C8051 PCA实现红外遥控接收
这里使用的处理器是C8051F005。红外接收头接处理器引脚,中断方式接收按键数据。
一 PCA介绍
1.1 PCA
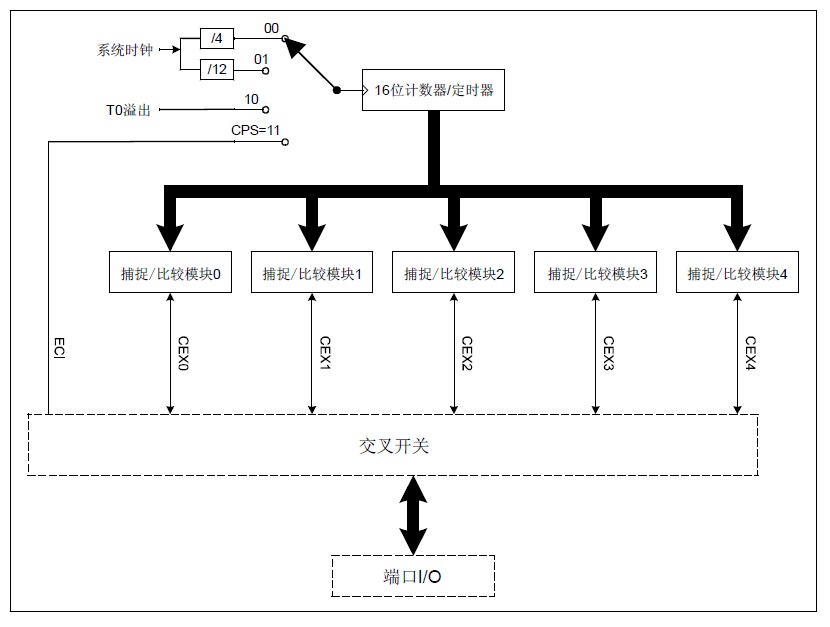
可编程计数器阵列(PCA)提供增强的定时器功能,与标准8051计数器/定时器相比,它需要较少的CPU干预。PCA包含一个专用的16位计数器/定时器和5个16位捕捉/比较模块。每个捕捉/比较模块有其自己的I/O线(CEXn)。当被允许时,I/O线通过交叉开关连到端口I/O。
计数器/定时器由一个可配置的时基信号驱动,可以在四个输入源中选择时基信号:系统时钟12分频、系统时钟4分频、定时器0溢出或ECI线上的外部时钟信号。对PCA的配置和控制是通过系统控制器的特殊功能寄存器来实现的。PCA的基本原理框图下图。
1.2 捕捉/比较模块
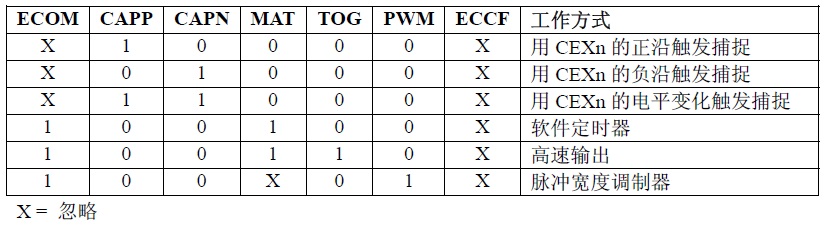
每个模块都可被配置为独立工作,有四种工作方式:边沿触发捕捉、软件定时器、高速输出和脉宽调制器。每个模块在CIP-51系统控制器中都有属于自己的特殊功能寄存器(SFR)。这些寄存器用于配置模块的工作方式和与模块交换数据。
PCA0CPMn寄存器用于配置PCA捕捉/比较模块的工作方式,下表概述了模块工作在不同方式时该寄存器各位的设置情况。置‘1’ PCA0CPMn寄存器中的ECCFn位将允许模块的CCFn中断。
注意:要使单独的CCFn中断得到响应,必须先整体允许PCA0中断。通过将EA位(IE.7)和EPCA0位(EIE1.3)设置为逻辑1来整体允许PCA0中断。
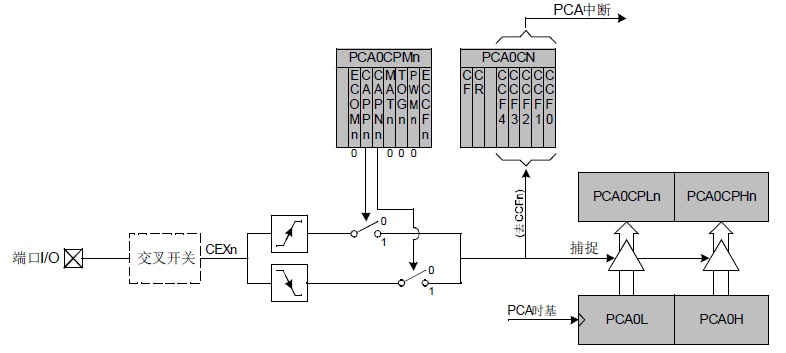
1.3 边沿触发的捕捉方式
在该方式,CEXn引脚上出现的有效电平变化导致PCA捕捉PCA计数器/定时器的值并将其装入到对应模块的16位捕捉/比较寄存器(PCA0CPLn和PCA0CPHn)。
PCA0CPMn寄存器中的CAPNn位用于选择触发捕捉的电平变化类型:低电平到高电平(正沿)、高电平到低电平(负沿)或任何变化(正沿或负沿)。
当捕捉发生时,PCA0CN中的捕捉/比较标志(CCFn)被置为逻辑1并产生一个中断请求(如果CCF中断被允许)。
当CPU转向中断服务程序时,CCFn位不能被硬件自动清除,必须用软件清0。
二、红外编码
2.1数据格式
数据格式包括了引导码、用户码、数据码和数据码反码,编码总占32 位。数据反码是数据码反相后的编码,编码时可用于对数据的纠错。注意:第二段的用户码也可以在遥控应用电路中被设置成第一段用户码的反码。

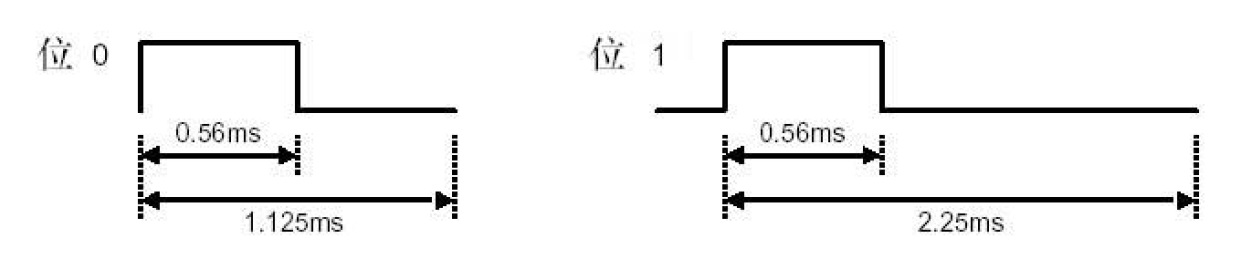
2.2位定义
用户码或数据码中的每一个位可以是位‘1’,也可以是位‘0’。区分‘0’和‘1’是利用脉冲的时间间隔来区分,这种编码方式称为脉冲位置调制方式,英文简写PPM。
这里只介绍了红外的一些简单的知识,还有其他重复码等知识自行学习。
三、实现
3.1 准备
由于项目中的红外遥控器是定制的,首先用示波器观测下某一按键的波形图。
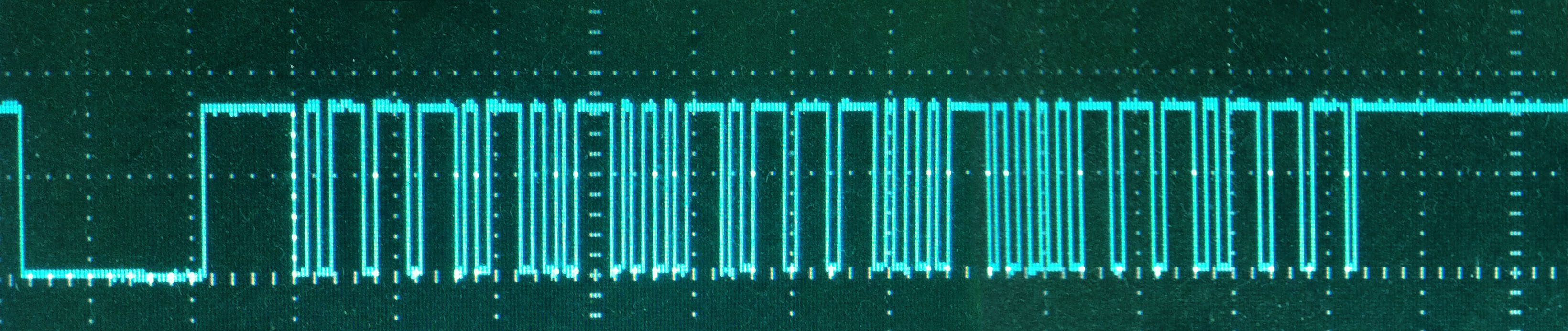
从图中可知,去除掉起始码,我们可以定义高电平短的是逻辑0,,高电平长点的是逻辑1。这样读到的32位数据为0111 0100 1000 1011 1000 1000 0111 0111
数据的分析:两两一组,一共四组。第一组是第二组的反码;第三组是第四组的反码。
3.2 软件实现
#define _9ms_val 0x40CC //9ms
#define _9ms_min 0x3900 //8.5ms
#define _9ms_max 0x4466 //9.5ms
#define _45ms_val 0x2066 //4.5ms
#define _45ms_min 0x1CCC //4ms
#define _45ms_max 0x2400 //5ms
#define _56ms_val 0x408 //0.56ms
#define _56ms_min 0x34F //0.46ms
#define _56ms_max 0x4C0 //0.66ms
#define _169ms_val 0xC2B //1.69ms
#define _169ms_min 0xACC //1.5ms
#define _169ms_max 0xC87 //1.74ms
#define _225ms_val 0x1033 //2.25ms
#define _225ms_min 0xE66 //2ms
#define _225ms_max 0x1200 //2.5ms
#define posedge 0x21 //正沿捕捉功能使能
#define engedge 0x11 //负沿捕捉功能使能
define
上面一部分的时间是这样算出来的,系统采用的时钟是22.1184MHz。在下面的初始化中,PCA使用的是系统时钟的十二分之一,即是1.8432MHz。拿9ms作说明,
得出 x=16588.8 ,转换成16进制数就是 0x40CC。
最后两个宏参照图2得来,捕捉上升沿还是下降沿。
void init_pca(void) {
EIE1 |= 0x08; //允许PCA0的中断请求
PCA0MD = 0x1; //系统时钟的12分频 CF 中断
PCA0CN = 0x0;
PCA0CPM0 = 0x0;
PCA0CPM0 = engedge;
PCA0L = 0x0;
PCA0H = 0x0;
conut = 0x0;
state = 0x0;
rep_fg = ;
}
初始化
初始化完成对变量的初始化,以及首先捕获下降沿。
#ifdef eclipse
void PCA0_ISR(void) /* 可编程计数器阵列0 */
#else
void PCA0_ISR (void) interrupt EPCA0_VECTOR /* 可编程计数器阵列0 */
#endif
{
EA = ;
switch (state) {
case 0x0: //开始第一个下降沿
PCA0L = PCA0H = 0x0;
CR = ; //允许PCA计数器
PCA0CPM0 = posedge; //设置捕获高电平
conut = 0x0;
state = 0x1;
break;
/*----------------------------------------------------------------------------*/
case 0x1: //低电平宽度 9ms
CR = ;
TIM_L_VAL.c[] = PCA0CPL0;
TIM_L_VAL.c[] = PCA0CPH0;
PCA0L = PCA0H = 0x0;
PCA0CPM0 = engedge; //设置捕获低电平
if ((TIM_L_VAL.i > _9ms_min) && (TIM_L_VAL.i < _9ms_max)) { //9ms比较
CR = ;
state = 0x2;
} else
state = 0x0; //不是9ms脉冲
break;
/*----------------------------------------------------------------------------*/
case 0x2: //高电平宽度 4.5ms 2.25
TIM_H_VAL.c[] = PCA0CPL0;
TIM_H_VAL.c[] = PCA0CPH0;
CR = ;
PCA0L = PCA0H = 0x0;
conut = 0x0;
if ((TIM_H_VAL.i > _45ms_min) && (TIM_H_VAL.i < _45ms_max)) //4.5ms比较
{
PCA0CPM0 = posedge; //设置捕获高电平
CR = ;
state = 0x3;
} else {
if ((TIM_H_VAL.i > _225ms_min) && (TIM_H_VAL.i < _225ms_max)) //2.25ms比较
{
PCA0CPM0 = posedge; //设置捕获高电平
CR = ;
rep_fg = ; //重发标志
state = 0x3;
} else //干扰信号,重新开始
{
PCA0CPM0 = engedge; //设置捕获低电平
state = 0x0;
}
}
break;
/*----------------------------------------------------------------------------*/
case 0x3: //低电平宽度 0.56ms
TIM_L_VAL.c[] = PCA0CPL0;
TIM_L_VAL.c[] = PCA0CPH0;
CR = ;
PCA0L = PCA0H = 0x0;
PCA0CPM0 = engedge;
if (conut == ) {
if ((key.c[] == ~key.c[]) && (key.c[] == ~key.c[])
&& (key.c[] == use_code)) {
key_code = key.c[];
key_bit = ;
isr_send_signal(DIS_Handle);
}
conut = 0x0;
state = 0x0;
} else {
if ((TIM_L_VAL.i > _56ms_min) && (TIM_L_VAL.i < _56ms_max)) //0.56ms比较
{
if (rep_fg) {
state = 0x0; //重发码
rep_fg = ;
//isr_send_signal(DIS_Handle);
} else {
CR = ;
state = 0x4;
}
} else
state = 0x0;
}
break;
/*----------------------------------------------------------------------------*/
case 0x4: //高电平宽度
TIM_H_VAL.c[] = PCA0CPL0;
TIM_H_VAL.c[] = PCA0CPH0;
CR = ;
PCA0L = PCA0H = 0x0;
key.l = key.l >> ;
if ((TIM_H_VAL.i > _169ms_min) && (TIM_H_VAL.i < _169ms_max))//1.69ms比较
key.l |= 0x80000000;
if ((TIM_H_VAL.i > _56ms_min) && (TIM_H_VAL.i < _56ms_max)) //0.56ms比较
key.l &= ~0x80000000;
CR = ;
PCA0CPM0 = posedge; //设置捕获高电平
state = 0x3;
conut++;
break;
/*----------------------------------------------------------------------------*/
default:
CR = ;
PCA0L = PCA0H = 0x0;
PCA0CPM0 = engedge;
state = 0x0;
break;
/*----------------------------------------------------------------------------*/
}
CCF0 = ;
EA = ;
}
实现部分
状态0产生后,开始计数,并设置捕获上升沿。捕获到上升沿,进入到状态1,分析是否是9ms。
状态3和状态4是核心部分,接收32位有效数据,并且判断是否有效。当为有效按键时,会发送一个信号,显示任务会等待这个信号。
代码的第92行到第96行,接收位的处理,先接收到的位存储在字节的最低位。
总的来说,根据波形合理的设置捕获方式,判断起始码,接收32位数据。
C8051 PCA实现红外遥控接收的更多相关文章
- 玩转X-CTR100 l STM32F4 l 红外遥控接收
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] X-CTR100控制器具有红外接收头,例程 ...
- 红外遥控接收发射原理及ESP8266实现
红外遥控是利用近红外光进行数据传输的一种控制方式.近红外光波长0.76um~1.5um ,红外遥控收发器件波长一般为 0.8um~0.94um ,具有传输效率高,成本低,电路实现简单,抗干扰强等特点, ...
- GP1UM26(78)1RK远程红外遥控接收IC数据手册学习
1.Features 该系列IC具有多种BMP带通频率可供选择,典型的GP1UM261RK带通频率为38KHz,内部的前置放大器等放大电路工作频率均为38KHz. Compact紧凑型,体积小 2.i ...
- 基于Arduino、STM32进行红外遥控信号接收
catalogue . 遥控器原理简介 . 红外遥控原理 . 常见红外遥控器红外线信号传输协议 . 遙控器的发展 . 实验过程 . 攻击面 . 基于STM32实现红外信号解码 1. 遥控器原理简介 0 ...
- arduino红外遥控库IRremote的IRsend类sendRaw函数溢出问题及其解决方法
最近在调试红外遥控格力空调,在论坛中学到了不少东西.参考: (1)<解决问题系列(4)——红外编码分析利器使用> (2)<315Mhz模块传输替代315Mhz遥控器> 调试环境 ...
- 51单片机tea5767收音机 红外遥控 自动搜台 存台 DIY
先看效果图: 显示 频道CH , 频率 100.0Mhz 欢迎信息,1602 内置日文平假名, 正好用来显示博主名称. 焊接前,已经万能面包板上试验成功. 焊接完成以后,1602 的D0 - D7 接 ...
- 红外遥控NEC协议使用总结
最近做了一个调试红外遥控三色灯的实习,花了一个多月的时间研究基于NEC协议的红外遥控,下面是这次实习技术方面的总结. 一.NEC协议特征: 8位地址和8位命令长度 每次传输两遍地址(用户码)和命令(按 ...
- Arduino红外遥控系列教程2013——红外转码
教程三:红外转码教程——用电视遥控器取代机顶盒遥控器 前言前段时间看到了使用红外遥控的X-Bot机器人[链接],感觉很有意思.最近开始玩Arduino与红外,一方面打算将来用于BOXZ的之间的通讯控制 ...
- 基于FPGA的红外遥控解码与PC串口通信
基于FPGA的红外遥控解码与PC串口通信 zouxy09@qq.com http://blog.csdn.net/zouxy09 这是我的<电子设计EDA>的课程设计作业(呵呵,这个月都拿 ...
随机推荐
- 小觑数据库(SqlServer)查询语句执行过程
近年来,越来越多的NoSql产品不断的以技术革命的者的身份跳出来:“你看哥是多么的快,你们关型型数据库真是战五渣阿”.是的,高性能的场景下NoSql真的很出彩.而我们关系型数据库只能在墙角哭泣&quo ...
- [C++] socket -8 [命名管道]
::命名管道不但能实现同一台机器上两个进程通信,还能在网络中不同机器上的两个进程之间的通信机制.与邮槽不同,命名管道是采用基于连接并且可靠的传输方式,所以命名管道传输数据只能一对一进行传输. /* 命 ...
- H5 Canvas刮刮乐
玩游戏的人 很多时候都会遇到翻牌子 开宝箱. 总有人傻傻的在哪里还纠结很久到底点哪一个! 纠结 指不定翻哪一个会多一点,你明明看到那个卡片的奖项多 . 那我就告诉你好了 其实很多时候在你点开那个 ...
- Windows环境下32位汇编语言程序设计(典藏版)
Windows环境下32位汇编语言程序设计(典藏版)(含CD光盘1张)(年,经典再现!) 罗云彬 著 ISBN 978-7-121-20759-4 2013年7月出版 定价:99.00元 756页 1 ...
- PowerDesigner建表
SQL: --建表 --管理人员表 admin --drop table WPADMIN cascade constraints; /*================================ ...
- Linux内核启动分析过程-《Linux内核分析》week3作业
环境搭建 环境的搭建参考课件,主要就是编译内核源码和生成镜像 start_kernel 从start_kernel开始,才真正进入了Linux内核的启动过程.我们可以把start_kernel看做平时 ...
- 解决安卓SDK更新连不通问题
http://wenku.baidu.com/link?url=d7t81OFF4_o2YF9iBne-azyovROGPGOozMgWKNyAIQK8vtI0mIjvzpfdOXg7KOobu202 ...
- android: 文件存储
数据持久化就是指将那些内存中的瞬时数据保存到存储设备中,保证即使在手机或电脑 关机的情况下,这些数据仍然不会丢失.保存在内存中的数据是处于瞬时状态的,而保存在 存储设备中的数据是处于持久状态的,持久化 ...
- 不会用ant打包、部署项目的工程师,不是一个好程序员(测试)
副标题:利用ant脚本 自动构建svn增量/全量 系统程序升级包 首先请允许我这样说,作为开发或测试,你一定要具备这种本领.你可以手动打包.部署你的工程,但这不是最好的方法.最好的方式就是全自动化的方 ...
- js弹出放大图
<script type="text/javascript"> function openpic(url){ OpenWindow = window.open(&quo ...