opencv之模糊处理
初学OpenCV的开发者很容易被OpenCV中各种滤波方法所困扰,不知道到底该用哪里一个来做滤波。表面原因看起来是因为OpenCV中各种滤波方式实在是太多太杂,
其背后原因是对各种滤波方法的应用场景认知出现了问题,所以这里小编从应用场景与项目中解决问题的实际出发,跟大家一起探讨一下各种滤波方法。
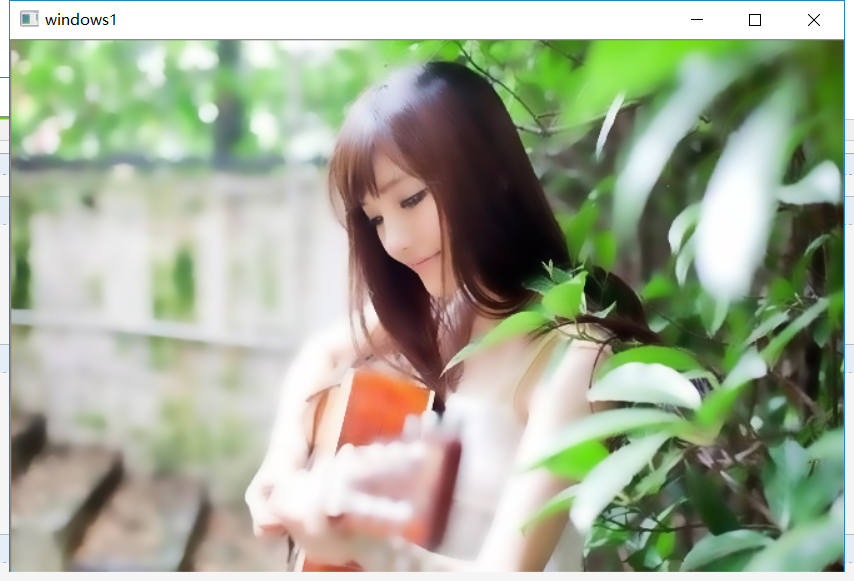
一:模糊函数blur
参数说明
-参数InputArray表示输入图像Mat对象
-参数OutputArray表示模糊之后输出Mat对象
-参数Size表示卷积核大小,此参数决定模糊程度,Size(x, y)其中x, y取值越大表现模糊程度越深,而且X与Y的值为奇数。
-参数Point表示锚定的位置,也就是卷积核替换重叠像素中的哪个位置。此参数一般使用Point(-1,-1)表示使用卷积核的中心位置。
-最后一个参数表示对边缘的处理方法,一般默认4表示默认处理方法
XY方向模糊-示例代码:
#include<opencv2/opencv.hpp>
#include<iostream>
int main(){
cv::Mat m1 = cv::imread("D:/640.jpg",4);
cv::Mat m2;
cv::namedWindow("windows",CV_WINDOW_AUTOSIZE);
cv::imshow("windows",m1);
cv::blur(m1,m2,cv::Size(5,5),cv::Point(-1,-1),4);
cv::namedWindow("windows1", CV_WINDOW_AUTOSIZE);
cv::imshow("windows1", m2);
cv::waitKey(0);
return 0;
}


应用场景:
通过blur函数一般来去除噪声,可以在图像边缘提取、特征提取之前对图像进行大小为3x3的模糊以此来达到去掉干扰和噪声目的
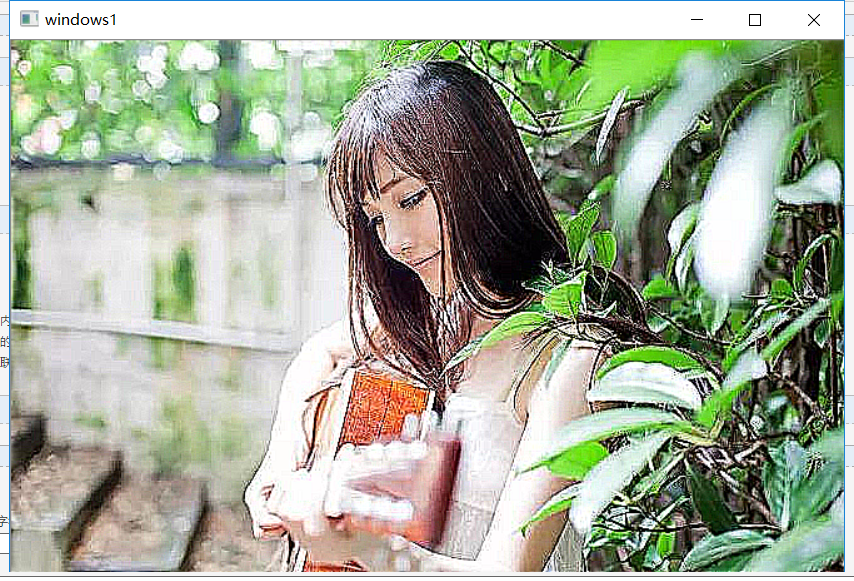
二:高斯模糊函数GaussianBlur
参数说明
-参数InputArray表示输入图像Mat对象
-参数OutputArray表示模糊之后输出Mat对象
-参数Size表示卷积核大小,此参数决定模糊程度,Size(x, y)其中x, y取值越大表现模糊程度越深,而且X与Y的值为奇数。
-参数SigmaX表示高斯方程中X方向的标准方差
-参数SigmaY表示高斯方程中X方向的标准方差
-最后一个参数表示对边缘的处理方法,一般默认4表示默认处理方法
其中Size大小表示高斯卷积核、必须是奇数而且必须是正数、SigmaX在当Size大小不为零的时候直接从Size大小计算、SigmaY在SigmaX不为零的时候从X计算、SigmaX为零的时候从Size大小中计算。
高斯模糊卷积核大小5x5-示例代码
#include<opencv2/opencv.hpp>
#include<iostream>
int main(){
cv::Mat m1 = cv::imread("D:/640.jpg",4);
cv::Mat m2;
cv::namedWindow("windows",CV_WINDOW_AUTOSIZE);
cv::imshow("windows",m1);
cv::GaussianBlur(m1,m2,cv::Size(5,5),0,0);
cv::namedWindow("windows1", CV_WINDOW_AUTOSIZE);
cv::imshow("windows1", m2);
cv::waitKey(0);
return 0;
}


#include<opencv2/opencv.hpp>
#include<iostream>
int main(){
cv::Mat m1 = cv::imread("D:/640.jpg",4);
cv::Mat m2;
cv::namedWindow("windows",CV_WINDOW_AUTOSIZE);
cv::imshow("windows",m1);
cv::GaussianBlur(m1,m2,cv::Size(0,0),15,15);
cv::namedWindow("windows1", CV_WINDOW_AUTOSIZE);
cv::imshow("windows1", m2);
cv::waitKey(0);
return 0;
}


应用场景:
高斯模糊的应用场景一般作为退化函数使用,可以去除图像噪声,Canny边缘提取的第一步就是高斯模糊,以此来消除噪声干扰,用高斯模糊去噪对于随机噪声效果明显。
三:中值滤波函数-medianBlur
参数说明:
-参数InputArray表示输入图像Mat对象
-参数OutputArray表示模糊之后输出Mat对象
-参数ksize表示卷积核大小,必须是正数而且必须是大于1,如:3、5、7等。
共有三个参数、其中第一个表示输入图像Mat对象,第二个表示滤波结果输出Mat对象、第三个参数则表示卷积核的大小。
中值滤波-代码示例
#include<opencv2/opencv.hpp>
#include<iostream>
int main(){
cv::Mat m1 = cv::imread("D:/640.jpg",4);
cv::Mat m2;
cv::namedWindow("windows",CV_WINDOW_AUTOSIZE);
cv::imshow("windows",m1);
cv::medianBlur(m1,m2,5);
cv::namedWindow("windows1", CV_WINDOW_AUTOSIZE);
cv::imshow("windows1", m2);
cv::waitKey(0);
return 0;
}


应用场景:
从上面的例子我们可以看出,中值滤波对椒盐噪声的图像有比较好的效果,可以去除图像中像素极大或者极小值。
四:双边模糊函数-bilateralFilter
参数说明:
-参数InputArray表示输入图像Mat对象
-参数OutputArray表示模糊之后输出Mat对象
-参数d表示双边滤波时候中心到周围像素距离
-参数sigmaColor表示高斯核中颜色值标准方差
-参数sigmaSpace表示高斯核中空间的标准方差
-参数borderType表示边缘的处理方法
一共六个参数,其中如果参数d没有申明的话或者是负数的话就从sigmaSpace中计算得到即可。常见的d取值为15或者20如果过大会导致运算时间较长。
#include<opencv2/opencv.hpp>
#include<iostream>
int main(){
cv::Mat m1 = cv::imread("D:/640.jpg",4);
cv::Mat m2;
cv::namedWindow("windows",CV_WINDOW_AUTOSIZE);
cv::imshow("windows",m1);
cv::bilateralFilter(m1,m2,15,120,10,4);
cv::namedWindow("windows1", CV_WINDOW_AUTOSIZE);
cv::imshow("windows1", m2);
cv::waitKey(0);
return 0;
}

应用场景:
高斯双边滤波经常被用来实现图像美化类APP用来做高斯磨皮核心算法,然后基于SOBEL算子进行叠加处理,通过高斯模糊得到最终结果。效果异常明显,是一个不错的选择。
五:滤波函数filter2D
参数说明
-参数InputArray表示输入图像Mat对象
-参数OutputArray表示模糊之后输出Mat对象
-参数d表输出图像的深度,-1表示跟输入图像深度相同。
-参数kernel表示自定义的Mat对象,卷积核或者算子。
-参数Point表示锚定的位置,Point(-1, -1)表示默认为卷积核中心位置。
-参数delta表示卷积处理之后的每个像素值是否加上常量delta,默认0.0表示不加上额外值到处理后的像素值上。
-参数borderType表示边缘像素的处理方式,默认为BORDER_DEFAULT。
通过定义不同的卷积核、filter2D函数可以实现卷积的各种功能、包括模糊、锐化、边缘提取等。下面我们就来一一通过代码演示
实现模糊-代码演示
#include<opencv2/opencv.hpp>
#include<iostream>
int main(){
cv::Mat m1 = cv::imread("D:/640.jpg",4);
cv::Mat m2;
cv::namedWindow("windows",CV_WINDOW_AUTOSIZE);
cv::imshow("windows",m1);
int ksize = 15;
cv::Mat kernel = cv::Mat::ones(ksize, ksize, CV_32F) / (float)(ksize*ksize);//ones函数很像MATLAB里的语句吧。这句的意思是先定义一个15×15的32bit浮点数矩阵,元素全为1,所有元素再除以225。
cv::filter2D(m1,m2,-1,kernel,cv::Point(-1,-1),0.0,4);
cv::bilateralFilter(m1,m2,15,120,10,4);
cv::namedWindow("windows1", CV_WINDOW_AUTOSIZE);
cv::imshow("windows1", m2);
cv::waitKey(0);
return 0;
}


实现边缘提取-代码演示
#include<opencv2/opencv.hpp>
#include<iostream>
int main(){
cv::Mat m1 = cv::imread("D:/640.jpg",4);
cv::Mat m2;
cv::namedWindow("windows",CV_WINDOW_AUTOSIZE);
cv::imshow("windows",m1);
int ksize = 15;
cv::Mat kernel =( cv::Mat_<char>(3,3)<<-1,-1,-1,-1,8,-1,-1,-1,-1);
cv::filter2D(m1,m2,-1,kernel,cv::Point(-1,-1),0.0,4);
cv::bilateralFilter(m1,m2,15,120,10,4);
cv::namedWindow("windows1", CV_WINDOW_AUTOSIZE);
cv::imshow("windows1", m2);
cv::waitKey(0);
return 0;
}


实现锐化-代码演示
#include<opencv2/opencv.hpp>
#include<iostream>
int main(){
cv::Mat m1 = cv::imread("D:/640.jpg",4);
cv::Mat m2;
cv::namedWindow("windows",CV_WINDOW_AUTOSIZE);
cv::imshow("windows",m1);
int ksize = 15;
cv::Mat kernel =( cv::Mat_<char>(3,3)<<-1,-1,-1,-1,9,-1,-1,-1,-1);
cv::filter2D(m1,m2,-1,kernel,cv::Point(-1,-1),0.0,4);
cv::namedWindow("windows1", CV_WINDOW_AUTOSIZE);
cv::imshow("windows1", m2);
cv::waitKey(0);
return 0;
}
Robot算子效果-代码演示
#include<opencv2/opencv.hpp>
#include<iostream>
int main(){
cv::Mat m1 = cv::imread("D:/640.jpg",4);
cv::Mat m2;
cv::namedWindow("windows",CV_WINDOW_AUTOSIZE);
cv::imshow("windows",m1);
int ksize = 15;
cv::Mat kernel =( cv::Mat_<char>(2,2)<<-1,0,0,1);
cv::filter2D(m1,m2,-1,kernel,cv::Point(-1,-1),0.0,4);
cv::namedWindow("windows1", CV_WINDOW_AUTOSIZE);
cv::imshow("windows1", m2);
cv::waitKey(0);
return 0;
}

Sobel算子效果-代码
#include<opencv2/opencv.hpp>
#include<iostream>
int main(){
cv::Mat m1 = cv::imread("D:/1.jpg",4);
cv::Mat m2;
cv::namedWindow("windows",CV_WINDOW_AUTOSIZE);
cv::imshow("windows",m1);
int ksize = 15;
cv::Mat kernel =( cv::Mat_<char>(3,3)<<1,2,1,0,0,0,-1,-2,-1);
cv::filter2D(m1,m2,-1,kernel,cv::Point(-1,-1),0.0,4);
cv::namedWindow("windows1", CV_WINDOW_AUTOSIZE);
cv::imshow("windows1", m2);
cv::waitKey(0);
return 0;
}

应用场景:
filter2D是OpenCV中相当灵活的滤波函数、灵活使用可以适合多个不同应用场景,实现多种功能包括模糊、锐化、边缘提取、图像增强等等。
总结:
OpenCV中为我们提供上述常见5种滤波函数,熟练掌握这五种滤波方法与应用场景是学以致用的关键。
opencv之模糊处理的更多相关文章
- opencv 简单模糊和高斯模糊 cvSmooth
cv::Mat 是C++版OpenCV的新结构. cvSmooth() 是老版 C API. 没有把C接口与C + + 结合. 建议你们也可以花一些时间看一下介绍. 同样,你如果查看opencv/mo ...
- opencv 双边模糊,膨胀腐蚀 开 闭操作
#include <opencv2/opencv.hpp> #include <iostream> using namespace cv; int main(int argc, ...
- OpenCV——旋转模糊
参考来源: 学习OpenCV:滤镜系列(5)--径向模糊:缩放&旋转 // define head function #ifndef PS_ALGORITHM_H_INCLUDED #defi ...
- OpenCV——旋转模糊 (二)
// define head function #ifndef PS_ALGORITHM_H_INCLUDED #define PS_ALGORITHM_H_INCLUDED #include < ...
- opencv知识积累
1.OpenCV 3计算机视觉:Python语言实现 https://github.com/techfort/pycv 2.OpenCV3编程入门 opencv 均值模糊:一般用来处理图像的随机噪声 ...
- 第三节,使用OpenCV 3处理图像(模糊滤波、边缘检测)
一 不同色彩空间的转换 OpenCV中有数百种关于在不同色彩空间之间转换的方法.当前,在计算机中有三种常用的色彩空间:灰度,BGR以及HSV(Hue,Saturation,Value). 灰度色彩空间 ...
- 图像的模糊-opencv
调用两个API,一个是均值模糊,一个是高斯模糊.如下所示: #include<opencv2/opencv.hpp> #include<iostream> using name ...
- 【计算机视觉】OpenCV篇(6) - 平滑图像(卷积/滤波/模糊/降噪)
平滑滤波 平滑滤波是低频增强的空间域滤波技术.空间域滤波技术即不经由傅立叶转换,直接处理影像中的像素,它的目的有两类:一类是模糊:另一类是消除噪音.空间域的平滑滤波一般采用简单平均法进行,就是求邻近像 ...
- 学习OpenCV:滤镜系列(15)——羽化(模糊边缘)
============================================== 版权所有:小熊不去实验室CSDN博客 ================================== ...
随机推荐
- rtd1296 mtd 设备驱动分析
mtd 分区一般采用3种方式实现 1.内核写死 mtd_partition 2.u-boot 传参 为了使kernel能够解析mtdparts信息,我们需要将内核中的Device Drivers - ...
- mac mysql提示mysql.sock'
Warning: World-writable config file '/Applications/XAMPP/xamppfiles/etc/my.cnf' is ignored ERROR 200 ...
- Copycat - MemberShip
https://github.com/atomix/copycat http://atomix.io/copycat/docs/membership/ 为了便于实现,Copycat把membe ...
- jmeter_用户并发登录
部分摘自:https://blog.csdn.net/weixin_41291554/article/details/80492276 第一种方案:对登录账号和密码进行参数化 1.添加设置线程数: N ...
- php获取数据库结构
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3.org/ ...
- commonjs模块和es6模块的区别?
commonjs模块和es6模块最主要的区别:commonjs模块是拷贝,es6模块是引用,但理解这些,先得理解对象复制的问题,在回过头来理解这两模块的区别. 一.基本数据类型的模块 ./a1.js ...
- find 命令 查找
find 查找文件和目录 find /home -name "" find 后接查找的目录,-name 后指定需要查找的文件名 文件名可以用*表示所有find /home -nam ...
- CentOS安装python3.5.0+uwsgi+nginx
1安装编译工具 yum install zlib-devel bzip2-devel openssl-devel python-devel kernel-devel libffi-devel ncur ...
- 【NMS与IOU代码】
# -*- coding: utf-8 -*- import numpy as np def IOU1(A,B): #左上右下坐标(x1,y1,x2,y2) w=max(0,min(A[2],B[2] ...
- AxMIMS系统开发环境搭建
系统环境:Windows10, VS2013, Qt5.6.2 64bit 1.CloudCompare2.8.1编译 (shapefilelib1.3,geos3.6.1) 2.PCL-1.8.0- ...