Image Processing and Analysis_8_Edge Detection:Multiresolution edge detection techniques ——1995
此主要讨论图像处理与分析。虽然计算机视觉部分的有些内容比如特 征提取等也可以归结到图像分析中来,但鉴于它们与计算机视觉的紧密联系,以 及它们的出处,没有把它们纳入到图像处理与分析中来。同样,这里面也有一些 也可以划归到计算机视觉中去。这都不重要,只要知道有这么个方法,能为自己 所用,或者从中得到灵感,这就够了。
8. Edge Detection
边缘检测也是图像处理中的一个基本任务。传统的边缘检测方法有基于梯度
算子,尤其是 Sobel 算子,以及经典的 Canny 边缘检测。到现在,Canny 边缘检 测及其思想仍在广泛使用。关于 Canny
算法的具体细节可以在 Sonka 的书以及 canny 自己的论文中找到,网上也可以搜到。最快最直接的方法就是看 OpenCV
的源代码,非常好懂。在边缘检测方面,Berkeley 的大牛 J Malik 和他的学生 在 2004 年的 PAMI
提出的方法效果非常好,当然也比较复杂。在复杂度要求不高 的情况下,还是值得一试的。MIT的Bill Freeman早期的代表作Steerable
Filter 在边缘检测方面效果也非常好,并且便于实现。这里给出了几篇比较好的文献,
包括一篇最新的综述。边缘检测是图像处理和计算机视觉中任何方向都无法逃避 的一个问题,这方面研究多深都不为过。
[1980] theory of edge detection
[1983 Canny Thesis] find edge
[1986 PAMI] A Computational Approach to Edge Detection
[1990 PAMI] Scale-space and edge detection using anisotropic diffusion
[1991 PAMI] The design and use of steerable filters
[1995 PR] Multiresolution edge detection techniques
[1996 TIP] Optimal edge detection in two-dimensional images
[1998 PAMI] Local Scale Control for Edge Detection and Blur Estimation
[2003 PAMI] Statistical edge detection_ learning and evaluating edge cues
[2004 IEEE] Edge Detection Revisited
[2004 PAMI] Design of steerable filters for feature detection using canny-like criteria
[2004 PAMI] Learning to Detect Natural Image Boundaries Using Local Brightness, Color, and Texture Cues
[2011 IVC] Edge and line oriented contour detection State of the art
翻译
多分辨率边缘检测技术——http://tongtianta.site/upload
作者:DEOK J.PARK, KWON M.NAM and RAE-HONG PARK
摘要 -摘要-在本文中,我们提出了针对无噪声图像和有噪声的图像的多分辨率边缘检测技术,这些噪声图像被加性高斯噪声或乘法噪声污染。对于边缘检测,它们通过使用相关的不连续性度量来自动确定像素的分辨率。在(2p + 1)x(2p + 1)个窗口中计算出的不连续性度量 的模式用于确定给定像素的分辨率,并根据像素的分辨率将变化比例的边缘运算符应用于该像素。对于由加性高斯噪声污染的无噪声图像和嘈杂图像,将局部方差a用作边缘度度量。对于相乘斑点图像,将实际和理论累积密度函数(CDF's)之间的统计量(例如方差与均方之比s 或最大差d)用作不连续性度量。例如,将所提出的像素分辨率确定算法应用于常规的Canny和LoG边缘检测器,就可以提出所提出的多分辨率边缘检测技术。通过计算机仿真显示了它们的有效性。
的模式用于确定给定像素的分辨率,并根据像素的分辨率将变化比例的边缘运算符应用于该像素。对于由加性高斯噪声污染的无噪声图像和嘈杂图像,将局部方差a用作边缘度度量。对于相乘斑点图像,将实际和理论累积密度函数(CDF's)之间的统计量(例如方差与均方之比s 或最大差d)用作不连续性度量。例如,将所提出的像素分辨率确定算法应用于常规的Canny和LoG边缘检测器,就可以提出所提出的多分辨率边缘检测技术。通过计算机仿真显示了它们的有效性。
关键字:边缘检测,多尺度,间断措施,斑点噪声
Ⅰ 简介
在分析图像时,期望使用强度不连续的信息以及灰度级信息。边缘点可以定义为发生灰度,颜色,纹理,深度或运动突然间断的像素。强度不连续性是由于物体的表面反射率不同,各种照明条件或物体与观察者的距离和方向变化而引起的。 (1)由于边缘检测是诸如图像分析,机器人视觉和图像数据压缩之类的各种应用中的基本过程之一,因此对边缘的可靠检测进行了大量研究。
通常,图像中明显的强度变化会以不同的分辨率或比例发生。例如,模糊的阴影区域和清晰显示细节的聚焦区域可能会共存于同一图像中。因此,选择单个空间分辨率以对整个图像进行最佳边缘检测是一个难题。 (1,2)因此,可以通过使用几种不同的分辨率并整合以各种分辨率获得的边缘图来实现对重大强度变化的最佳检测。
确定给定图像的边缘遮罩的最佳尺寸并不是一件容易的事,因为要在边缘的定位和检测之间进行权衡,通常情况下,较小的边缘遮罩(具有高分辨率)对噪声敏感,有时它检测到多余的细节。相反,较大的边缘遮罩(具有较粗的分辨率)对噪声相对较健壮,但是会遭受必要细节检测的困扰。 Marr和Hildreth(2)观察到,就空间和频域的平滑和局部化而言,高斯滤波器是最佳的,因此通常在边缘检测中使用。在这种边缘检测方案中,高斯的第一和第二方向导数分别用于Canny(3)梯度方法和高斯的Laplacian(LoG)方法。给定图像的比例尺信息不是先验已知的,因此,必须根据试验和误差(取决于输入图像的空间分辨率)为边缘检测确定合适的比例尺。注意,比例是由高斯滤波器的标准偏差定义的。对于具有各种细节的复杂图像,已经开发了具有几种尺度的多分辨率边缘检测方法。 (4-8)
基于生成多个边缘图的方式,多分辨率边缘检测方法分为两类:通过在固定图像尺寸(4,5)的情况下改变滤镜比例的方法,以及通过在固定滤镜比例的情况下更改图像分辨率的方法。 (6-8)前者采用边缘或过滤蒙版,其窗口大小或比例参数根据图像的空间细节而变化。 Marr和Hildreth讨论了使用几种不同边缘蒙版的可能性,Korn(4)建议,通过归一化,可以定义具有不同比例的特殊梯度算子,适用于比较不同滤波图像。在Bergholm边缘聚焦方法中,(5)集成了以不同比例提取的各种边缘图。它生成具有初始比例尺 的初始水平边缘图,然后将较小比例尺(
的初始水平边缘图,然后将较小比例尺( )的边缘检测器仅应用于先前检测到的边缘点及其相邻像素。继续进行边缘聚焦,直到尝试使用预先选定的最小比例
)的边缘检测器仅应用于先前检测到的边缘点及其相邻像素。继续进行边缘聚焦,直到尝试使用预先选定的最小比例 的边缘检测器为止。
的边缘检测器为止。
后一种情况包括使用金字塔结构的分层边缘检测技术。 Tanimoto和Pavlidis(6)引入了金字塔结构以减少处理时间,并提出了许多基于它的分层边缘检测算法。 Schrift等人(7)提出了利用金字塔结构进行边缘检测的更多分析研究,其中在每个金字塔图像上应用了梯度边缘检测方法,并以自顶向下的方式实现了两种边缘检测方案。当前级别的边缘提取由上层检测到的边缘指导,因此最终的边缘检测结果在很大程度上取决于上层提取的边缘信息。
由于可靠的边缘检测不仅需要准确地找到明显的强度变化,而且还需要抑制多余的细节和噪点,因此必须根据空间分辨率对图像进行自适应平滑以实现这些目标。在本文中,我们介绍了一种针对无噪声图像和加性高斯噪声污染的噪声图像的局部方差a,作为像素的边缘度度量,并以此为基础提出了一种新的多分辨率边缘检测算法。在提出的分辨率确定技术中,为了确定给定像素的分辨率,在以给定像素为中心的(2p + 1)×(2p + 1)(p = Pmin ....,Pmax)多分辨率窗口上的局部方差为计算。如果像素的边缘度度量分别小于或大于局部方差的模式,则该像素属于同质区域或边缘区域,其中该模式由最频繁的值定义。将图像中的所有像素递归地分类为具有特定分辨率的区域之一。在边缘检测阶段,根据像素的空间分辨率,将具有不同窗口大小的几个边缘蒙版应用于像素。所提出的技术可以有效地与传统的边缘检测方法相结合,以提高边缘检测的性能。此处,用于边缘检测的可变标度 是高斯函数的标准偏差。
是高斯函数的标准偏差。
此外,上述分辨率确定算法在乘法带噪图像的边缘检测中显示出有效的结果。由于在乘法带噪图像中,均匀区域的梯度会随着下面的灰度级突然变化,由于乘法噪声的信号依赖性,因此不能将局部方差用作边缘度度量。因此,在乘法噪声图像中进行可靠的边缘检测需要独立于平均强度的不连续性度量。方差与均方之比s 以及实际和理论累积密度函数(CDF's)之间的最大差d被用作乘法噪声情况的边缘度度量。
本文分为五个部分。在第2节中,介绍了一种基于一些不连续性度量的像素分辨率确定算法。在第3节中,将提出的分辨率确定算法应用于常规Canny和LoG边缘算子作为提出的多分辨率边缘检测技术的实现示例。在第4节中,将所提议的边缘检测技术与各种传统的边缘检测方法进行了相加和相乘噪声案例的比较。最后,在第5节中给出了结论。
2.像素分辨率的空间分辨率测定
在本节中,提出了基于像素的空间分辨率确定,该空间分辨率是所提出的多分辨率边缘检测技术所基于的。为了确定给定像素的空间分辨率,应该定义代表像素与均匀区域的不相似性的不连续性度量y。请注意,这种分辨率确定算法已成功应用于保留边缘的无伪影平滑和自适应最小二乘平滑处理。(9.10)对于加性高斯噪声图像,局部方差a 被用作边缘度度量,而对于乘法噪声图像,两个不连续度量,局部方差与均方之比s 以及实际CDF与理论CDF之间的最大差d用作不连续性度量。基于这些不连续性度量,将给定图像根据其局部特征分为具有不同分辨率的几个区域。
2.1 无噪音和加噪的情况
在我们的多分辨率方法中,像素被认为是(2p + 1)x(2p + 1)窗口的几个邻域的中心,p = Pmin…,Pmax。参数p 确定所考虑邻域的大小,Pmax和pmin分别表示其最大值和最小值。将这些邻域称为具有不同分辨率的区域进行分析。
我们通常没有关于像素的先验知识,无论它属于同质区域还是边缘区域。通常,边界变化在边界区域附近较大,而在均匀区域则较小。因此,在(2p + 1)×(2p + 1)窗口上计算出的局部方差可用于确定给定像素的分辨率。基于局部方差信息,将具有与(2p + 1)×(2p + 1)窗口中的相邻像素相似的强度值的中心像素确定为分辨率p是均匀的。由于均匀区域中的噪声比边界区域中的噪声更令人讨厌,因此必须很好地抑制或平滑均匀区域中的噪声元素。所提出的分辨率确定算法首先使用最大可能的窗口选择相对均匀的区域,然后递归选择窗口大小逐渐减小的区域,从这个意义上说,所提出的方法采用了从粗到精的方法。
首先,在p = Pmax的最大窗口上按像素方向计算局部方差。对于给定的图像g(i,j),局部均值mg和局部方差a 通过下式估算: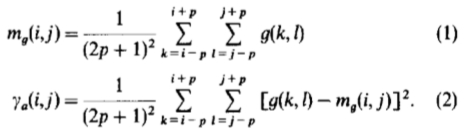
假设由(2)在同质(2p + 1)×(2p + 1)邻域中计算出的局部方差的期望值小于在整个图像上计算出的分布的峰值,该分布的假定为令 p为由分辨率为p的局部方差分布的最大峰值位置定义的模式。因此,将具有小于p的局部方差的区域确定为分辨率为p的均匀区域。例如,图1显示了256×256 Lena图像的局部方差及其模式1的分布。
p为由分辨率为p的局部方差分布的最大峰值位置定义的模式。因此,将具有小于p的局部方差的区域确定为分辨率为p的均匀区域。例如,图1显示了256×256 Lena图像的局部方差及其模式1的分布。
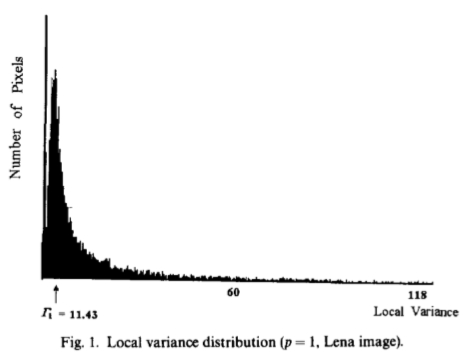
图1:局部方差分布(p = 1,Lena图像)
所提出的算法从最低分辨率开始确定像素的分辨率,并且具有大于min的局部方差的像素需要用于边缘检测的最佳分辨率。 pmax和pmin的有效值取决于图像细节和输入图像中的噪声水平,并且pmax的选择要在一定程度上实现,以便在用(2pmax + 1)×(2pmax + 1)窗口。实验上,根据输入图像的复杂程度,使用3至5的Pmax。在按像素确定空间分辨率之后,根据局部特征合理地划分输入图像,并根据其空间分辨率将具有不同大小的边缘检测器应用于相关区域。确定边缘检测的空间分辨率的更详细算法如下所述。
首先,在预处理步骤中,选择候选边缘点。由于候选边缘点的选择是提取具有强度变化的区域,如果有的话,可以通过较小的局部窗口(即pu = 1或2)实现。对于每个像素,计算局部方差,然后计算其模式pu ,根据局部方差的分布进行估算。将具有比pu 大的局部方差的区域初始化为边缘检测的候选区域,并为其分配二进制标签ce(i,j)= 1。由于未被选择为候选区域的区域对应于具有均匀灰度级分布的相对均匀的区域,因此跳过以cu(i,j)= 1标记的边缘检测处理。
接下来,仅对从Pmax到Pmin(从粗到细)标记为ce(i,j)= 1的候选边缘区域执行以下处理。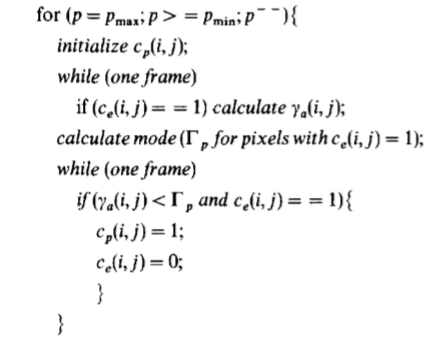
以类似的方式,模式p是根据分辨率为p的局部方差分布估算的。在上述算法中,cp(i,j)= 1表示在给定的分辨率p下,选择了具有比p小的局部方差的像素作为属于同质区域的像素,而ce(i,j)= 0表示对像素(i,j)的分辨率确定处理终止。最后,根据局部统计将输入图像分为(Pmax-Pmin +3)个区域,即ce(i,j)= 1,cpmax(i,j)= 1 .....,cpmin(i,j)的区域)= 1,而cu(i,j)= 1。
将上述分辨率确定算法应用于pmax = 3和pmin = 1的Lena图像。图2显示了每种分辨率下像素分类的示例。注意,图2中的黑色像素对应于二进制值1。图2(f)中的白色像素表示在预处理步骤中选择的候选边缘区域,图2(c)-(e)中的黑色像素表示分别以分辨率p = 1、2和3选择的区域。图2(b)中的黑色像素是最后一步之后具有最小分辨率pmin的剩余点,它们属于强度变化最大的区域。接下来,根据其分辨率,将具有不同比例的边缘运算符应用于相关像素。
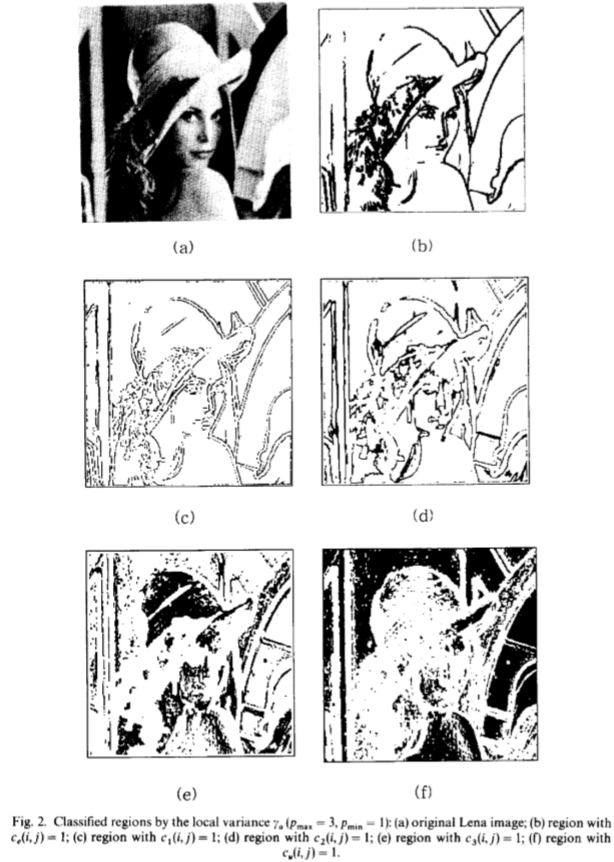
图2:按局部方差a 分类的区域。(pmax= 3,pmin= 1):(a)原始Lena图像;(b)ce(i,j)= 1的区域;(c)c1(i,j)= 1;(d)c2(i,j)= 1的区域;(e)c3(i,j)= 1的区域; (f)cu(i,j)= 1的区域。
2.2乘性噪声情况
在实际应用中,斑点噪声是乘法噪声的最常见示例。散斑图像由干涉图案产生,这些干涉图案是由来自表面的随机散射产生的,该表面在照亮的光波长范围内很粗糙。 (11)斑点在图像中显示为具有信号相关属性的叠加的细颗粒纹理。斑点的存在严重恶化了图像质量,因此斑点的去除是诸如合成孔径雷达(SAR)图像,激光图像和超声图像之类的相干图像中遇到的重要问题之一。在许多应用中,通过非相干地平均从非重叠频带获取的N个此类图像来减少斑点。生成的具有N个外观的斑点图像g(i,j)进行了伽马分布,其概率密度函数(pdf)由(11)表示
其中u 和u2 / N(= u2)分别是散斑图像的均值和方差,而(.)表示伽玛函数。由此得出,斑点图像的SNR由√N 给出,它独立于平均强度u。由于伽玛分布的均方与方差成正比,因此散斑图像的局部方差随局部平均灰度级而变化。换句话说,在均匀区域内,平均值越大,方差越大。因此,对于散斑图像,传统的基于梯度的边缘检测器性能较差,因此将局部方差与均方之比而不是局部方差本身用作不连续性度量。
对于斑点图像,各种边缘检测方法(例如变异系数(CoV)检测器,(12)高斯拉普拉斯算子(LoG)/平均比率(RoA)方法,(13)和Touzi等人的方法(12))具有已开发。 CoV检测器使用以下性质:对于均质区域,由v/u =  定义的CoV不依赖于局部均值u。实际上,由于v / u分布在
定义的CoV不依赖于局部均值u。实际上,由于v / u分布在 附近,如果
附近,如果 ,则将局部窗口的中心像素分配给同质区域,否则将其分类为不均匀区域,其中
,则将局部窗口的中心像素分配给同质区域,否则将其分类为不均匀区域,其中 是一个小的正常数。
是一个小的正常数。
在LoG / RoA边缘检测器中,通过对由LoG操作检测到的零交叉点与通过RoA方法检测到的点之间进行逻辑与运算来获得边缘图。在倍增噪声的情况下,图像的梯度随基础图像强度而变化。因此,对数统计量llog R(i,j)-log L(i,j)l 被max {1og(R(i,j)/ L(i,j)),log(L(i,j)/ R (i,j))},其中运算max {.,.}取较大的值,而R(i,j)和L(i,j)是通过该中心的左右邻域的平均值。或等效地,由max {R(i,j)/ L(i,j),Li,j)/ R(i,j)定义的平均比率估算值H(i,j) },估计边缘幅度的水平分量,类似地,为垂直边缘分量定义估计(i,j),然后通过均方根(rms)值即RoA(i,j)给出边缘幅度)= [H2(1,j)+ V2(i,j)] 1/2。如果RoA(i,j)> T,则中心像素(i,j)被分类为边缘点,其中T为一个仅在那些候选边缘点处的零交叉点被确定为强度发生有意义的变化的边缘点。
在Touzi等人的方法中,根据像素值之间的比率,从理论上为给定的虚警概率(Pfa)确定决策阈值,该概率表示同质区域中的像素被错误地分配给边缘点的概率。
刚刚描述的常规边缘检测方法很好地降低了乘法噪声的信号依赖性,并且在提出的分辨率确定算法中使用的不连续性度量必须独立于平均强度。在雷达图像中众所周知,对于均匀区域,方差与均方之比不取决于局部均值,即对于具有N个外观的散斑图像,其差是1 / N。在此,由不连续性度量7定义方差与均方之比。实际上,使用(1)和(2)在一个窗口上计算估计值s 。通常,s越大,则中心像素更可能属于边缘区域。例如,图3(a)和(b)显示了具有四个外观的斑点图像在均质和边界区域中s的分布,该图像由两个恒定级别组成,平均级别分别为5和3。如图3所示,y在均匀区域的1 / N(= 0.25)附近密集分布,并且在边界区域附近,其值可能大于1 / N。因此,可以将具有小于1 / N + 的不连续性度量的像素(其中是小的正常数)分配给同质区域,其中s用作散斑图像的不连续性度量。
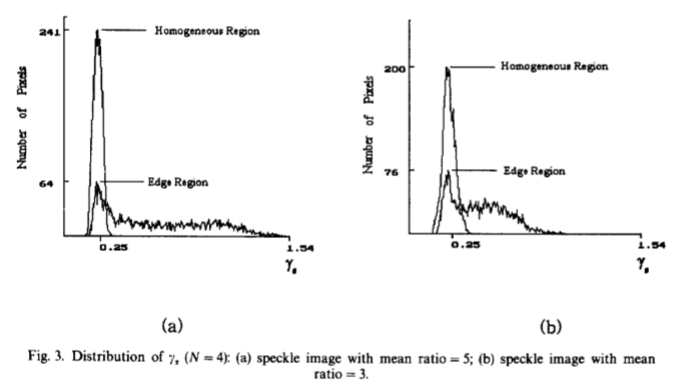
图3:a 的分布,(N = 4):( a)均值= 5的斑点图像;(b)均值= 3的斑点图像。
本文提出的另一种不连续性度量是最大CDF差异d,它由所考虑的子块内像素的灰度级的实际CDF与理论CDF之间的最大差异定义。对于具有N个外观的斑点图像,均匀区域中的CDF为
等式(4)是外观数量N和平均强度u的函数。如果外观数量N是已知的,那么它仅是平均强度u的函数。例如,散斑图像的CDF2(g)和CDF4(g)由下式给出
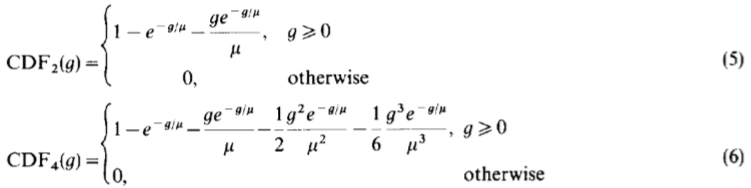
分别。如果给定图像是遍历的,则对于大窗口满足上述统计属性,因此将使用在局部窗口上计算的平均值us代替u。注意,对于给定的斑点图像,理论CDFN遵循与在均匀区域上估计的分布曲线相似的分布曲线,而在边缘区域附近则显示出较大的差异,分别如图4(a)和(b)所示。如果将d定义为实际CDFN与理论CDFN之间的最大差,则d越大,就象s的情况而言,邻域更可能属于边缘。图4(c)和(d)显示了散斑图像的d分布,散斑图像由两个恒定级别组成,平均比率分别为5和3。因此,观察到可以将d用作散斑图像的边缘度度量。
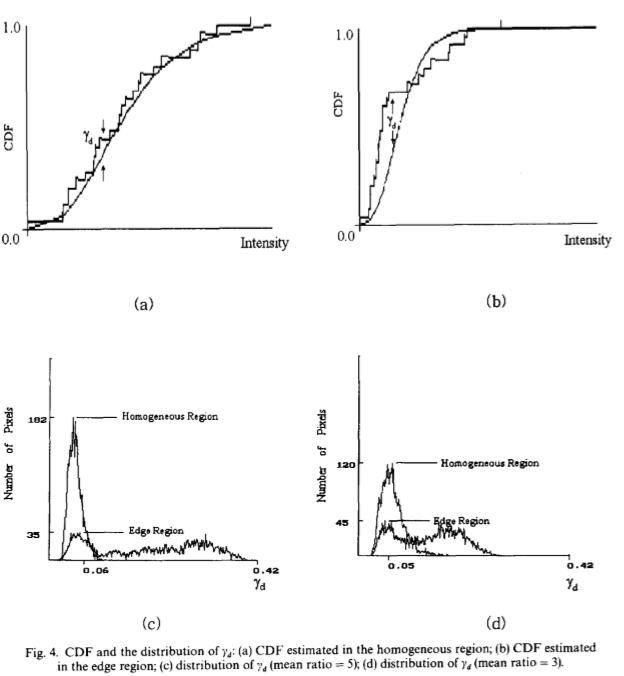
图4:CDF和d的分布:(a)在均质区域估计的CDF; (b)在边缘区域估计的CDF; (c)d的分布(平均比= 5k)(d)d的分布(平均比= 3)。
散斑图像的像素方向空间分辨率可以基于s或d确定。图5(a)和(b)显示了原始航拍图像,图5(c)和(d)显示了有四个外观的斑点航拍图像,可以很好地观察到斑点信号的信号依赖性,即平均值越大强度越大,出现的斑点噪声越多。在图6中显示了为图5(c)所示的斑点航空图像在每种分辨率下选择的区域。类似于高斯噪声情况,图6(f)中的白色像素被初始化为候选边缘区域,而黑色像素在图6(f)中被初始化。图6(b)(e)对应于以指定的分辨率p选择的区域。用于选择候选区域的分辨率pu应该大于平均斑点宽度,并且pu = 4是通过实验选择的。注意,图6(a)显示了强度变化最剧烈的其余点。
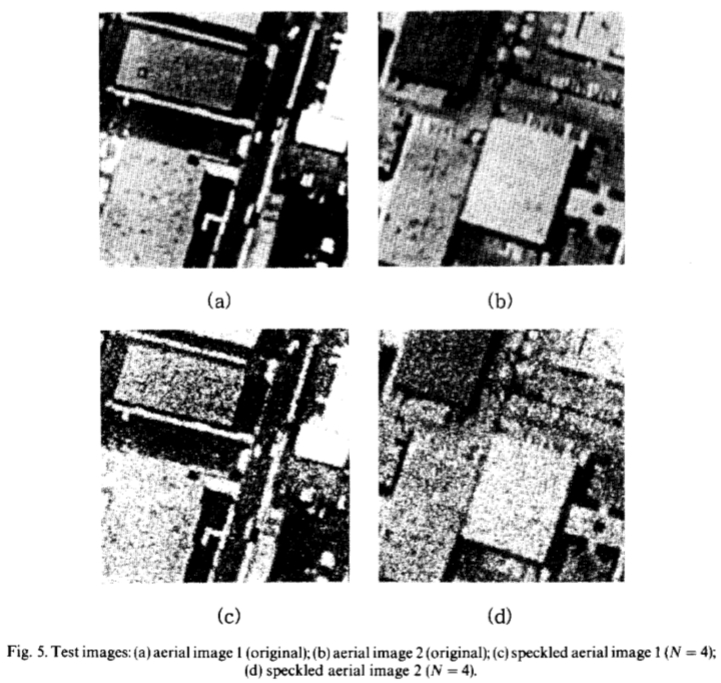
图5:测试图像:(a)航空影像1(原始):(b)航空影像2(原始); (c)斑点的丙烯图像1(N = 4); (d)斑点的航空影像2(N = 4)。
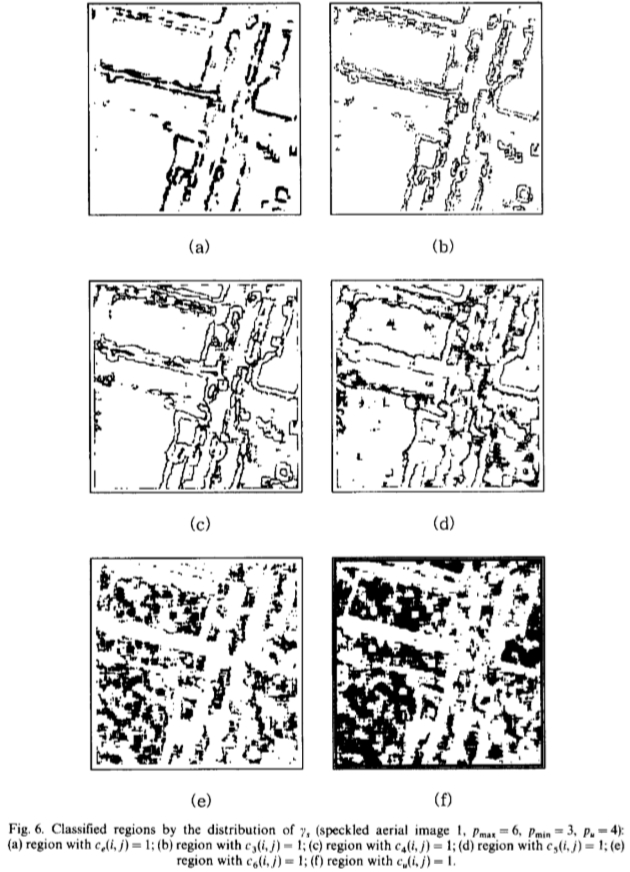
图6:按s的分布分类区域(斑点航空图像1,pmax= 6,pmin = 3,pu= 4;(a)具有ce(i,j)= 1;(b)区域 其中c3(i,j)= I;(c)区域中c4(i,j)= 1;(d)具有c5(i,j)= 1的区域;(e)具有c6(i,j )= 1;(f)具有cu(i,j)= 1的区域。
3 建议的多分辨率边缘检测技术
为了评估所提出的用于多分辨率边缘检测的分辨率确定算法的性能,将其与常规边缘检测方法(如Canny方法和LoG算子)相结合。不用说,可以通过使用任何其他边缘检测方法或不连续性度量来实现各种多分辨率边缘检测技术。根据其空间分辨率,将具有不同比例的边缘运算符应用于相关像素,其中比例参数表示所应用的高斯函数的标准偏差。
在第2节中,图像中的每个像素都贴有不同的标签,例如cu(i,j)= 1,ce(i,j)= 1,或 cp(i,j)= 1,p = Pmin…,Pmax ,具体取决于其分辨率。在这些标记中,标记为ce(i,j)= 1的像素具有最大的强度变化,并且随着索引p变大,具有cp(i,j)= 1的区域属于更均匀的区域。将比例最小的 的边缘算子应用于ce(i,j)= 1标记的区域,分辨率为p的比例
的边缘算子应用于ce(i,j)= 1标记的区域,分辨率为p的比例 由 = +
由 = +  x(p-pmin + 1)指定,其中是单位比例增量。应当注意,提出的边缘检测技术很好地提取了边界区域附近的有效边缘,并且令人满意地抑制了均匀区域中的噪声失真。考虑到假设 = 1,相同点的检测边缘位置之间的位移不超过2个像素这一事实,最小比例尺设置为1.0〜1.5,单位比例增量设置为0.35〜0.5。 (14)如果太大,则在每种分辨率下检测到的边缘点的模糊都会很严重。相反,如果太小,则难以在具有不同分辨率的相邻区域之间区分空间特性。因此,应通过考虑边缘检测的平滑和局部化之间的折衷关系来适当确定。在我们的仿真中,观察到上述那些参数值是正确的。
x(p-pmin + 1)指定,其中是单位比例增量。应当注意,提出的边缘检测技术很好地提取了边界区域附近的有效边缘,并且令人满意地抑制了均匀区域中的噪声失真。考虑到假设 = 1,相同点的检测边缘位置之间的位移不超过2个像素这一事实,最小比例尺设置为1.0〜1.5,单位比例增量设置为0.35〜0.5。 (14)如果太大,则在每种分辨率下检测到的边缘点的模糊都会很严重。相反,如果太小,则难以在具有不同分辨率的相邻区域之间区分空间特性。因此,应通过考虑边缘检测的平滑和局部化之间的折衷关系来适当确定。在我们的仿真中,观察到上述那些参数值是正确的。
令Gi(i,j)和Gj(i,j)分别表示用于i和j方向的二维可分离边缘掩模。在将图像g(i,j)与比例参数指定的滤波器进行卷积后,获得两个结果图像Mi(i,j)和Mj(i,j)作为
其中*表示二维卷积。注意,该操作不适用于cu(i,j)= 1的区域。然后根据Mi(i,j)和Mj(i,j)定义梯度幅度M(i,j)和边缘方向信息 );
);
通过基于M(i,j)和的阈值化和细化处理获得最终的边缘图。阈值处理有两个参数: thh和thl(3)如果轮廓的任何一个像素的梯度大小大于较高的阈值thh,则立即将其确定为阈值映射中的边缘点。如果thh> M(i,j)> thl,thl是下阈值,则将检测到的边缘点连接到的相邻点添加到边缘区域。在细化过程中,使用了非最大抑制算法。 (1,4)图7显示了所提出的多分辨率边缘检测技术的整体流程。
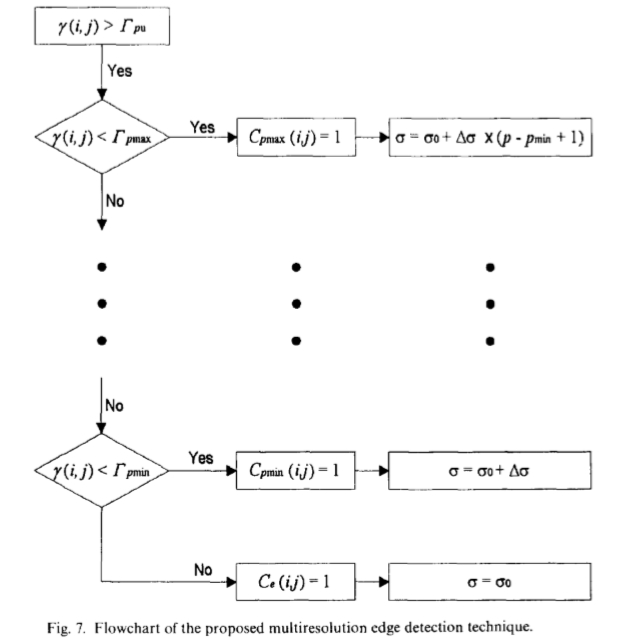
图7:所提出的多分辨率边缘检测技术的流程图。
4.仿真结果与讨论
为了显示所提出的多分辨率边缘检测算法的有效性,进行了计算机仿真,其中将所提出的算法用于合成噪声图像的结果与常规方法的结果进行了比较。还给出了所提出的技术和几种常规方法对真实图像和噪声图像的仿真结果。性能比较是在均匀地量化为8位的256×256真实图像上进行的。
4.1合成图像的性能比较
在边缘检测的性能分析中,正确和错误检测边缘的分析和实验比较是有用的。边缘检测算子的性能可以通过各种方式进行比较。可以主观地或定量地比较梯度图像或二进制边缘图。本文考虑了噪声图像的量化性能指标。由Abdou和Pratt(15)引入的用于评估边缘检测算子的噪声性能的品质因数F定义为

其中II 和IA 分别是理想边缘点和实际边缘点的数量,而d(k)表示从检测到的第k个边缘点到正确边缘位置的像素距离。  是在我们的实验中设置为1的缩放常数。
是在我们的实验中设置为1的缩放常数。
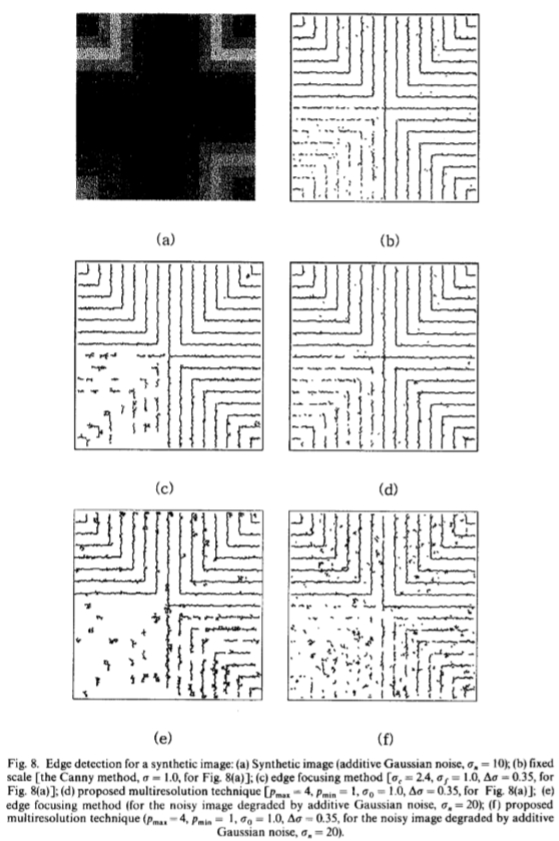
图8:合成图像的边缘检测:(a)合成图像(加性高斯噪声, n= 10;(b)固定比例尺[Canny方法, = 1.0,图8(a)):(c) 边缘聚焦方法[c = 2.4,f = l.0, = 0.35,对于图8(a)]:(d)提出的多分辨率技术[pmax= 4,pmin = 1,0 = 1.0, = 0.35, (针对图8(a));(e)边缘聚焦方法(对于因加性高斯噪声而退化的嘈杂图像,n= 20;(f)提出的多分辨率技术(pmax= 4,pmin = 1,0 = 1.0, = 0.35, 对于加性高斯噪声使n= 20降级的噪点图像。
n= 10;(b)固定比例尺[Canny方法, = 1.0,图8(a)):(c) 边缘聚焦方法[c = 2.4,f = l.0, = 0.35,对于图8(a)]:(d)提出的多分辨率技术[pmax= 4,pmin = 1,0 = 1.0, = 0.35, (针对图8(a));(e)边缘聚焦方法(对于因加性高斯噪声而退化的嘈杂图像,n= 20;(f)提出的多分辨率技术(pmax= 4,pmin = 1,0 = 1.0, = 0.35, 对于加性高斯噪声使n= 20降级的噪点图像。
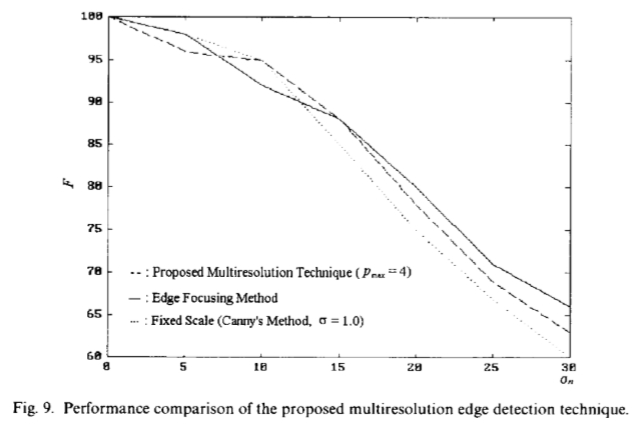
图9:所提出的多分辨率边缘检测技术的性能比较。
用于性能比较的合成图像包含理想的阶跃边缘,并且在第一,第二,第三和第四象限中它们的阶跃大小分别为50、40、20和30。该合成图像被具有零均值和变化标准偏差 的加性高斯噪声所污染。考虑将两种常规方法(如Canny梯度方法(3)和Bergholm边缘聚焦(5))与所提出的技术进行性能比较。合成图像的一些边缘检测结果如图8所示,合成图像的品质因数F作为的函数,如图9所示。在图9中,虚线表示Canny方法具有固定比例尺( = 1),实线表示Bergholm边缘聚焦方法(c= 2.4, f= 1.0, = 0.35)。虚线表示所提出的多分辨率边缘检测技术(pmax = 4,0 = 1.0, = 0.35),其中使用了五个不同的比例,如伯格霍尔姆边缘聚焦方法。
的加性高斯噪声所污染。考虑将两种常规方法(如Canny梯度方法(3)和Bergholm边缘聚焦(5))与所提出的技术进行性能比较。合成图像的一些边缘检测结果如图8所示,合成图像的品质因数F作为的函数,如图9所示。在图9中,虚线表示Canny方法具有固定比例尺( = 1),实线表示Bergholm边缘聚焦方法(c= 2.4, f= 1.0, = 0.35)。虚线表示所提出的多分辨率边缘检测技术(pmax = 4,0 = 1.0, = 0.35),其中使用了五个不同的比例,如伯格霍尔姆边缘聚焦方法。
检查图9所示的品质因数F表明,具有固定比例的Canny方法比任何其他方法对噪声更敏感,并且随着图像中噪声水平的提高,边缘聚焦方法比所提出的技术给出更好的结果。由于观察到的性能度量F强调的是检测到的边缘的局部性而不是边缘的存在,因此强调有效边缘元素的边缘聚焦方法可能比基于性能度量F的拟议技术具有更好的结果。图8揭示了边缘聚焦方法无法检测到第三象限中的许多边缘点,其中边缘步长相对较小。另请注意,经常会出现边缘点云。随着噪声水平的增加,该现象变得严重,例如,n= 20。在边缘聚焦方法中,由于从粗到精的方案,最终边缘图取决于初始边缘图,因此用于边缘聚焦方法的初始比例(c = 2.4)太大,无法检测到边缘点在合成图像的第三象限中,其中相对步长较小。
从上述计算机仿真结果来看,在边缘分辨率的检测和定位方面,所提出的技术和在多分辨率环境中实现的边缘聚焦方法的性能要优于具有固定比例的Canny方法。
4.2 无噪声图像和被加性高斯噪声污染的嘈杂图像的性能比较
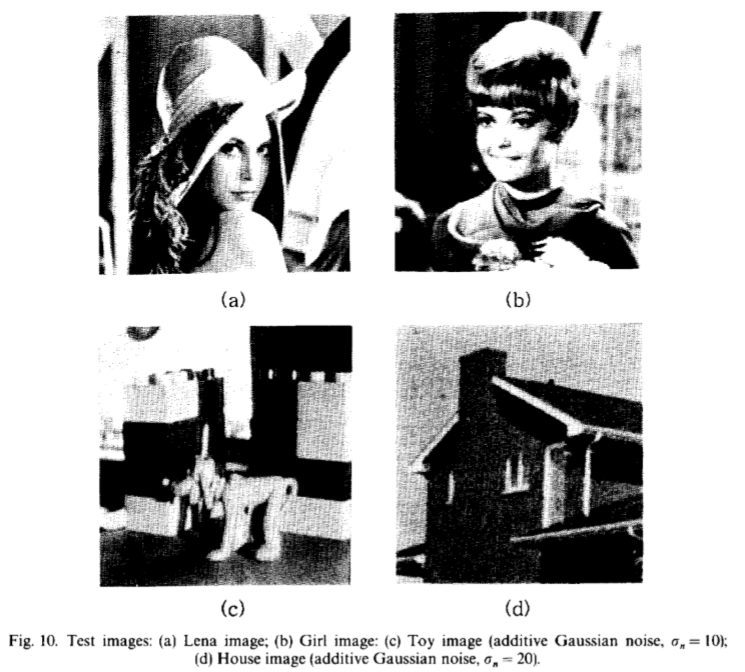
图10:测试图像:(a)莉娜图像;(b)女孩图像;(c)玩具图像(加性高斯噪声,n=10); (d)房屋图像(加性高斯噪声,n=20)
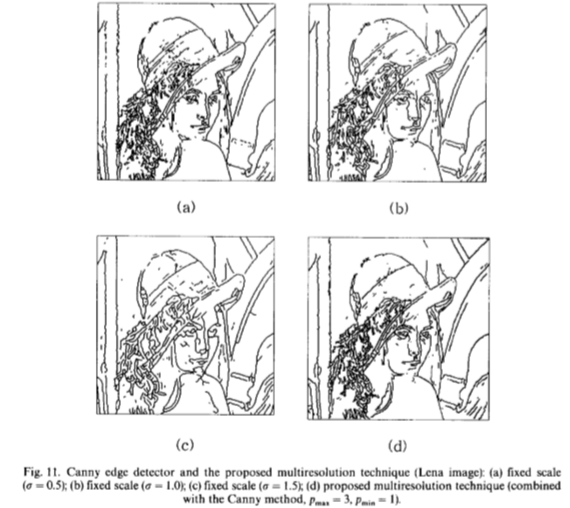
图11:Canny边缘检测器和建议的多分辨率技术(Lena成像仪(a)固定比例( = 0.5);(b)固定比例( = 1.0);(c)固定比例( = 1.5);(d )提出的多分辨率技术(结合Canny方法,pmax=3,pmin=1)(d)
分辨率确定算法在常规Canny或LoG边缘检测器中的应用产生了提出的多分辨率边缘检测技术。为了显示其性能,我们在模拟中使用了四个测试图像,如图10所示。图11显示了Canny方法的三个不同比例的结果; = 0.5、1.0和1.5,以及拟议的多分辨率技术使用四个比例的结果。不同的比例(pmax = 3,pmax = 1)。对于 = 0.5 [图11(a)],1.0 [图11(b)]和1.5 [图11(c)],边缘点的数目分别为6092、6080和5662,对于= 0.5 [图11(c)]。提出的多分辨率技术[Fig11(d)]与Canny方法相结合。高分辨率的边缘检测可产生详细而准确的边缘点。然而,以较高分辨率进行边缘检测会抑制冗余细节,并且仅检测到重要的边缘点,但是边缘位置和详细边缘分量的准确性会丢失。图11(c)显示,在粗略分辨率下,可以很好地检测到左侧的垂直直线和右下角的水平直线,其中强度逐渐变化,而左下角的细细节区域为由于平滑效果而丢失。相反,在精细分辨率下,如图11(a)所示,未检测到渐变,而精细细节被很好地提取。但是,如图11(d)所示,所提出的多分辨率技术令人满意地集成了以各种分辨率检测到的所有边缘元素。 Canny方法和提出的技术中不同的阈值或参数值可能会导致不同的边缘图。通过实验选择阈值和参数值,以使均匀区域中的错误边缘数量和有效边缘损失最小化。
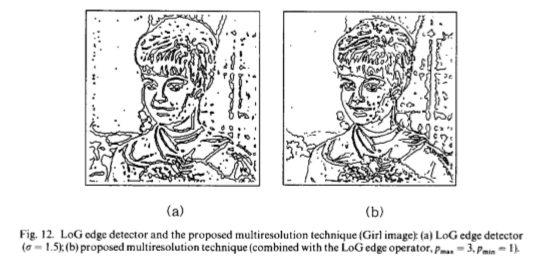
图12:LoG边缘检测器和提出的多分辨率技术(女孩图像):( a)LoG边缘检测器( = 1.5);(b)提出的多分辨率技术(结合LoG边缘算子,pmax=3,pmin=1)
具有固定比例尺( = 1.5)的LoG算子与所建议的多分辨率技术(pmax = 3,pmin= 1,0 = 1.0, = 0.35)之间的性能比较如图12所示。如图12所示( a),LoG操作员检测到许多通常在均匀区域中出现的假边缘轮廓。多分辨率技术与LoG运算符相结合,减少了均匀区域中的伪边缘轮廓,并很好地检测到重要的边缘点,如图12(b)所示。从边缘检测结果可以看出,采用的多分辨率技术会根据给定像素的局部属性自动选择最佳空间分辨率。

图13:噪声图像的性能比较(玩具图像,加性高斯噪声,n = 10;(a)Canny方法(= 21.0);(b)金字塔方法;(c)边缘聚焦方法( = 2.05) );(d)提出的多分辨率技术(与Canny方法结合使用,pmax=3,pmin=1,pu = 1)。
嘈杂的测试图像也用于比较边缘检测性能。为了进行更现实的比较,选择常规技术的参数以提供与提议的边缘点几乎相同数量的边缘点(在±5%之内)。图13显示了n = 10时被加性高斯噪声破坏的噪点图像的边缘检测结果。图13(a)所示的比例固定的Canny方法检测到均匀区域中的一些虚假边缘,并显示了一些不连续的边缘强度逐渐变化。图13(b)所示的Schrift等人的金字塔方法(7)在很大程度上取决于上层提取的边缘,并且由于顶部的原因,无法检测到某些在上层没有提取的边缘点。算法的特性如图13(c)所示,边缘聚焦方法也未检测到未在较粗水平提取的区域,并且会引起边缘点的锯齿状云团。然而,如图13(d)所示,所提出的多分辨率技术与Canny方法相结合,很好地抑制了均匀区域中的伪边缘点,并显示了更好的边缘检测结果。
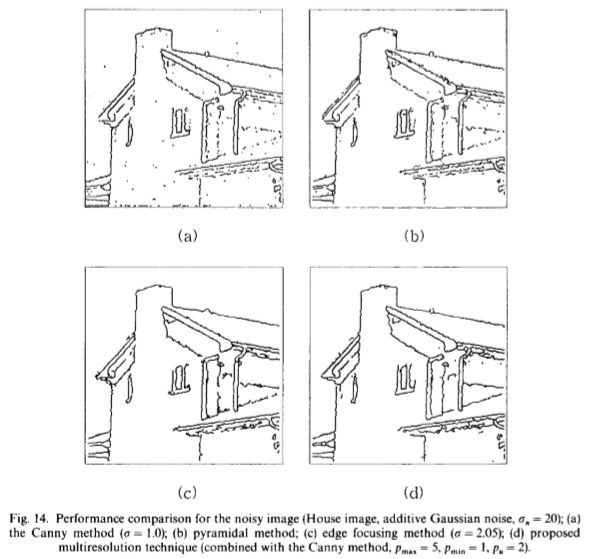
图14:噪声图像的性能比较(房屋图像,加性高斯噪声,n = 20;(a)Canny方法(= 1.0);(b)金字塔方法;(c)边缘聚焦方法(= 2.05) );(d)提出的多分辨率技术(与Canny方法结合使用,pmax=3,pmin=1,pu = 1)。
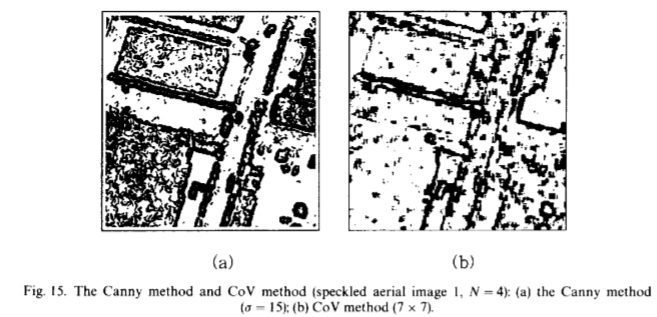
图15:Canny方法和CoV方法(斑点航拍图像1,N=4); (a)Canny方法(= 15):(b)CoV方法(7×7)
以与图13相同的方式,在图14中显示了由n = 20的加性高斯噪声破坏的嘈杂房屋图像的边缘检测结果,图14显示了与图13相似的趋势。如图14(a)所示,图像由于附加噪声而受到更严重的破坏,对于Canny方法,出现了更多的虚假边缘点。常规方法会丢失屋顶左上部分和右下部分的许多边缘,并显示一些不连续的边缘。但是,所提出的方法与Canny方法相结合,可以很好地检测到屋顶附近的边缘,并且可以提取干净且相连的边缘。
4.3 散斑图像的性能比较
在下面的讨论中,将给出斑点图像的边缘检测结果。将传统的边缘检测方法(例如CoV边缘检测器,(12)RoA方法,(13)和Touzi等人的方法(12))与使用s和d作为边缘度度量的建议技术进行了比较。图15显示了Canny方法和CoV边缘检测器的结果。在坎尼梯度法中,如图15(a)所示,由于斑点噪声的信号依赖性,许多伪边缘点出现在平均值较大的均匀区域中。图15(b)所示CoV的结果说明了信号依赖性的降低效果,但是在均匀区域中仍然出现一些假边缘,因此选择阈值会严重影响边缘图。
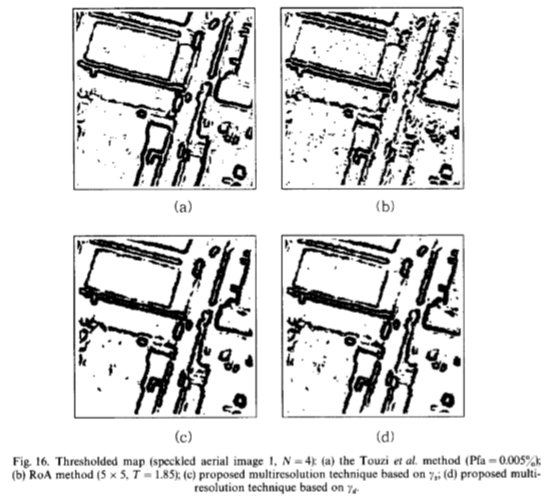
图I6:门限图(航空影像1,N = 4); Touzi等人的方法(Pfa = 0.005%)(b)RoA方法(5 x5,T = 1.85); (c)基于s提出的多分辨率技术; (d)基于d的推广的多分辨率技术
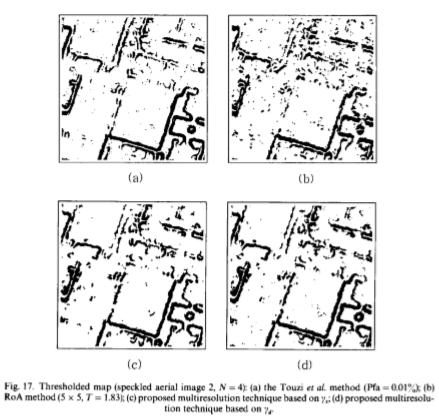
图17:阈值图(有斑点的航拍图像2,N = 4);(a)Touzi等人的方法(Pfa = 0.019%)(b)RoA方法(5×5,T = 1.83);(c)提出的多分辨率技术 基于s;(d)提出了基于d的多分辨率技术。
图16和图17分别显示了RoA方法,Touzi等人方法和所提出的多分辨率技术的阈值边缘图,该阈值边缘图分别针对斑点航空图像1和2的梯度幅度进行阈值化。对于图5(c)和(d)所示的测试图像,通过各种边缘检测方法检测到的边缘点的数量分别调整为分别等于大约15,000(图16)和10,000(图17)。图16(a)和17(a)分别示出了Pfa = 0.005%和0.01%的Touzi等人方法的边缘检测结果。通过这些小的Pfa值,乘法噪声的信号依赖性很小,并且可以准确地检测边界。在提出的基于y的多分辨率技术中[如图16(c)和17(c)所示]和ya [如图16(d)和(17(d)所示)],均匀区域中的伪边缘点出现的阈值图不会包含整体边界信息,所提出的技术的那些阈值结果说明,空间分辨率的像素选择不依赖于基础均值。
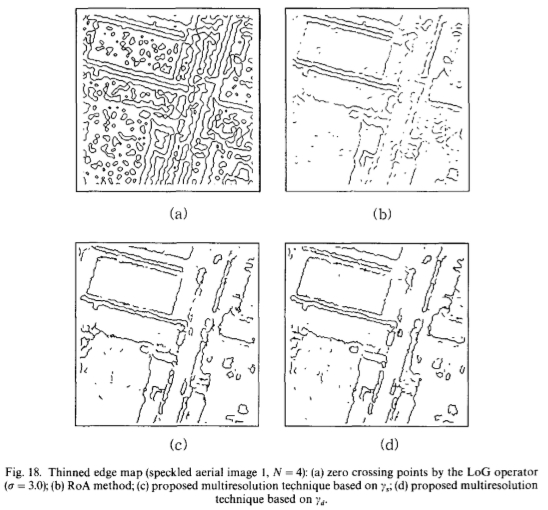
图18:细化边缘图(斑点图像1,N = 4);(a)LoG算子的零交叉点(= = 3.0)(b)RoA方法;(c)基于s的多分辨率技术;( d)建议在d上使用的多分辨率技术
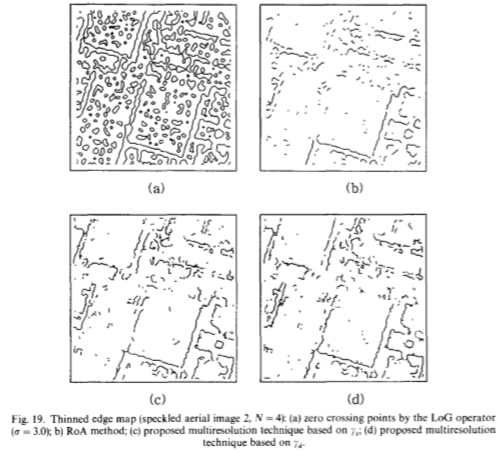
图19:细化边缘图(有斑点的航拍图像 2,N = 4:(a)通过LoG操作符的零交叉点(= = 3.0);(b)RoA方法;(c)基于s的多分辨率技术;( d)建议在d上使用的多分辨率技术
阈值图很厚,因此需要稀疏处理。 Touzi等人的方法使用了基于形态学的细化处理,这很难获得具有一个像素宽度的边缘图,因此将其从细化结果的比较中排除了。图16和17的稀化结果分别在图18和19中示出。在RoA方法中,通过在每个零交叉处应用RoA,或等效地,通过在RoA边缘图和通过LoG方法检测到的零交叉之间进行逻辑与运算,获得最终的边缘图。由于通过LoG方法的零交叉点具有一像素的宽度,因此逻辑AND操作会导致RoA边缘图变薄。但是,RoA边缘点和零交叉点之间的位置不正确有时会导致边缘信息丢失。图18(a)和19(a)分别示出了图5(c)和(d)的零交叉点。图18(b)和19(b)中稀疏的RoA结果是通过图16(b)和18(b),图17(b)和19(a)之间的逻辑与运算获得的。由于边缘点的位置不正确,短而断开的边缘会像沿边界的噪声一样出现,并且即使边缘点的幅度很大,也会丢失一些边缘点。提出的基于s和d的多分辨率技术在细化过程中使用了梯度大小和方向信息,这与常规的梯度方法相似。稀疏的结果显示在基于s的图18(c)和19(c)中,以及基于d的图18(d)和19(d)中。这些图很好地保留了边缘信息而不会丢失阈值映射中包含的边缘信息。
5 结论
本文提出了一种针对真实图像和嘈杂图像的多分辨率边缘检测技术,该技术会受到加性高斯噪声或斑点噪声的破坏。根据在(2p + 1)×(2p + 1)窗口上计算出的不连续性度量,将给定图像分为几个区域。不连续性度量确定像素是属于同质区域还是边缘区域。局部方差a用作无噪声图像和加性高斯噪声图像的边缘度度量,方差与均方之比s以及实际CDF与理论CDF之间的最大差d用于乘法噪声图像。基于不连续性度量以不同分辨率选择的每个区域都会显示与检测到的分辨率相关的边缘度信息,并且根据像素的分辨率将具有不同比例的边缘运算符应用于像素。
通过与常规方法的主观和定量比较显示了所提出技术的有效性。实验表明,该方法可以显着减少相对均匀区域中的虚假边缘,同时针对由加性高斯噪声或斑点噪声污染的嘈杂图像正确检测精细细节。所提出的按像素分辨率确定算法可以与具有适当不连续性度量的任何其他边缘检测技术相结合,从而产生各种多分辨率边缘检测技术。
致谢-这项研究得到了1991年韩国研究基金会非定向研究基金的部分支持。
参考文献
1. J.S.Lim,Two-Dimensional Signal and Image Processing, 476-494.Prentice-Hall,Englewood Clifs,New Jersey(1990).
2. D.Marr and E.Hildreth,Theory ofedge detection,Proc. R.Soc.London B-207,187-217(1980).
3. J.Canny.A computational approach to edge detection, IEEE Trans.Pattern Anal.Mach.Intell.PAMI-8,679-698(l986).
4. A.F.Korn,Toward a symbolic representation of intensity changes in images,IEEE Trans.Pattern Anal.Mach. Intell.PAMI-10,610-625(1988).
5. F.Bergholm,Edge focusing,IEEE Trans.Pattern Anal. Mach.Intell.PAMI-9,726-741(1987).
6. S.Tanimoto and T.Pavlidis,A hierarchical data structure for picture processing.Comput.Graphics Image Process. 4.104-119(1975).
7. A.Schrift,Y.Y.Zeevi and M.porat,Pyramidal edge detection and image representation,in SPIE Proc.Visual Communications and Image Processing 88 1001,529-536, Cambridge,Massachusetts(1988).
8. A.Rosenfeld,Ed.,Multiresolution Image Processing and Analysis.Springer-Verlag.Berlin,Germany(1984).
9. R.-H.Park and P.Meer,Edge-preserving artifact-free smoothing with image pyramids,Pattern Recognition Letters 12,467-475(1991).
10. P.Meer,R.-H.Park and K.Cho,Multiresolution adaptive image smoothing,CVG1P:Graphical Models Image Processing 56,140-148(1994).
11. J.W.Goodman,Statistical properties of laser speckle patterns.in Laser Speckle and Related Phenomena, J.C.Dainty,ed,9-75.Springer-Verlag.Berlin,Germany(1975).
12. R.Touzi,A.Lopes and P.Bousquet,A statistical and geometrical edge detector for SAR images,IEEE Trans. Geosci.Remote Sensing GRS-26,764-773(1988).
13. A.C.Bovik,On detecting edges in speckle imagery,IEEE Trans.Acoustics,Speech.Signal Processing ASSP-36. 1618-1627(1988).
14. R.Nevatia and K.R.Babu,Linear feature extraction and description.Comput.Graphics lmage Process.13.257-269(1980).
15. I.E.Abdou and W.K.Pratt,Quantitative design and evaluation of enhancement/thresholding edge detectors, Proc.JEEE 67,753-763(1979).
Image Processing and Analysis_8_Edge Detection:Multiresolution edge detection techniques ——1995的更多相关文章
- Image Processing and Analysis_8_Edge Detection: Optimal edge detection in two-dimensional images ——1996
此主要讨论图像处理与分析.虽然计算机视觉部分的有些内容比如特 征提取等也可以归结到图像分析中来,但鉴于它们与计算机视觉的紧密联系,以 及它们的出处,没有把它们纳入到图像处理与分析中来.同样,这里面也有 ...
- Image Processing and Analysis_8_Edge Detection:Statistical edge detection_ learning and evaluating edge cues——2003
此主要讨论图像处理与分析.虽然计算机视觉部分的有些内容比如特 征提取等也可以归结到图像分析中来,但鉴于它们与计算机视觉的紧密联系,以 及它们的出处,没有把它们纳入到图像处理与分析中来.同样,这里面也有 ...
- Image Processing and Analysis_8_Edge Detection:Edge and line oriented contour detection State of the art ——2011
此主要讨论图像处理与分析.虽然计算机视觉部分的有些内容比如特 征提取等也可以归结到图像分析中来,但鉴于它们与计算机视觉的紧密联系,以 及它们的出处,没有把它们纳入到图像处理与分析中来.同样,这里面也有 ...
- Image Processing and Analysis_8_Edge Detection:Edge Detection Revisited ——2004
此主要讨论图像处理与分析.虽然计算机视觉部分的有些内容比如特 征提取等也可以归结到图像分析中来,但鉴于它们与计算机视觉的紧密联系,以 及它们的出处,没有把它们纳入到图像处理与分析中来.同样,这里面也有 ...
- Image Processing and Analysis_8_Edge Detection:Scale-space and edge detection using anisotropic diffusion——1990
此主要讨论图像处理与分析.虽然计算机视觉部分的有些内容比如特 征提取等也可以归结到图像分析中来,但鉴于它们与计算机视觉的紧密联系,以 及它们的出处,没有把它们纳入到图像处理与分析中来.同样,这里面也有 ...
- Image Processing and Analysis_8_Edge Detection:A Computational Approach to Edge Detection——1986
此主要讨论图像处理与分析.虽然计算机视觉部分的有些内容比如特 征提取等也可以归结到图像分析中来,但鉴于它们与计算机视觉的紧密联系,以 及它们的出处,没有把它们纳入到图像处理与分析中来.同样,这里面也有 ...
- Image Processing and Analysis_8_Edge Detection:Theory of Edge Detection ——1980
此主要讨论图像处理与分析.虽然计算机视觉部分的有些内容比如特 征提取等也可以归结到图像分析中来,但鉴于它们与计算机视觉的紧密联系,以 及它们的出处,没有把它们纳入到图像处理与分析中来.同样,这里面也有 ...
- Image Processing and Analysis_8_Edge Detection:Local Scale Control for Edge Detection and Blur Estimation——1998
此主要讨论图像处理与分析.虽然计算机视觉部分的有些内容比如特 征提取等也可以归结到图像分析中来,但鉴于它们与计算机视觉的紧密联系,以 及它们的出处,没有把它们纳入到图像处理与分析中来.同样,这里面也有 ...
- Image Processing and Analysis_8_Edge Detection:Learning to Detect Natural Image Boundaries Using Local Brightness, Color, and Texture Cues ——2004
此主要讨论图像处理与分析.虽然计算机视觉部分的有些内容比如特 征提取等也可以归结到图像分析中来,但鉴于它们与计算机视觉的紧密联系,以 及它们的出处,没有把它们纳入到图像处理与分析中来.同样,这里面也有 ...
随机推荐
- CDH集群部署hive建表中文乱码
背景:部署CDH集群的 hive 服务,选用 mysql 作为 hive 元数据的存储数据库,通过 hive cli 建表时发现中文注释均乱码. 现象:hive端建表中文注释乱码. 定位: 已经确认过 ...
- Swift加载Xib创建的Controller
Xib显示如下: <注意箭头处即可> 按住Control键,点击Files'owner拖动到View即可. 加载该控制器如下: func registerClick() { let reg ...
- jenkins:集成sonar代码扫描+发送邮件
前提: Jenkins JDK 目录: 1.安装sonar插件:SonarQube Scanner for Jenkins 2.安装SonarQube 3.安装sonar-scanner ++++++ ...
- 重置fedora root密码
本方法适用于fedora16(含)以上(使用GRUB2) 步骤如下: Step 1:系统菜单,在linux上按“e”键进行编辑 Step 2:使用上下键找到以字符串“linux”或“linux16”( ...
- redis的安装和连接
- docker 运行pptpd服务器
今天试着用docker搭了一下pptpd服务器,感觉清爽不少(当然是踩坑之后的啦),特此记录. 使用的镜像: mmontagna/docker-vpn-pptp 由于是现成的镜像,所以我们 ...
- UWP 保存音乐或视频缩略图图片到本地
开发项目时,有时需要将本地媒体文件的缩略图保存到本地,下面是源码. 需要打开Package.appxmanifest 功能 图片库 访问权限. <Page x:Class="SaveB ...
- 安装sqlserver导致80端口被占用解决方法
安装sqlserver导致80端口被占用解决方法 系统占用的端口一般都是微软官方的产品占用的.所以这个时候主要考虑到几个服务: SQL Server导致.其中很有可能是SQL Server Repor ...
- C++目录
C++ lambda表达式 C++中如何设计一个类只能在堆或者栈上创建对象,面试题 C++之STL总结精华笔记 指针强制类型转换的理解 关于指针类型和指针类型转换的理解 C++继承种类 C++ 单例模 ...
- 基于TCP 协议的socket 简单通信
DNS 服务器:域名解析 socket 套接字 : socket 是处于应用层与传输层之间的抽象层,也是一组操作起来非常简单的接口(接受数据),此接口接受数据之后,交由操作系统 为什么存在 soc ...