IoU与非极大值抑制(NMS)的理解与实现
1. IoU(区域交并比)
计算IoU的公式如下图,可以看到IoU是一个比值,即交并比。
在分子中,我们计算预测框和ground-truth之间的重叠区域;
分母是并集区域,或者更简单地说,是预测框和ground-truth所包含的总区域。
重叠区域和并集区域的比值,就是IoU。

1.1 为什么使用IoU来评估目标检测器
与分类任务不同,我们预测的bounding box的坐标需要去匹配ground-truth的坐标,而坐标完全匹配基本是不现实的。因此,我们需要定义一个评估指标,奖励那些与ground-truth匹配较好(重叠较大)的预测框。
1.2 IoU的python实现
def bb_intersection_over_union(boxA, boxB):
# determine the (x, y)-coordinates of the intersection rectangle
# 画个图会很明显,x左、y上取大的,x右、y下取小的,刚好对应交集
xA = max(boxA[0], boxB[0])
yA = max(boxA[1], boxB[1])
xB = min(boxA[2], boxB[2])
yB = min(boxA[3], boxB[3])
# compute the area of intersection rectangle
# 计算交集部分面积
interArea = max(0, xB - xA + 1) * max(0, yB - yA + 1)
# compute the area of both the prediction and ground-truth rectangles
# 计算预测值和真实值的面积
boxAArea = (boxA[2] - boxA[0] + 1) * (boxA[3] - boxA[1] + 1)
boxBArea = (boxB[2] - boxB[0] + 1) * (boxB[3] - boxB[1] + 1)
# compute the intersection over union by taking the intersection
# area and dividing it by the sum of prediction + ground-truth
# areas - the interesection area
# 计算IoU,即 交/(A+B-交)
iou = interArea / float(boxAArea + boxBArea - interArea)
# return the intersection over union value
return iou
2. 非极大化抑制(NMS)
2.1 算法思想
所谓非极大值抑制:先假设有6个输出的矩形框(即proposal_clip_box),根据分类器类别分类概率做排序,从小到大分别属于车辆的概率(scores)分别为A、B、C、D、E、F。
(1)从最大概率矩形框F开始,分别判断A~E与F的重叠度IOU是否大于某个设定的阈值;
(2)假设B、D与F的重叠度超过阈值,那么就扔掉B、D;并标记第一个矩形框F,是我们保留下来的。
(3)从剩下的矩形框A、C、E中,选择概率最大的E,然后判断E与A、C的重叠度,重叠度大于一定的阈值,那么就扔掉;并标记E是我们保留下来的第二个矩形框。
就这样一直重复,找到所有被保留下来的矩形框。
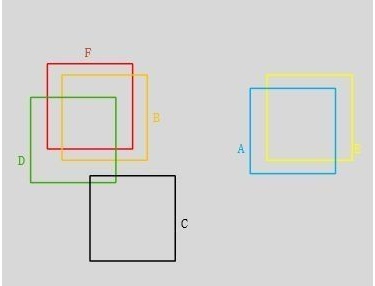
如上图F与BD重合度较大,可以去除BD。AE重合度较大,我们删除A,保留scores较大的E。C和其他重叠都小保留C。最终留下了C、E、F三个。
2.2 python实现
1.无条件保留置信度最高的框;
2.删除与保留框IOU大于阈值的候选框;
# --------------------------------------------------------
# Fast R-CNN
# Copyright (c) 2015 Microsoft
# Licensed under The MIT License [see LICENSE for details]
# Written by Ross Girshick
# -------------------------------------------------------- import numpy as np def py_cpu_nms(dets, thresh):
"""Pure Python NMS baseline."""
x1 = dets[:, 0]
y1 = dets[:, 1]
x2 = dets[:, 2]
y2 = dets[:, 3]
scores = dets[:, 4] areas = (x2 - x1 + 1) * (y2 - y1 + 1)
order = scores.argsort()[::-1] keep = []
while order.size > 0:
i = order[0]
keep.append(i)
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]]) w = np.maximum(0.0, xx2 - xx1 + 1)
h = np.maximum(0.0, yy2 - yy1 + 1)
inter = w * h
ovr = inter / (areas[i] + areas[order[1:]] - inter) inds = np.where(ovr <= thresh)[0]
order = order[inds + 1] return keep
3. soft-NMS
soft NMS提出尤其对密集物体检测的检测效果有一定的提升作用
绝大部分目标检测方法,最后都要用到 NMS-非极大值抑制进行后处理。 通常的做法是将检测框按得分排序,然后保留得分最高的框,同时删除与该框重叠面积大于一定比例的其它框。
这种贪心式方法存在如下图所示的问题: 红色框和绿色框是当前的检测结果,二者的得分分别是0.95和0.80。如果按照传统的NMS进行处理,首先选中得分最高的红色框,然后绿色框就会因为与之重叠面积过大而被删掉。
另一方面,NMS的阈值也不太容易确定,设小了会出现下图的情况(绿色框因为和红色框重叠面积较大而被删掉),设置过高又容易增大误检。

soft NMS算法的大致思路为:M为当前得分最高框,bi 为待处理框,bi 和M的IOU越大,bi 的得分si 就下降的越厉害。
算法结构如图所示:
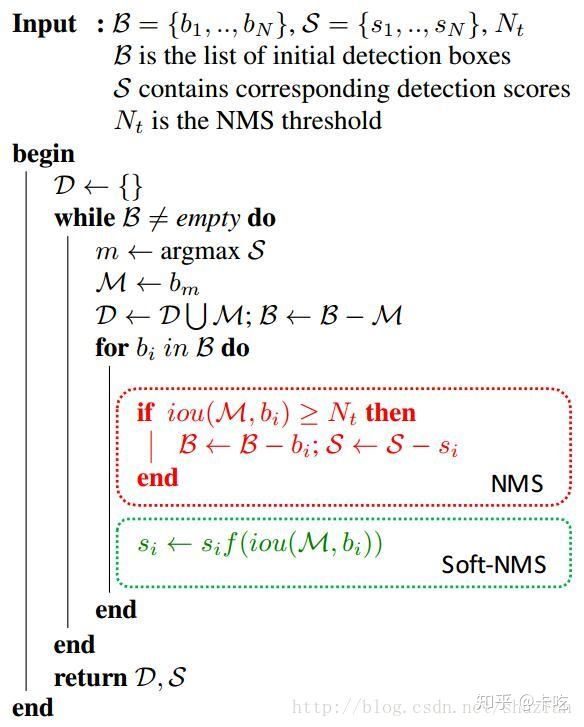
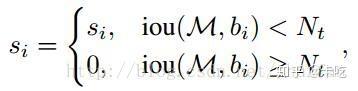
NMS中:
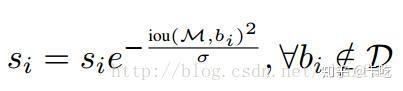
soft NMS中:
(1)线性加权:

(2)高斯加权:
soft NMS仍然有问题:其阈值仍然需要手工设定
soft nms 代码实现:
# coding:utf-8
import numpy as np
def soft_nms(boxes, sigma=0.5, Nt=0.1, threshold=0.001, method=1):
N = boxes.shape[0]
pos = 0
maxscore = 0
maxpos = 0 for i in range(N):
maxscore = boxes[i, 4]
maxpos = i tx1 = boxes[i,0]
ty1 = boxes[i,1]
tx2 = boxes[i,2]
ty2 = boxes[i,3]
ts = boxes[i,4] pos = i + 1
# get max box
while pos < N:
if maxscore < boxes[pos, 4]:
maxscore = boxes[pos, 4]
maxpos = pos
pos = pos + 1 # add max box as a detection
boxes[i,0] = boxes[maxpos,0]
boxes[i,1] = boxes[maxpos,1]
boxes[i,2] = boxes[maxpos,2]
boxes[i,3] = boxes[maxpos,3]
boxes[i,4] = boxes[maxpos,4] # swap ith box with position of max box
boxes[maxpos,0] = tx1
boxes[maxpos,1] = ty1
boxes[maxpos,2] = tx2
boxes[maxpos,3] = ty2
boxes[maxpos,4] = ts tx1 = boxes[i,0]
ty1 = boxes[i,1]
tx2 = boxes[i,2]
ty2 = boxes[i,3]
ts = boxes[i,4] pos = i + 1
# NMS iterations, note that N changes if detection boxes fall below threshold
while pos < N:
x1 = boxes[pos, 0]
y1 = boxes[pos, 1]
x2 = boxes[pos, 2]
y2 = boxes[pos, 3]
s = boxes[pos, 4] area = (x2 - x1 + 1) * (y2 - y1 + 1)
iw = (min(tx2, x2) - max(tx1, x1) + 1)
if iw > 0:
ih = (min(ty2, y2) - max(ty1, y1) + 1)
if ih > 0:
ua = float((tx2 - tx1 + 1) * (ty2 - ty1 + 1) + area - iw * ih)
ov = iw * ih / ua #iou between max box and detection box if method == 1: # linear
if ov > Nt:
weight = 1 - ov
else:
weight = 1
elif method == 2: # gaussian
weight = np.exp(-(ov * ov)/sigma)
else: # original NMS
if ov > Nt:
weight = 0
else:
weight = 1 boxes[pos, 4] = weight*boxes[pos, 4]
print(boxes[:, 4]) # if box score falls below threshold, discard the box by swapping with last box
# update N
if boxes[pos, 4] < threshold:
boxes[pos,0] = boxes[N-1, 0]
boxes[pos,1] = boxes[N-1, 1]
boxes[pos,2] = boxes[N-1, 2]
boxes[pos,3] = boxes[N-1, 3]
boxes[pos,4] = boxes[N-1, 4]
N = N - 1
pos = pos - 1 pos = pos + 1
keep = [i for i in range(N)]
return keep
boxes = np.array([[100, 100, 150, 168, 0.63],[166, 70, 312, 190, 0.55],[221, 250, 389, 500, 0.79],[12, 190, 300, 399, 0.9],[28, 130, 134, 302, 0.3]])
keep = soft_nms(boxes)
print(keep)
参考链接:
https://zhuanlan.zhihu.com/p/47189358
https://zhuanlan.zhihu.com/p/70768666
https://blog.csdn.net/leviopku/article/details/80886386
IoU与非极大值抑制(NMS)的理解与实现的更多相关文章
- IOU和非极大值抑制
如何判断对象检测算法运作良好呢? 一.交并比(Intersection over union,IoU) 是产生的候选框(candidate bound)与原标记框(ground truth bound ...
- 第二十七节,IOU和非极大值抑制
你如何判断对象检测算法运作良好呢?在这一节中,你将了解到并交比函数,可以用来评价对象检测算法. 一 并交比(Intersection over union ) 在对象检测任务中,你希望能够同时定位对象 ...
- 非极大值抑制(NMS)
非极大值抑制顾名思义就是抑制不是极大值的元素,搜索局部的极大值.这个局部代表的是一个邻域,邻域有两个参数可变,一个是邻域的维数,二是邻域的大小.这里不讨论通用的NMS算法,而是用于在目标检测中提取分数 ...
- pytorch实现yolov3(4) 非极大值抑制nms
在上一篇里我们实现了forward函数.得到了prediction.此时预测出了特别多的box以及各种class probability,现在我们要从中过滤出我们最终的预测box. 理解了yolov3 ...
- 非极大值抑制(Non-Maximum Suppression,NMS)
概述 非极大值抑制(Non-Maximum Suppression,NMS),顾名思义就是抑制不是极大值的元素,可以理解为局部最大搜索.这个局部代表的是一个邻域,邻域有两个参数可变,一是邻域的维数,二 ...
- 目标检测 非极大值抑制(Non-Maximum Suppression,NMS)
非极大值抑制(Non-Maximum Suppression,NMS),顾名思义就是抑制不是极大值的元素,可以理解为局部最大搜索.也可以理解为只取置信度最高的一个识别结果. 举例:  如图所示,现在 ...
- 非极大值抑制(NMS)
转自:https://www.cnblogs.com/makefile/p/nms.html 概述 非极大值抑制(Non-Maximum Suppression,NMS),顾名思义就是抑制不是极大值的 ...
- 非极大值抑制Non-Maximum Suppression(NMS)
非极大值抑制(Non-Maximum Suppression,NMS) 概述 非极大值抑制(Non-Maximum Suppression,NMS),顾名思义就是抑制不是极大值的元素,可以理解为局 ...
- Non-Maximum Suppression,NMS非极大值抑制
Non-Maximum Suppression,NMS非极大值抑制概述非极大值抑制(Non-Maximum Suppression,NMS),顾名思义就是抑制不是极大值的元素,可以理解为局部最大搜索. ...
随机推荐
- [LeetCode] 74. Search a 2D Matrix 搜索一个二维矩阵
Write an efficient algorithm that searches for a value in an m x n matrix. This matrix has the follo ...
- centos7 安装mysql5.7(二进制安装)
一.卸载默认安装的mariadb [root@localhost ~]# yum remove mariadb* -y 二.添加mysql用户 [root@localhost ~]# useradd ...
- 《Interest Rate Risk Modeling》阅读笔记——第四章:M-absolute 和 M-square 风险度量
目录 第四章:M-absolute 和 M-square 风险度量 思维导图 两个重要不等式的推导 关于 \(M^A\) 的不等式 关于 \(M^2\) 的不等式 凸性效应(CE)和风险效应(RE)的 ...
- hbase 待看代码
flush split mvcc rpc get put mutation netty reactor模型 page cache 缓存 I/O 又被称作标准 I/O,大多数文件系统的默认 I/O 操 ...
- C# SqlServer Ado.net参数化查询插入null数据
DateTime? dt=null; if (dt.HasValue) { cmd.Parameters.AddWithValue("@CreateDateTime", dt); ...
- cmd命令和linux命令的区别
cmd命令和linux命令看起来很相似,都是在一个控制台输入一些特定的指令去完成一些特定的操作.可是用过的朋友就会发现这些指令是有很多不同的,可是到底有什么不同,要说又说不上来,所以要了解一下. cm ...
- Java如何执行操作系统的CMD命令行
在模拟cmd调用Python时遇到一些情况,这类问题可以归类为"超时,阻塞"等,问题原因: Process p=Runtime.getRuntime().exec(String[] ...
- VUE面刷新
1.这种方法页面会一瞬间的白屏 ) 2.这种也是一样,画面一闪 location.reload() 3.搭配provide.inject使用 首先在主页面 app.vue 设置: <keep-a ...
- webform 的路由
webform是怎么通过url找到对应handler的呢? mvc 和webapi的路由都是通过注册到RouteTable.Routes中,然后在urlroutingmodule中路由到对应route ...
- Filco圣手二代双模蓝牙机械键盘的连接方法
常规方法 确认键盘的电源接通. 同时按下「Ctrl」+「Alt」+「Fn」执行装置切换模式.配对LED灯(蓝)和低电量显示LED灯(红)约同时亮10秒左右. 想移除已登录的装置时,请从「蓝牙装置登录/ ...