[TPYBoard - Micropython之会python就能做硬件 8] 学习使用超声波模块制作避障小车
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi
一、实验器材
1、TPYboard V102板 一块
2、电机驱动模块L298N 一个
3、电机 两块
4、小车底盘
5、超声波模块
6、5110屏 一块
二、超声波模块
1、什么是超声波模块
超声波传感器是利用超声波的特性研制而成的传感器, 它是通过传送一个超声波(远高于人的听觉范围)和提供一个对应于爆裂回声返回到传感器所需时间的输出脉冲来工作的。超声波传感器在非接触性测量方面的应用非常广泛,如检测液体水位(特别是具有腐蚀性的液体,如硫酸、硝酸液体),汽车倒车防撞系统,金属/非金属探伤等,都可以用到超声波距离传感器。
2、超声波模块测距的原理
(1)采用IO口TRIG触发测距,给最少10us的高电平信呈。
(2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回。
(3)有信号返回,通过 IO 口 ECHO 输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2。
三、实验一:超声波模块测距,用5110来显示
1、连线方法
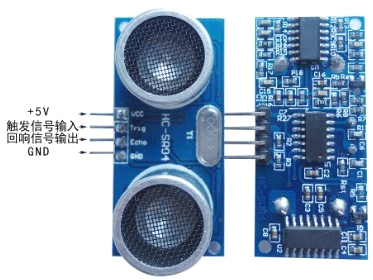
(1)超声波模块连接方法
VCC 供 5V电源, GND 为地线,TRIG 触发控制信号输入,接板子的X2,ECHO 回响信号输出,接板子的X1,四个接口端。
(2)5110连线及使用方法
具体见:http://www.cnblogs.com/xiaowuyi/p/6347336.html
2、原代码
导入font.py文件和upcd8544.py文件,编写main.py
main.py的代码如下:
import pyb
from pyb import Pin
from pyb import Timer
import upcd8544
from machine import SPI,Pin Trig = Pin('X2',Pin.OUT_PP)
Echo = Pin('X1',Pin.IN)
num=0
flag=0
run=1
def start(t):
global flag
global num
if(flag==0):
num=0
else:
num=num+1
def stop(t):
global run
if(run==0):
run=1
start1=Timer(1,freq=10000,callback=start)
stop1=Timer(4,freq=2,callback=stop) while True: if(run==1):
SPI = pyb.SPI(1) #DIN=>X8-MOSI/CLK=>X6-SCK
#DIN =>SPI(1).MOSI 'X8' data flow (Master out, Slave in)
#CLK =>SPI(1).SCK 'X6' SPI clock
RST = pyb.Pin('Y10')
CE = pyb.Pin('Y11')
DC = pyb.Pin('Y9')
LIGHT = pyb.Pin('Y12')
lcd_5110 = upcd8544.PCD8544(SPI, RST, CE, DC, LIGHT)
Trig.value(1)
pyb.udelay(100)
Trig.value(0)
while(Echo.value()==0):
Trig.value(1)
pyb.udelay(100)
Trig.value(0)
flag=0
if(Echo.value()==1):
flag=1
while(Echo.value()==1):
flag=1
if(num!=0):
#print('num:',num)
distance=num/10000*34299/2
print('Distance:')
print(distance,'cm')
lcd_5110.lcd_write_string('Distance',0,0)
lcd_5110.lcd_write_string(str(distance),0,1)
lcd_5110.lcd_write_string('cm',50,1)
flag=0
run=0
3、效果
(1)靠近障碍物

(2)远离障碍物

四、实验二:避障小车
1、什么是电机驱动模块
电机驱动模块主要是可以控制电机的运行:调速、运行、停止、步进、匀速等操作
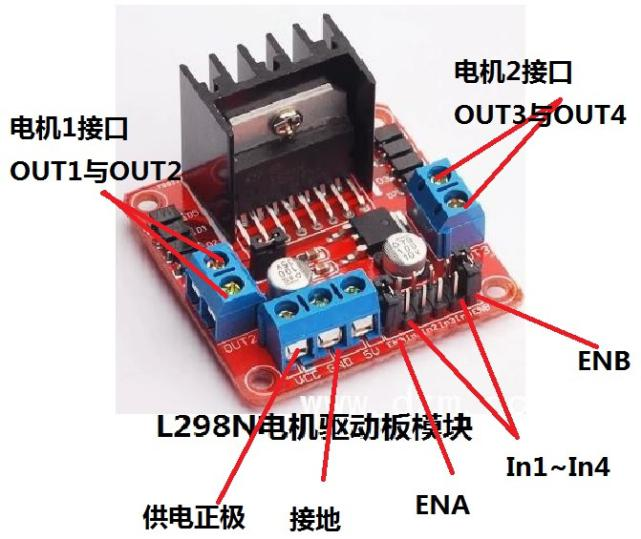
2、L298N的连接及使用方法
L298N模块是2路的H桥驱动,所以可以同时驱动两个电机,接法如图所示使能ENA ENB之后,可以分别从IN1 IN2输入PWM信号驱动电机1的转速和方向,可以分别从IN3 IN4输入PWM信号驱动电机2的转速和方向。我们将电机1接口的OUT1与OUT2与小车的一个电机的正负极连接起来,将电机2接口的OUT3与OUT2与小车的另一个电机的正负极连接起来。然后将两边的接线端子,即供电正极(中间的接线端子为接地)连接TPYboard的VIN,中间的接线端子即接地,连接TPYBoard的GND,In1-In4连接TPYBoard的Y1,Y2,Y3,Y4,通过Y1,Y2与Y3,Y4的高低电平,来控制电机的转动,从而让小车前进,后退,向左,向右。
3、利用底盘+V102+超声波+L298N当小车往前开时,遇到障碍会自己拐弯,躲避
(1)原代码 main,py文件
# main.py -- put your code here!
import pyb
from pyb import Pin
from pyb import Timer def start(t):
global flag
global num
if(flag==0):
num=0
else:
num=num+1
def stop(t):
global run
if(run==0):
run=1
def left():
x1.high()
x2.low()
y1.high()
y2.low()
def go():
x1.high()
x2.low()
y1.low()
y2.high() def back():
x1.low()
x2.high()
y1.high()
y2.low()
def right():
x1.low()
x2.high()
y1.low()
y2.high()
def stop():
x1.low()
x2.low()
y1.low()
y2.low() Trig = Pin('X9',Pin.OUT_PP)
Echo = Pin('X10',Pin.IN)
num=0
flag=0
run=1 start1=Timer(1,freq=10000,callback=start)
stop1=Timer(4,freq=2,callback=stop) x1 = Pin('X1', Pin.OUT_PP)
x2 = Pin('X2', Pin.OUT_PP)
y1 = Pin('Y1', Pin.OUT_PP)
y2 = Pin('Y2', Pin.OUT_PP) while True:
if(run==1):
Trig.value(1)
pyb.udelay(100)
Trig.value(0)
while(Echo.value()==0):
Trig.value(1)
pyb.udelay(100)
Trig.value(0)
flag=0
if(Echo.value()==1):
flag=1
while(Echo.value()==1):
flag=1
if(num!=0):
#print('num:',num)
distance=num/10000*34299/2
print('Distance')
print(distance,'cm')
if distance>=20:
go()
if distance<=20:
stop()
back()
flag=0
run=0
(2)实现效果
以上视频如果浏览不了,请访问http://admin.turnipsmart.com/IMG_3362.mp4
[TPYBoard - Micropython之会python就能做硬件 8] 学习使用超声波模块制作避障小车的更多相关文章
- [TPYBoard - Micropython之会python就能做硬件 8] 学习使用蓝牙模块及舵机
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.实验器材 1.TPYboard V102板 一块 2.电机驱动模块L2 ...
- [TPYBoard - Micropython之会python就能做硬件 6] 学习使用OLED显示屏
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.实验器材 1.TPYBoard板子一块 2.数据线一条 ...
- [TPYBoard - Micropython之会python就能做硬件 1] 运行第一个脚本——点亮LED
转载请注明:@小五义http://www.cnblogs.com/xiaowuyiQQ群:64770604 会python就能做硬件! 一.TPYBoard V102开发板 TPYBoard V102 ...
- [TPYBoard - Micropython之会python就能做硬件 开篇]会python就能做硬件!
转载请注明:@小五义http://www.cnblogs.com/xiaowuyiQQ群:64770604 会python就能做硬件! 在写这套教程之前,首先感觉山东萝卜电子科技有限公司(turnip ...
- [TPYBoard - Micropython 之会python就能做硬件 9] 五分种学会用TPYBoard V102 制作避障小车(升级版)
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 感谢山东萝卜电子科技公司授权 一.实验器材 1.TPYboard V102板 ...
- [TPYBoard-Micropython之会python就能做硬件 7] 学习使用蓝牙模块及舵机
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.实验器材 1.TPYboard V102板 一块 2 ...
- [TPYBoard-Micropython之会python就能做硬件 4] 学习使用电位器和1602显示屏
一.实验器材 1.TPYboard V102板 一块 2.电位器 一个 3.1602 屏 一块 4.杜邦线:若干 二.电位器的使用 电位器 (英文:Potentiometer)是可变电阻器的一种 ...
- [TPYBoard-Micropython之会python就能做硬件 5] 学习使用重力传感器及PWM
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.实验器材 1.TPYboard V102板 一块 2 ...
- [TPYBoard-Micropython之会python就能做硬件 2] 利用micropython控制NOKIA 5110屏
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.本次实验所需器材 1.TPYboard V102板 一块 2.DS3231 ...
随机推荐
- 2018-12-03 VS Code英汉词典插件v0.0.7-尝试词性搭配
续上文VS Code英汉词典插件v0.0.6-改为TS实现, 加测试后, 继续重构(提取常量, 避免var, 添加类型等等), 并完善测试. 测试方法参考: Testing Visual Studio ...
- Python高级特性:列表生成式
列表生成式即List Comprehensions,是Python内置的非常简单却强大的可以用来创建list的生成式. 最常见的例子: 生成list [, , , , , , , , , ]可以用li ...
- (后端)Sql Server日期查询-SQL查询今天、昨天、7天内、30天(转)
今天的所有数据: 昨天的所有数据: 7天内的所有数据: 30天内的所有数据: 本月的所有数据: 本年的所有数据: 查询今天是今年的第几天: select datepart(dayofyear,getD ...
- zabbix监控自动发现监控tomcat(V1)
背景说明: 由于zabbix监控使用自带的模版,只能监控主机上只有1个tomcat的场景适合,虽然网上很多朋友都是在每个监控项上面添加一个空格来解决问题.但是个人感觉这种方法还是蛮麻烦的,所以写一篇使 ...
- SQL Server Alert发送告警邮件少了的原因
最近突然发现我们部署在数据库上面的告警(Alert),当错误日志里面出现错误时,并不是每个错误日志都会发送邮件出来.如下所示,设置了告警"SQL Server Severity Event ...
- 线程ThreadDemo04
package day190109; public class 线程ThreadDemo04 { public static void main(String[] args) throws Inter ...
- IPv6简介
https://segmentfault.com/a/1190000008794218 IPv6的优点 更大的地址空间 名字叫IPv6,但它的长度并不是64位,而是128位,总的地址空间大约为3.4* ...
- c/c++ 模板与STL小例子系列<一 >自建Array数组
c/c++ 模板与STL小例子系列 自建Array数组 自建的Array数组,提供如下对外接口 方法 功能描述 Array() 无参数构造方法,构造元素个数为模板参数个的数组 Array(int le ...
- js在前端json字符串和对象互相转化
js在前端json字符串和对象互相转化 //对象转json串 注意:参数必须是对象,数组不起作用,对象格式{'0'=>'a'} JSON.stringify( arr ); //json字符串转 ...
- python——函数之装饰器
1 问题 实际生活中,我们很难一次性就把一个函数代码写得完美无缺.当我们需要对以前的函数添加新功能时,我们应该怎么做? 2 问题解决思路 (1)可以直接修改原来的函数,在函数内直接修改.当我们对多个函 ...