置在同样的文件夹下。这个里面指定了标定用的照片的存放位置和名称,具体代码如下:
<?xml version="1.0"?>
<opencv_storage>
<images>
imges/1.jpg
imges/2.jpg
imges/3.jpg
imges/4.jpg
imges/5.jpg
imges/6.jpg
imges/7.jpg
imges/8.jpg
imges/9.jpg
imges/10.jpg
imges/11.jpg
imges/12.jpg
imges/13.jpg
imges/14.jpg
imges/15.jpg
imges/16.jpg
imges/17.jpg
imges/18.jpg
imges/19.jpg
imges/20.jpg
imges/21.jpg
imges/22.jpg
imges/23.jpg
imges/24.jpg
imges/25.jpg
imges/26.jpg
imges/27.jpg
</images>
</opencv_storage>
你不需要修改,只需要把工程目录下的imges文件夹里的图片换成你自己的就可以了,图片名称还是用1~27的数字。
继续回到in_YourCam_Camera_data.xml文件修改参数:
<!-- How many frames to use, for calibration. -->
<Calibrate_NrOfFrameToUse></Calibrate_NrOfFrameToUse>
这里27指定了你预先拍照的数量,可以修改,但是需要相应的修改YourCam_Camera.xml文件。
<!-- The name of the output log file. -->
<Write_outputFileName>"out_Arlco_Camera_data.yml"</Write_outputFileName>
这里指定的是你的标定参数保存的文件名称,用自己的名字如:out_YourCam_Camera_data.yml 代替:out_Arlco_Camera_data.yml 即可。
ok,其余的参数用默认即可,这个时候请把你修改好的文件:in_YourCam_Camera_data.xml 和 YourCam_Camera.xml 添加到工程项目的源码中。
此时点击运行口可以标定你自己的相机了,最后的结果会保存在工程目录下,名字就是上一步你自己设置的out_YourCam_Camera_data.yml。
标定过程如下图所示:
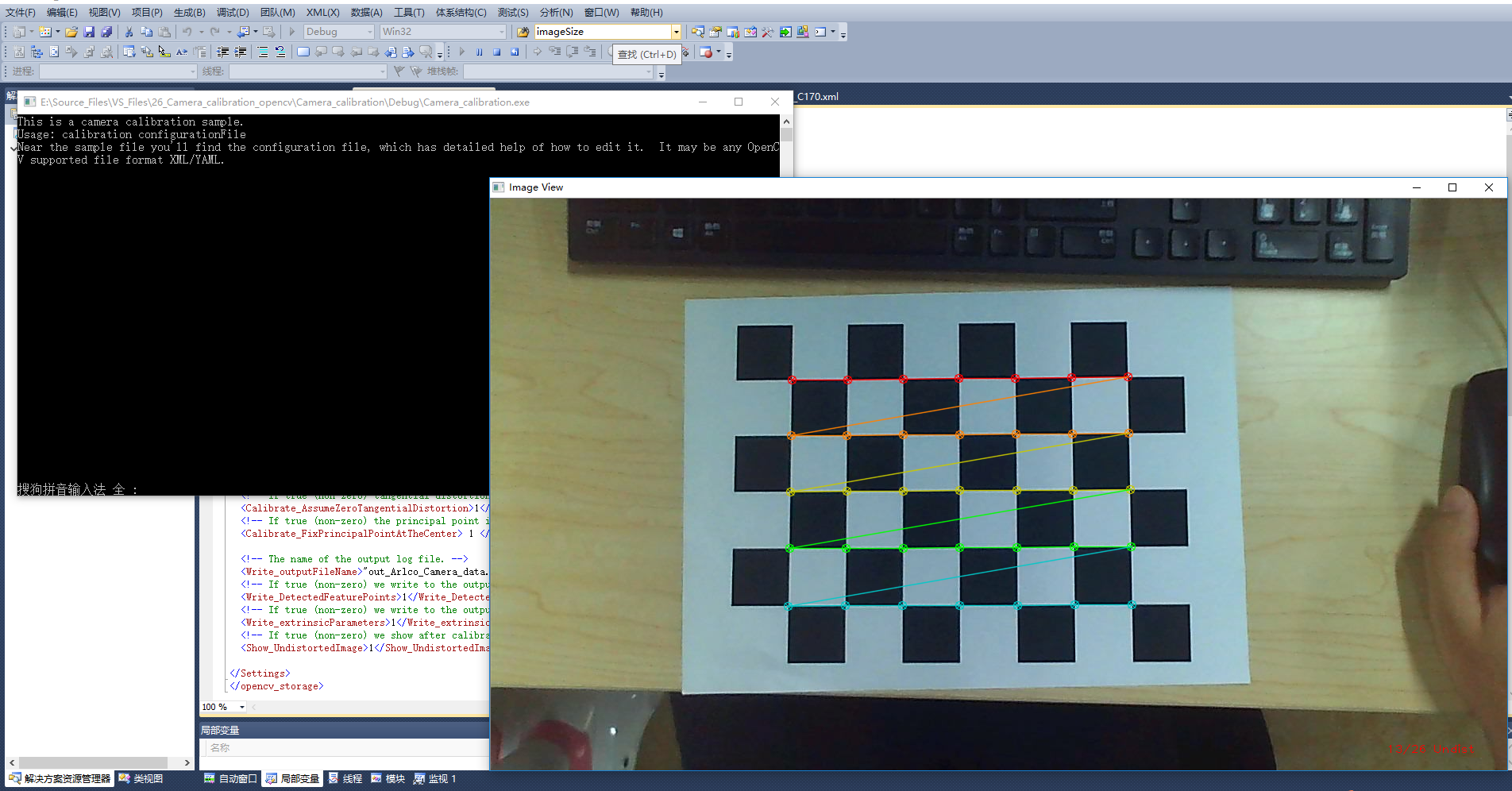
完成后你就可以看到相机内参、外参以及畸变系数了,部分数据如下:
%YAML:1.0
calibration_Time: "09/02/17 14:27:10"
nrOfFrames:
image_Width:
image_Height:
board_Width:
board_Height:
square_Size: .
FixAspectRatio: .
# flags: +fix_aspectRatio +fix_principal_point +zero_tangent_dist
flagValue:
Camera_Matrix: !!opencv-matrix
rows:
cols:
dt: d
data: [ 1.0078520005023535e+003, ., 6.3950000000000000e+002, .,
1.0078520005023535e+003, 3.5950000000000000e+002, ., ., . ]
Distortion_Coefficients: !!opencv-matrix
rows:
cols:
dt: d
data: [ -4.9694653328469340e-002, 2.3886698343464000e-001, ., .,
-2.1783942538569392e-001 ]
Avg_Reprojection_Error: 6.4271522441441153e-001
Per_View_Reprojection_Errors: !!opencv-matrix
rows:
cols:
dt: f
data: [ 3.89407665e-001, 4.69866753e-001, 3.74819994e-001,
4.79580641e-001, 2.85050988e-001, 3.93756509e-001,
9.21430171e-001, 7.79153645e-001, 6.87648296e-001,
6.19106829e-001, 6.83992207e-001, 6.41160131e-001,
2.52024829e-001, 2.94729859e-001, 4.55538809e-001,
7.44070828e-001, 4.21751559e-001, 5.13929784e-001,
6.03685081e-001, 1.09411442e+000, 1.20731401e+000,
8.70341241e-001, 3.22936684e-001, 4.73881990e-001,
8.06841075e-001, 6.78049505e-001 ]
我用的图片是1280x720的,这个数据是根据你用的标定图片得出的。
3.总结
本文是为视觉入门者准备的,后续我会陆续介绍在linux下的标定过程,包括用其他开源库如ArUco等的标定方法。
作者:Shawn
基于OpenCV单目相机的快速标定--源码、工程、实现过程的更多相关文章
- opencv单目摄像机标定(一)
#include <string> #include <iostream> #include <cv.h> #include <highgui.h> u ...
- opencv单目摄像机标定(二)
// 引入实际标定板方格宽度的标定程序 #include <string> #include <iostream> #include <cv.h> #include ...
- CRMEB单商户商城系统v4.0源码,含前端uni-app源码
CRMEB商城系统是基于ThinkPhp6.0+Vue开发的一套新零售移动电商系统,CRMEB系统就是集客户关系管理+营销电商系统,能够快速积累客户.会员数据分析.智能转化客户. 有效提高销售.会员维 ...
- 基于ffmpeg 直播推流和播放rtmp (IOS源码)
ios直播推流每秒能达到30帧,比安卓要强,视频采用软编码的话手机会发烫,得采用码编码,播放视频采用opengl渲染. ffmpeg初始化代码如下: int init_Code(int width, ...
- android适配全机型悬浮框、视频APP项目、手势操作、Kotlin妹子App、相机图片处理等源码
Android精选源码 图片滤镜处理,相机滤镜实时处理,相机拍照录制 android仿爱壁纸App更换壁纸效果源码 基于Kotlin+MVP+Retrofit+RxJava+Glide 等架构实现短视 ...
- 基于MVVM的知乎日报应用安卓源码
使用data binding , dagger2 , retrofit2和rxjava实现的,基于MVVM的知乎日报APP运行效果: <ignore_js_op> 使用说明: 项目结构 a ...
- 源码来袭!!!基于jquery的ajax分页插件(demo+源码)
前几天打开自己的博客园主页,无意间发现自己的园龄竟然有4年之久了.可是看自己的博客列表却是空空如也,其实之前也有写过,但是一直没发布(然而好像并没有什么卵用).刚开始学习编程时就接触到博客园,且在博客 ...
- 干货——基于Nop的精简版开发框架(附源码)
.NET的开发人员应该都知道这个大名鼎鼎的高质量b2c开源项目-nopCommerce,基于EntityFramework和MVC开发,拥有透明且结构良好的解决方案,同时结合了开源和商业软件的最佳特性 ...
- 基于微软企业库的AOP组件(含源码)
软件开发,离不开对日志的操作.日志可以帮助我们查找和检测问题,比较传统的日志是在方法执行前或后,手动调用日志代码保存.但自从AOP出现后,我们就可以避免这种繁琐但又必须要实现的方式.本文是在微软企业库 ...
随机推荐
- 简单模拟struts2及struts2的处理流程介绍
用了几天模拟struts2,最后结果还是很成功的,也基本没有什么遇上比较难解决的问题,万事开头难,在最开始的时候无从下手,看着下面这张struts2工作流程图配合着网上的博客看了一天终于有了眉目. 看 ...
- 排序算法Java实现(希尔排序)
算法描述:先将待排序序列的数组元素分成多个子序列,使得每个子序列的元素个数相对较少,然后对各个子序列分别进行直接插入排序,待整个待排序序列“基本有序”后,再对所有元素进行一次直接插入排序. packa ...
- linux --> 计算机是如何启动的?
计算机是如何启动的? 零.boot的含义 "启动"用英语怎么说?回答是boot.boot原来的意思是靴子,"启动"与靴子有什么关系呢? 原来,这里的boot是b ...
- 关于BufferedReader的readLine方法遇到的坑
今天偶然用到BufferedReader,在读取文本后输出数据的时候遇到了隔行输出的问题. 如: 床前明月光 疑是地上霜 123456 789789 输出的为:疑是地上霜789789 找了一下,最终找 ...
- Spring MVC核心技术
目录 异常处理 类型转换器 数据验证 文件上传与下载 拦截器 异常处理 Spring MVC中, 系统的DAO, Service, Controller层出现异常, 均通过throw Exceptio ...
- 攻防组网之—-MikroTik软路由的配置和FUZZ
作者:红发香克斯 开篇之前一直想借助一台高性能PC利用VMWare组建一个攻防网络,之前有一贴写过找到了一个软路由系统,就是可以在VMWare中使用的路由器操作系统,那个系统还挺常用,上次帖子写到了安 ...
- Maven学习笔记二
依赖范围 <dependency> <groupId>javax.servlet</groupId> <artifactId>servlet-api&l ...
- alpha-咸鱼冲刺day6
一,合照 emmmmm.自然还是没有的. 二,项目燃尽图 三,项目进展 !!!QAQ可以做到跟数据库交互了!!!!先来撒花花!(然后继续甲板) (然后就没有进展了.翻车+1s) 四,问题困难 数据库交 ...
- Socket程序从windows移植到linux下需要注意的
)头文件 windows下winsock.h或winsock2.h linux下netinet/in.h(大部分都在这儿),unistd.h(close函数在这儿),sys/socket.h(在in. ...
- B-day7
1.昨天的困难,今天解决的进度,以及明天要做的事情 昨天的困难:美化了登录页面,对导入导出的bug进行相关修改,对用户编辑页面进行相关美化,对第三方逻辑进行相应调整. 今天解决的进度:解决了导入和导出 ...