相机IMU融合四部曲(三):MSF详细解读与使用
相机IMU融合四部曲(三):MSF详细解读与使用
极品巧克力
前言
通过前两篇文章,《D-LG-EKF详细解读》和《误差状态四元数详细解读》,已经把相机和IMU融合的理论全部都推导一遍了。而且《误差状态四元数》还对实际操作中的可能遇到的一些情况,进行指导。
这些理论都已经比较完整了,那么,该如何在实际当中操作呢?该如何用到实际产品中呢?误差状态四元数,是有开源的程序的,但是它是集成在rtslam( https://www.openrobots.org/wiki/rtslam/ )里面的,不方便提取出来使用。
但还有另外一个开源的程序,ETH的MSF(https://github.com/ethz-asl/ethzasl_msf),它是独立的一个开源程序,可以比较方便地用在自己的工程里面,并且它的理论与误差状态四元数很接近,稍微有点不同,所以MSF开源程序就成了一个不错的选择。
所以,我把MSF的程序全部都通读一遍之后,结合程序来推导MSF的理论,总结成本文,包括MSF的实验,与各位分享。
1.基本模型
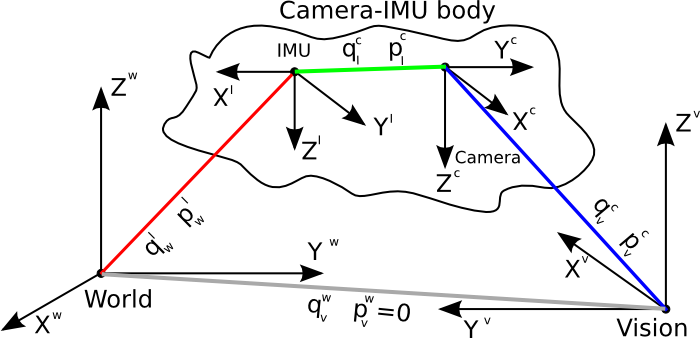
基本模型如下图所示。
MSF的可扩展性很好,程序里可以接入新的传感器,比如GPS,激光雷达,码盘等。
主要的理论还是误差状态四元数里面的理论。
相比于《卡尔曼四元数带外参融合方法》,它的方法更好。
首先,它的核心状态里面没有重力在世界坐标系下的表示。因为它用的就是《误差状态四元数》里面的5.3.1的方法,直接就是以水平坐标系为世界坐标系。只是初始位置根据当前加速度计的测量值和理论重力计算出来,初始位置 带着一个协方差而已。因为反正最后都是要转换到水平坐标系下的,所以这种方法反而更加方便。
带着一个协方差而已。因为反正最后都是要转换到水平坐标系下的,所以这种方法反而更加方便。
而且,IMU的世界坐标系和相机的世界坐标系,也不用绑在一起,同时建立。可以在IMU开启一小段时间以后,相机再获取它的世界坐标系。但相隔时间应该还是要尽量短点,因为位移单靠IMU的加速度计的积分,时间久了会很不准确,如果有轮子码盘的话,则又可以好一些。调整 的目的,可能是因为世界坐标系和相机的世界坐标系,在时间戳上并不对应得很好,所以需要微调。
的目的,可能是因为世界坐标系和相机的世界坐标系,在时间戳上并不对应得很好,所以需要微调。
或者,为了避免这样的麻烦,直接把IMU的世界坐标系和相机的世界坐标系,绑在一起,同时建立。这样子, 。
。
 也应该用ETH的手眼标定方法,借用棋盘格先标定好,再固定住。
也应该用ETH的手眼标定方法,借用棋盘格先标定好,再固定住。 就直接用尺子量好,固定住。如果用双目相机的话,就不用考虑
就直接用尺子量好,固定住。如果用双目相机的话,就不用考虑 了。
了。
(如果加上轮速计的话,怎么更新呢?它的作用与IMU是相同的,都是相对值,而不是绝对值。所以,它应该与IMU实时融合,在主状态与相机融合后,IMU预测出一个位姿态,轮速计预测出一个位姿,然后两者融合出主状态。只有主状态才能与相机位姿融合。融合的话,可以用误差状态的思想来融合。)
所以,参考《误差状态四元数详细解读》,一个简单鲁棒的IMU与相机融合的模型应该是这样的。
核心状态为, 。
。
核心状态上的扰动为, 。
。
运动模型跟《误差状态四元数》里面的一样,
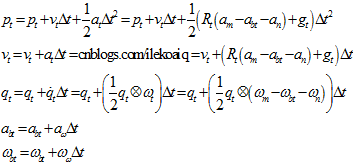
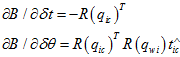
则相机位姿的观测方程为,
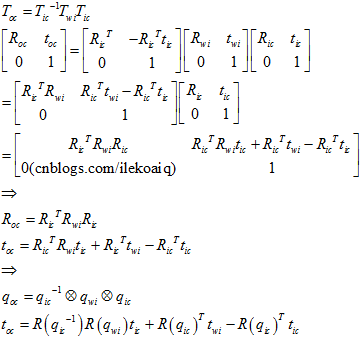
使用《误差状态四元数》里面的公式,
其中,

首先,要计算第一项关于 的雅克比,
的雅克比,

则用 表示上式,则雅克比计算如下,
表示上式,则雅克比计算如下,
然后,第二项, 要转成三个元素的形式,即角轴李代数的形式。
要转成三个元素的形式,即角轴李代数的形式。
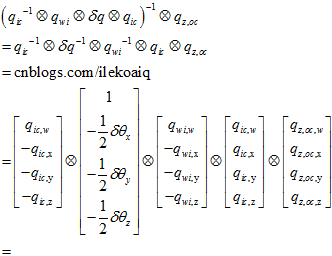
用matlab程序,解出上面的式子,以及关于 的雅克比。
的雅克比。
syms qicw qicx qicy qicz thetax thetay thetaz ...
qwiw qwix qwiy qwiz qzocw qzocx qzocy qzocz real
q1=[qicw,-qicx,-qicy,-qicz]';
q2=[1,-1/2*thetax,-1/2*thetay,-1/2*thetaz]';
q3=[qwiw,-qwix,-qwiy,-qwiz]';
q4=[qicw,qicx,qicy,qicz]';
q5=[qzocw,qzocx,qzocy,qzocz]';
temp = quaternion_mul(q1,q2);
temp = quaternion_mul(temp,q3);
temp = quaternion_mul(temp,q4);
temp = quaternion_mul(temp,q5);
temp
J=jacobian(2*temp(2:4,:),[thetax,thetay,thetaz])
simplify(J)
雅克比可以是,把temp转换成角轴,再关于 求导。或者,角轴直接近似等于temp向量部分的2倍,再关于
求导。或者,角轴直接近似等于temp向量部分的2倍,再关于 求导,像上面的matlab程序这样。
求导,像上面的matlab程序这样。
这样子计算虽然准确,但是太麻烦了。论文里还用了近似的方法。为了方便地求雅克比,认为测量值近似为预测值直接转换出来,即, 。
。
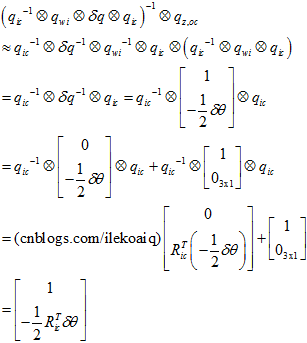
这时候,上式转换成角轴,就是,向量部分的2倍,即, 。所以,雅克比为,
。所以,雅克比为,

(这种用近似的方法,来算雅克比,虽然不如从原始公式上推导准确,但是可以极大地简化计算,也许可以给D-LG-EKF里面计算H矩阵时借鉴。)
所以,就得到了雅克比矩阵 。
。
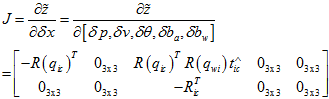
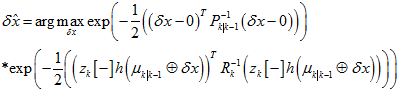
然后, 。就可以计算了。其余的流程,就跟《误差状态四元数》里面一样了。
。就可以计算了。其余的流程,就跟《误差状态四元数》里面一样了。
2.对延时的处理
前提条件是,各个传感器的时间戳得是同一个时间源的,或者,时间戳很稳定,可以通过一些方法把它们时间戳之间的对应关系找到。不同传感器的时间戳能准确对应上。
然后,因为测量值有时候会过一段时间才处理完,所以,把滤波中的状态都记录起来,然后,当有测量值过来的时候,更新对应时刻的状态。然后继续往后预测。如果有多个不同传感器的测量值,也是如此操作。
3.计算相对测量
如果要融合单目相机。考虑到单目尺度的情况,怕有时候尺度会突然发生变化。为了应对这种情况,就都计算相对测量,就是两个时刻之间的相对位姿态,这样子,这一段的尺度 就可以滤得比较准确。然后,再把优化后的值,加入到原来的状态中,方法跟《误差状态四元数》中的传播差不多,就是把新滤出来的这段位姿的均值和扰动,加到原先状态的均值和扰动中去,整合出新的均值和扰动。
就可以滤得比较准确。然后,再把优化后的值,加入到原来的状态中,方法跟《误差状态四元数》中的传播差不多,就是把新滤出来的这段位姿的均值和扰动,加到原先状态的均值和扰动中去,整合出新的均值和扰动。
而如果要融合的是轮子码盘的话,则不必用这样的方法。因为虽然轮子码盘也有尺度问题,但是尺度是较稳定的。
如果是双目相机的话,也不必考虑这种尺度突然变化的情况。
4.准确地计算每帧的协方差
为了更好地与GPS融合,就需要当前状态需要有准确的协方差。
而以前计算出来的相机位姿的协方差是不准确的,没有考虑到累积误差造成的影响。造成了与IMU融合后的状态协方差也是不准确的。得准确地计算出要融合的每帧图像的协方差。这协方差,就是通过全局BA的方法,计算出来的。
但其实为了简化。如果真的要与GPS融合的话。
在即时建图的情况下,用上一段的方法。但是视觉的误差累积还是很可观的,所以如果是远距离的话,应该以GPS为外界绝对测量,视觉只是用来计算相对测量的。只能用短距离的视觉相对测量。在主状态之后,以此为起点,视觉的相对测量值与IMU的相对测量值融合,融合出相对测量状态,再把相对状态的均值和扰动合并进主状态以及主状态扰动,主状态再与GPS融合,融合出新的主状态。融合的话,可以用误差状态的思想来融合。
如果已经提前建图,回环检测都做了,地图点固定且准确了,则视觉协方差就是当前帧的协方差,不必通过全局BA算出。
5. MSF方法总结
MSF的方法考虑得很全面,这个理论框架,可以用来融合多种传感器。
我上面思考出来的方法,还考虑了与轮速计码盘,GPS融合的具体操作情况,以后需要时再用。
6.实验与改进
MSF的安装与跑例程,可以参考这篇文章,
然后,我自己用ORBSLAM2跑Euroc的V201数据集,生成轨迹数据,和IMU数据一起送入到MSF中运行。为什么要跑标准数据集呢?因为标准数据集提供了IMU噪声的真实参数,可以直接拿来使用,而且有真实的轨迹,groundtruth,可以用来评价融合结果的好坏。
可是运行结果却总是发散,融合后的轨迹锯齿非常严重。可是在理论上来讲,它应该能取得比较好的效果的呀?所以猜测应该是程序与理论没有对应上。
只好从程序里去查问题的原因。将程序里的所有的计算过程与算法公式一一对应起来之后,最终发现,是由程序里的2个地方导致的。
1.MSF程序有个隐含的假设,即图像的世界坐标系是水平的。而我送的是以第一帧为世界坐标系的,而V201的第一帧并不是水平的。
2. 经过仔细推导程序的计算过程,发现MSF程序中的qwv,本质上是qvw,这个导致参数的初值给错了。
将以上两个问题改过来之后,MSF就可以正常运行我自己提供的数据了。
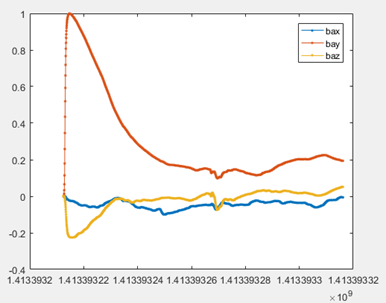
其中,在y轴上的结果如下。
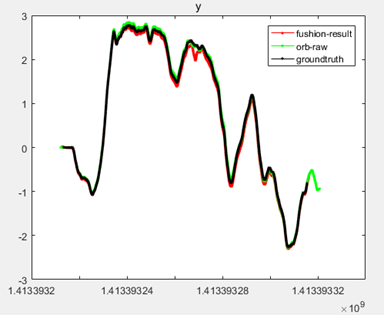
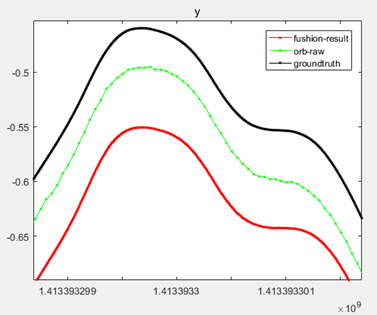
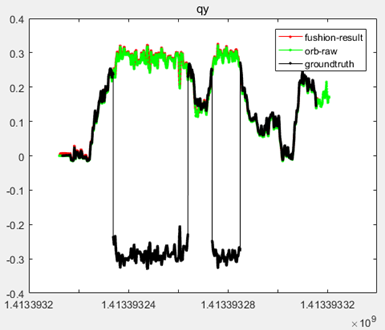
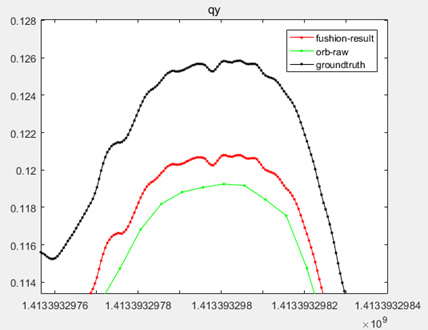
以上,黑色的线是真实值,绿色的线是ORBSLAM通过图像计算出来的位姿,红色的线是图像位姿和IMU融合后的结果,线上的每一个点都代表一个输出数据。可以看出,msf融合后的结果,不仅可以把位姿的输出频率提高到和IMU一样的频率,还可以让轨迹更加接近真实值。
但是,msf有一个缺点,那就是IMU的bias收敛得很慢,猜测是由于 近似造成的。如下图所示。
近似造成的。如下图所示。
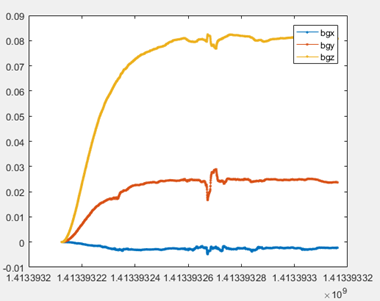
上图是加速度计的bias的收敛情况,和陀螺仪的bias的收敛情况。也许可以通过修改这部分的公式,让bias收敛得更快。
7.参考文献
- Lynen S, Achtelik M W, Weiss S, et al. A robust and modular multi-sensor fusion approach applied to MAV navigation[C]// Ieee/rsj International Conference on Intelligent Robots and Systems. IEEE, 2013:3923-3929.
相机IMU融合四部曲(三):MSF详细解读与使用的更多相关文章
- 相机IMU融合四部曲(一):D-LG-EKF详细解读
相机IMU融合四部曲(一):D-LG-EKF详细解读 极品巧克力 前言 前两篇文章<Google Cardbord的九轴融合算法>,<Madgwick算法详细解读>,讨论的都是 ...
- 相机IMU融合四部曲(二):误差状态四元数详细解读
相机IMU融合四部曲(二):误差状态四元数详细解读 极品巧克力 前言 上一篇文章,<D-LG-EKF详细解读>中,讲了理论上的SE3上相机和IMU融合的思想.但是,还没有涉及到实际的操作, ...
- 详细解读Volley(三)—— ImageLoader & NetworkImageView
ImageLoader是一个加载网络图片的封装类,其内部还是由ImageRequest来实现的.但因为源码中没有提供磁盘缓存的设置,所以咱们还需要去源码中进行修改,让我们可以更加自如的设定是否进行磁盘 ...
- VINS-mono详细解读
VINS-mono详细解读 极品巧克力 前言 Vins-mono是香港科技大学开源的一个VIO算法,https://github.com/HKUST-Aerial-Robotics/VINS-Mono ...
- Madgwick算法详细解读
Madgwick算法详细解读 极品巧克力 前言 接上一篇文章<Google Cardboard的九轴融合算法>. Madgwick算法是另外一种九轴融合的方法,广泛应用在旋翼飞行器上,效果 ...
- 相机-imu外参校准总结
1. 研究背景及相关工作 1)研究背景 单目视觉惯性slam是一种旨在跟踪移动平台的增量运动并使用来自单个车载摄像头和imu传感器的测量结果同时构建周围环境地图的技术.视觉相机和惯性测量单元(imu) ...
- SVO详细解读
SVO详细解读 极品巧克力 前言 接上一篇文章<深度滤波器详细解读>. SVO(Semi-Direct Monocular Visual Odometry)是苏黎世大学Scaramuzza ...
- MemCache超详细解读
MemCache是什么 MemCache是一个自由.源码开放.高性能.分布式的分布式内存对象缓存系统,用于动态Web应用以减轻数据库的负载.它通过在内存中缓存数据和对象来减少读取数据库的次数,从而提高 ...
- MemCache超详细解读 图
http://www.cnblogs.com/xrq730/p/4948707.html MemCache是什么 MemCache是一个自由.源码开放.高性能.分布式的分布式内存对象缓存系统,用于 ...
随机推荐
- 分享百度文件上传组件webUploader的使用demo
先创建DOM节点:<head ng-app="myApp"> <meta charset="UTF-8"> <title>& ...
- 轻量级封装DbUtils&Mybatis之三MyBatis分页
MyBatis假分页 参考DefaultResultSetHandler的skipRows方法. 温馨提示:部分代码请参考轻量级封装DbUtils&Mybatis之一概要 解决方案 1)之前公 ...
- 关于FPGA复位的认识
xilinx推荐尽量不复位,利用上电初始化,如果使用过程中需要复位,采用同步高复位. 如果逻辑工程较大,复位扇出会较多,会很影响时序,有以下常用方法: 复位信号按照不同时钟域分为rst0..rstn, ...
- spring扩展点之一:BeanFactoryPostProcessor和BeanPostProcessor
一.BeanFactoryPostProcessor和BeanPostProcessor的区别 BeanFactoryPostProcessor和BeanPostProcessor都是spring初始 ...
- Thread之六:线程创建方法
1.继承Thread类,重写该类的run()方法. 2.实现Runnable接口,并重写该接口的run()方法,该run()方法同样是线程执行体,创建Runnable实现类的实例,并以此实例作为Thr ...
- [转]Jsp 页面中的错误
1. Jsp 语法格式问题,导致其不能被翻译成 Servlet 源文件. 2. Jsp 翻译成 Servlet 源文件后出现的语法格式问题. 3. Jsp 翻译成 Servlet 后运行时发生异常.
- 如何实现查询显示N个工作日有效期内的数据
功能点分析:要显示N个工作日有效期内的数据,需要考虑: 1. 可以给每条数据增加一个有效期时间字段,查询时只显示有效期之前的数据,如有效期为七天,数据的创建时间是2014-07-21,那七个工作日有效 ...
- enq:TM-contention
enq:TM-contention 2011-08-04 15:55:17 分类: Linux 7.1 enq:TM-contention 执行dml期间,为防止对与dml相关的对象进 ...
- 查看Android内存,cpu
转自https://testerhome.com/topics/2583 一.查看内存 查看Android应用内存: adb shell dumpsys meminfo 1.查看详细的内存: adb ...
- [ Python ] Flask 基于 Web开发 大型程序的结构实例解析
作为一个编程入门新手,Flask是我接触到的第一个Web框架.想要深入学习,就从<FlaskWeb开发:基于Python的Web应用开发实战>这本书入手,本书由于是翻译过来的中文版,理解起 ...