CF1578I Interactive Rays:ICPC WF Moscow Invitational Contest I 题解
题意简述:在平面上有一个坐标 \((x_c,y_c)\) 和半径 \(r\) 都是整数的圆 \((1\leq r_c\leq \sqrt{x_c^2+y_c^2}-1)\),你可以询问不超过 \(60\) 次一个从原点出发的射线 \((0,0)\to (x,y)\) 与圆的距离(若相交,则返回 \(0\))。确定圆的坐标和半径。
\(|x_c|,|y_c|,r\le 10^5\),你需要保证 \(|x|,|y|\leq 10^6\)。
一道有趣的计算几何,思维含量并不是很高(*3300 有点离谱),就是写起来麻烦了些。比赛的时候花了四个小时写这题,结果发现前面两个半小时写的东西完全没有用(狂笑)。
Step 1:旋转坐标轴规避分类讨论
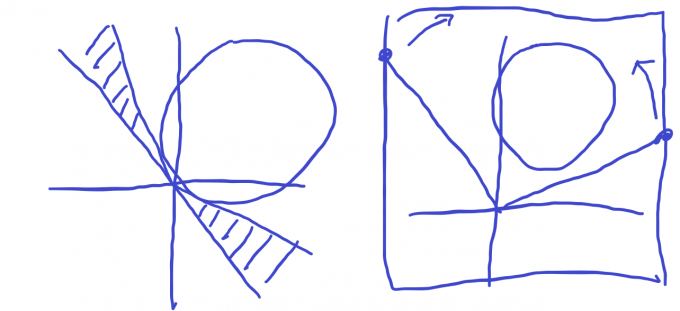
首先我们得确定这个圆的大致位置,也就是在哪个象限。因为如果对于四个象限分别分类讨论很麻烦,不如旋转坐标轴使得这个圆落在某些固定的象限,每次旋转 \(90^{\circ}\)。不妨将圆心旋转到 \(x\) 轴上方,且确保这个圆不经过第三象限,这是可以同时做到的:
我们可以通过询问 \((0,\pm i)\) 与 \((\pm i,0)\) 来确定圆和坐标轴是否有交。
- 若没有交点,将坐标轴旋转使得圆落在第一象限。
- 若有一个交点,将坐标轴旋转使得圆落在第一、二象限。
- 若有两个交点,将坐标轴旋转使得圆落在第一、二、四象限。
不要忘了旋转后询问要转回来。比如我们将坐标轴顺时针旋转 \(90^{\circ}\) 后,询问时需要将坐标逆时针旋转 \(90^{\circ}\)。
Step 2:二分找到与圆相切的射线
由于圆心在 \(x\) 轴上方,询问交互库 \((0,x)\ (x<0)\) 的返回值 \(d_0\) 显然是 \(\sqrt{x_c^2+y_c^2}-r\):因为过圆心且垂直于射线的直线与射线没有交点,故最短距离为原点与圆心距离减去半径。
注意到根据三个方程我们可以直接解出 \((x,y,r)\),\(d_0=\sqrt{x_c^2+y_c^2}-r\) 已经是其中一个了。只需要再找到两个和圆距离 \(\neq d_0\) 且 \(\neq 0\) 的射线即可,称其为合法射线。
但是我们不能随便询问!因为可以构造一个与 \(y=kx\) 非常相近且半径非常大的圆,例如与 \(y=-x\) 几乎相切的 \((50000,50000,70709)\),使得合法的射线范围非常小。因为一旦稍有偏移,我们询问到的是 \(d_0\),要么就是 \(0\)(上述例子中,只有 \(y=-x\) 和过原点的圆的两条切线之间所夹住的区域合法)。而我们不知道出题人会构造什么毒瘤数据,这也意味着我们不能询问固定的射线,这样是没有前途的。
但注意到距离切线非常近(指与切线夹角非常小且与圆相离的射线范围)的那一块区域是合法的,这启发我们二分出几乎与圆相切(但与圆相离)的两条射线 \(a:(0,0)\to (x_a,y_a)\) 与 \(b:(0,0)\to (x_b,y_b)\)。具体怎么二分呢,想象一个 \((2\times10^6)\times (2\times 10^6)\) 的盒子包住了整个坐标轴。我们在从左逼近时,若返回值 \(>\rm eps\) 则认为与圆相离,向顺时针方向二分,否则认为与圆相交或相切,向逆时针方向二分。从右逼近则相反。
代码中寻找射线 \(a\) 只在第二象限内(原因在接下来会提到),因为圆心在 \(x\) 轴上方导致就算二分不到与切线很相近的位置,我们也可以找到不同于 \(d_0\) 和 \(0\) 的其它合法射线(想一想,为什么?Hint:\(10^6>10^5\))。
Step 3:枚举 \(r\) 并根据 \(d_0,d_a\) 求出 \((x,y)\)
根据圆与 \(a\) 的距离 \(d_a\) 以及 \(d_0\) 仍不足以确定这个圆:两个方程,三个变量。如果再加上 \(d_b\) 那么算起来太麻烦,精度爆炸怎么办?没有关系,注意到 \(r\) 是整数并且 \(\leq 10^5\),我们直接枚举 \(r\) 并根据 \(d_0,d_a\) 算出 \(x,y\),再检查当前的圆 \((x,y,r)\) 与 \(b\) 的距离是否等于 \(d_b\)。若相等则说明 \((x,y,r)\) 即为答案。这样精度就很优秀了。
怎么算 \(x,y\):注意到射线 \(a\) 在第二象限内,设其与 \(x\) 轴负半轴的夹角为 \(\alpha\),先将坐标轴逆时针旋转 \(\alpha\) 使得 \(a\) 落在 \(x\) 轴负半轴上,我们设原来的 \(x,y\) 经过这样的变换后新的坐标为 \(x_T,y_T\)。我们很容易求出 \(x_T,y_T\):\(y_T\) 就是 \(r+d_a\),而 \(d_0\) 在这样的变换下是不会变的(旋转变换不改变两点之间的距离),因此 \(x_T^2+y_T^2=(r+d_0)^2\)。解得 \(|x_T|\) 后还需要确定符号:究竟是在新坐标系的第一象限还是第二象限。这个可以通过求得 \(a\) 后询问交互库 \((-x_a,-y_a)\) 得到 \(d_a'\),若 \(d_a<d_a'\) 说明 \(T\) 在第二象限,令 \(x_T\gets -|x_T|\),否则 \(T\) 在第一象限,\(x_T\gets |x_T|\)。
注意到我们将坐标轴逆时针旋转了 \(\alpha\) 角度,因此还要顺时针转回来。将其乘以
\]
即
\]
即可。根据 \(\alpha\in\left[0,\dfrac \pi 2\right]\) 进行了化简。至于怎么算圆到射线的距离,点积搞搞就好了吧,实在不行可以像我一样上网现学。
至此,本题被我们完美解决。时间复杂度 \(\mathcal{O}(r)\),询问次数为 \(2\log V\),其中 \(V\) 是询问最大范围。代码中使用 \(V=2\times 10^5\),一个测试点大约询问 \(50\) 次。
const ld eps=1e-5;
const ll N=2e5;
ld max(ld x,ld y){return x>y?x:y;}
bool Eq(ld x,ld y){return fabs(x-y)<eps;}
bool Isz(ld x){return fabs(x)<eps;}
ld up,down,left,right;
ld dis(ld x1,ld y1,ld x2,ld y2){
return sqrt((x1-x2)*(x1-x2)+((y1-y2)*(y1-y2)));
}
ld dis(ld x1,ld y1,ld x2,ld y2,ld r){
ld dot=x1*x2+y1*y2,d=dis(0,0,x2,y2);
if(dot<eps)return max((ld)0,d-r);
ld need=dot/dis(0,0,x1,y1);
return max((ld)0,sqrt(d*d-need*need)-r);
}
int swp,type;
void ref(int &x,int &y){int t=y; y=x,x=-t;}
ld query(int x,int y){
for(int j=1;j<=swp;j++)ref(x,y);
std::cout<<"? "<<x<<" "<<y<<std::endl;
ld res; std::cin>>res;
return res;
}
void answ(int x,int y,int r){
for(int j=1;j<=swp;j++)ref(x,y);
std::cout<<"! "<<x<<" "<<y<<" "<<r<<std::endl,exit(0);
}
void answer(ld x,ld y,ld r){
int xx=x<0?x-eps:x+eps;
int yy=y<0?y-eps:y+eps;
return answ(xx,yy,r+eps);
}
int main(){
up=query(0,10),down=query(0,-10);
left=query(-10,0),right=query(10,0);
type=Isz(up)+Isz(down)+Isz(left)+Isz(right);
if(type==0){
ld mx=max(max(up,down),max(left,right));
if(down==mx&&right==mx)swp=1;
if(right==mx&&up==mx)swp=2;
if(up==mx&&left==mx)swp=3;
}
if(type==1){
if(Isz(left))swp=1;
if(Isz(down))swp=2;
if(Isz(right))swp=3;
}
if(type==2){
if(Isz(left)&&Isz(up))swp=1;
if(Isz(down)&&Isz(left))swp=2;
if(Isz(right)&&Isz(down))swp=3;
}
up=query(0,10),down=query(0,-10);
left=query(-10,0),right=query(10,0);
ll l=1,r=N*2-1,xx,yy; ld res;
while(l<r){
ll m=l+r>>1;
xx=-std::min(N,m),yy=N-max(0ll,m-N);
(res=query(xx,yy))>1e-6?r=m:l=m+1;
}
xx=-std::min(N,l),yy=N-max(0ll,l-N);
ld upl=query(xx,yy),downr=query(-xx,-yy);
ld mdis=std::min(upl,downr);
ll xx2,yy2; l=1,r=N*3-1;
while(l<r){
ll m=(l+r>>1)+1;
xx2=std::min(N,m),yy2=-N+max(0ll,m-N);
(res=query(xx2,yy2)>1e-6)?l=m:r=m-1;
}
xx2=std::min(N,l),yy2=-N+max(0ll,l-N);
res=query(xx2,yy2);
for(int r=1;r<=1e5;r++){
ld y=mdis+r,x=sqrt((down+r)*(down+r)-y*y);
ld sn=(ld)fabs(yy)/(ld)(sqrt(xx*xx+yy*yy));
ld cs=(ld)fabs(xx)/(ld)(sqrt(xx*xx+yy*yy));
if(Eq(mdis,upl))x=-x;
ld x0=x*cs+y*sn,y0=-x*sn+y*cs; x=x0,y=y0;
if(Eq(res,dis(xx2,yy2,x,y,r)))answer(x,y,r);
}
return 0;
}
// qwq Kelly qwq
CF1578I Interactive Rays:ICPC WF Moscow Invitational Contest I 题解的更多相关文章
- 2018 ICPC Pacific Northwest Regional Contest I-Inversions 题解
题目链接: 2018 ICPC Pacific Northwest Regional Contest - I-Inversions 题意 给出一个长度为\(n\)的序列,其中的数字介于0-k之间,为0 ...
- ACM ICPC 2015 Moscow Subregional Russia, Moscow, Dolgoprudny, October, 18, 2015 G. Garden Gathering
Problem G. Garden Gathering Input file: standard input Output file: standard output Time limit: 3 se ...
- ACM ICPC 2015 Moscow Subregional Russia, Moscow, Dolgoprudny, October, 18, 2015 D. Delay Time
Problem D. Delay Time Input file: standard input Output file: standard output Time limit: 1 second M ...
- 2018-2019 ICPC, NEERC, Southern Subregional Contest
目录 2018-2019 ICPC, NEERC, Southern Subregional Contest (Codeforces 1070) A.Find a Number(BFS) C.Clou ...
- ACM ICPC Central Europe Regional Contest 2013 Jagiellonian University Kraków
ACM ICPC Central Europe Regional Contest 2013 Jagiellonian University Kraków Problem A: Rubik’s Rect ...
- Codeforces 2018-2019 ICPC, NEERC, Southern Subregional Contest
2018-2019 ICPC, NEERC, Southern Subregional Contest 闲谈: 被操哥和男神带飞的一场ACM,第一把做了这么多题,荣幸成为7题队,虽然比赛的时候频频出锅 ...
- 2016 NEERC, Moscow Subregional Contest K. Knights of the Old Republic(Kruskal思想)
2016 NEERC, Moscow Subregional Contest K. Knights of the Old Republic 题意:有一张图,第i个点被占领需要ai个兵,而每个兵传送至该 ...
- 2019-2020 ICPC, Asia Jakarta Regional Contest (Online Mirror, ICPC Rules, Teams Preferred)
2019-2020 ICPC, Asia Jakarta Regional Contest (Online Mirror, ICPC Rules, Teams Preferred) easy: ACE ...
- ICPC North Central NA Contest 2018
目录 ICPC North Central NA Contest 2018 1. 题目分析 2. 题解 A.Pokegene B.Maximum Subarrays C.Rational Ratio ...
随机推荐
- Java编程开发学习路线图(附所有免费课程+在线自测)
转自 https://yq.aliyun.com/articles/134286?spm=5176.100239.0.0.1UfveS 摘要: 长期以来,Java一直占据TIOBE编程语言排行版第一 ...
- Noip模拟42 2021.8.17
T1 卷 一看跟没有上司的舞会一样,直接敲了然后试个自己造的样例对了就跑了... 然而把它想简单了,乘积取模,还能比大小吗????? 显然不能 所以直接让对数的加和跟着$dp$直接一起跑,比大小的都用 ...
- 【做题记录】 [JLOI2011]不等式组
P5482 [JLOI2011]不等式组 超烦人的细节题!(本人调了两天 QAQ ) 这里介绍一种只用到一只树状数组的写法(离线). 树状数组的下标是:所有可能出现的数据进行离散化之后的值. 其含义为 ...
- 与 Python 之父聊天:更快的 Python!
Python猫注: 在今年 5 月的 Python 语言峰会上,Guido van Rossum 作了一场<Making CPython Faster>的分享(材料在此),宣告他加入了激动 ...
- linux命令中find, which、whereis、locate,有什么区别?
whatis 用于查询一个命令执行什么功能,并将查询结果打印到终端上 which 查看可执行文件的位置 whereis 查看文件的位置 man Linux提供了丰富的帮助手册,当你需要查看某个命令的参 ...
- poj 1129 Channel Allocation(图着色,DFS)
题意: N个中继站,相邻的中继站频道不得相同,问最少需要几个频道. 输入输出: Sample Input 2 A: B: 4 A:BC B:ACD C:ABD D:BC 4 A:BCD B:ACD C ...
- 极速上手 VUE 3—v-model 的使用变化
本篇文章主要介绍 v-model 在 Vue2 和 Vue3 中使用变化. 一.Vue2 中 v-model 的使用 v-model 是语法糖,本质还是父子组件间的通信.父子组件通信时有两种方式: 父 ...
- 中文NER的那些事儿4. 数据增强在NER的尝试
这一章我们不聊模型来聊聊数据,解决实际问题时90%的时间其实都是在和数据作斗争,于是无标注,弱标注,少标注,半标注对应的各类解决方案可谓是百花齐放.在第二章我们也尝试通过多目标对抗学习的方式引入额外的 ...
- Linux高级命令及mysql数据安装
Linux系列--高级命令--mysql数据库安装 数据库是用来组织.存储和管理数据的仓库 1.安装数据库:执行命令yum -y install mysql -server 2.启动数据库:安装完毕, ...
- Java——去掉小数点后面多余的0
当小数点后位数过多,多余的0没有实际意义,根据业务需求需要去掉多余的0.后端存储浮点型数据一般会用到Bigdecimal 类型,可以调用相关方法去掉小数后多余0,然后转为string. public ...