《机器学习实战》学习笔记第八章 —— 线性回归、L1、L2范数正则项
相关笔记:
吴恩达机器学习笔记(三) —— Regularization正则化
(
问题遗留:

小可只知道引入正则项能降低参数的取值,但为什么能保证 Σθ2 <=λ ?
)
主要内容:
一.线性回归之普通最小二乘法
二.局部加权线性回归
三.岭回归(L2正则项)
四.lasso回归(L1正则项)
五.前向逐步回归
一.线性回归之普通最小二乘法
1.参数的值: (不带正则项)
(不带正则项)
2.Python代码:
def standRegres(xArr, yArr): #普通最小二乘法(没有特征归一化),其实就是不带正则项的最小二乘法
xMat = mat(xArr); yMat = mat(yArr).T
xTx = xMat.T * xMat
if linalg.det(xTx) == 0.0: #如果方阵XTX的行列式为0,则不存在逆矩阵,所以结果不可求。
print "This matrix is singular, cannot do inverse"
return
ws = xTx.I * (xMat.T * yMat) #求出权值w,即参数
return ws
二.局部加权线性回归
1.线性回归很容易出现欠拟合的现象,为了解决这个问题,我们可以使用局部加权线性回归。所谓“加权”,就是给每一个训练数据加上一个权值,而这个权值是根据训练数据点与测试数据点的远近而设定的。训练点离测试点越近,其权值越大;反之则反。
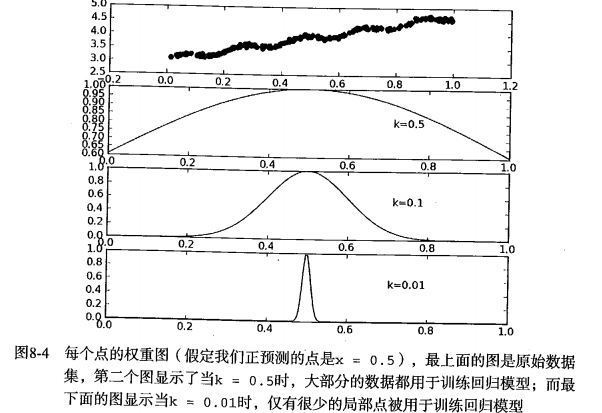
2.训练点 i 的权值 W(i, i) 为:

其中W为对角矩阵,对角线上的值就是数据点的权值。式子中k的值决定了测试点附近的点被赋予多大的权值,且k越小,附近点所占的权值越大,如图:
3.可求得参数的值为:

4.Python代码:
'''k决定了测试点附近的训练点被赋予多大的权值,k越小,权值越大'''
def lwlr(testPoint, xArr, yArr, k=1.0): #局部加权线性回归(只能针对一个测试数据)
xMat = mat(xArr); yMat = mat(yArr).T
m = shape(xMat)[0]
weights = mat(eye((m)))
for j in range(m): # next 2 lines create weights matrix
diffMat = testPoint - xMat[j, :] #
weights[j, j] = exp(diffMat * diffMat.T / (-2.0 * k ** 2))
xTx = xMat.T * (weights * xMat)
if linalg.det(xTx) == 0.0:
print "This matrix is singular, cannot do inverse"
return
ws = xTx.I * (xMat.T * (weights * yMat))
return testPoint * ws def lwlrTest(testArr, xArr, yArr, k=1.0): # 批量求局部加权线性回归(针对多个测试数据)
m = shape(testArr)[0]
yHat = zeros(m)
for i in range(m):
yHat[i] = lwlr(testArr[i], xArr, yArr, k)
return yHat
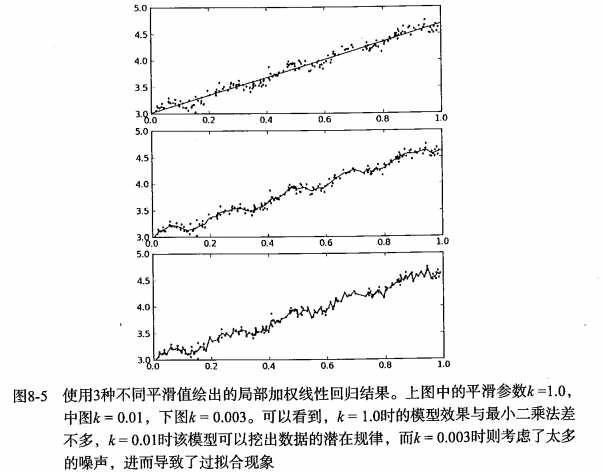
5.拟合效果如图所示,可知当k越小时,对训练数据的拟合效果越好,但是“过好”的话就出现了过拟合,如第三幅图。而效果最好的当属第二幅图:
6.由上述分析以及代码可知,局部加权线性回归有个明显的弱点,那就是:对于每一个测试数据,都需要重新对训练数据集求出权值W,这个计算量应该挺大的。
三.岭回归
1.上述两种线性回归模型都是通过最小二乘法来求解参数的,但是最小二乘法要求矩阵XTX存在逆矩阵,而这并不能保证。于是就有了“岭回归”。
2.所谓岭回归,其实就是在普通的损失函数上加上一个正则项,然而再对其用求导法,其损失函数和参数的值如下:


3.如上式子,听闻 (XTX + λI) 的逆矩阵是必定存在的(除非λ=0),那么为什么通过引入正则项就可以使得其逆矩阵存在呢?
答:从感性上去理解,可知如果数据的特征比数据样本点还多,那么逆矩阵是求不出来的。而加入正则项之后,使得一些不重要的特征的参数接近于0或者等于0,这样就近似于把一些特征给“废掉”了。特征减少之后,可能就达到了特征数少于等于样本数的情况,从而使得逆矩阵可以被求出。
4.Python代码:
def regularize(xMat): # 特征归一化
inMat = xMat.copy()
inMeans = mean(inMat, 0) # calc mean then subtract it off
inVar = var(inMat, 0) # calc variance of Xi then divide by it
inMat = (inMat - inMeans) / inVar
return inMat def ridgeRegres(xMat, yMat, lam=0.2): #岭回归,其实就是加入了正则项的最小二乘法。能对XTX求逆,但还是需要进行判断。
xTx = xMat.T * xMat
denom = xTx + eye(shape(xMat)[1]) * lam
if linalg.det(denom) == 0.0:
print "This matrix is singular, cannot do inverse"
return
ws = denom.I * (xMat.T * yMat)
return ws def ridgeTest(xArr, yArr): #岭回归测试, 在30个不同的lambda下获得的参数
xMat = mat(xArr); yMat = mat(yArr).T
xMat = regularize(xMat) # 特征归一化
yMean = mean(yMat, 0)
yMat = yMat - yMean # to eliminate X0 take mean off of Y……不懂这一步的作用
numTestPts = 30
wMat = zeros((numTestPts, shape(xMat)[1]))
for i in range(numTestPts): #h获取每个lambda下模型的参数
ws = ridgeRegres(xMat, yMat, exp(i - 10))
wMat[i, :] = ws.T
return wMat
四.lasso回归
1.岭回归的正则项使用的平方项(有说法是L2范数,但L2范数不是在求完平方和之后还要开根吗?所以个人认为:岭回归的正则项是L2范数的平方),根据y=x^2的图像可知:
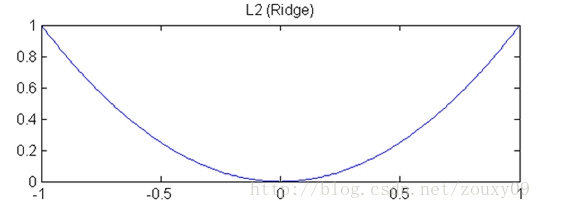
1)当|x|>1, 曲线的斜率很大,这就能加快梯度下降收敛的速度。
2)当|x|<=1时,斜率就变得非常小,此时正则项的作用可以说是失效的了,即不再具备惩罚参数的作用。
总和上述两点可知岭回归的特点是:能加速梯度下降的速度,且使得参数的值较小,但是不能直接把参数变成0(即使很接近0),这样岭回归的特征选取的功能就相对弱一些。
2.为了增强特征选取的功能,我们可以把岭回归的正则项换成是一次项绝对值,即L1范数:

可知y=|x|的图像如下:
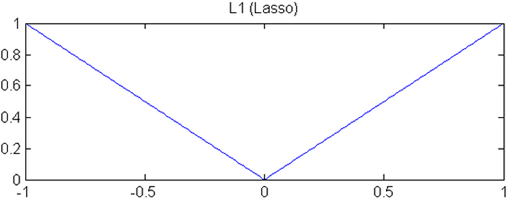
1)曲线的斜率不会发生变化,也就是说正则项的乘法功效是恒定的,这也就使得梯度下降慢而稳定。
2)当|x|<=1时,相比y=x^2,y=|x|的斜率更大,这就使得把某些参数变成0成为了可能。所以lasso回归的特征选择的作用更加强大。
3.有一个数形结合的方法可以很好地解释为什么lasso回归比岭回归有更好的特征选取的作用。如下图:

其中左边的是lasso回归,右边的是岭回归。那一圈圈椭圆为目标函数(不知应该怎么叫,风险项?),而菱形和圆都为限制函数。其中交点就是我们最终求得的参数。
可知,椭圆与菱形的交点很容易出现在菱形的尖尖(顶点),而顶点位于坐标轴上,就是某个或者某些(多维的情况下)参数为0的情况,参数为0的那个特征就背废掉了。而圆与椭圆的交点要出现在坐标轴上的概率就没那么大了。所以lasso回归比岭回归有更好的特征选取的作用。
五.前向逐步回归
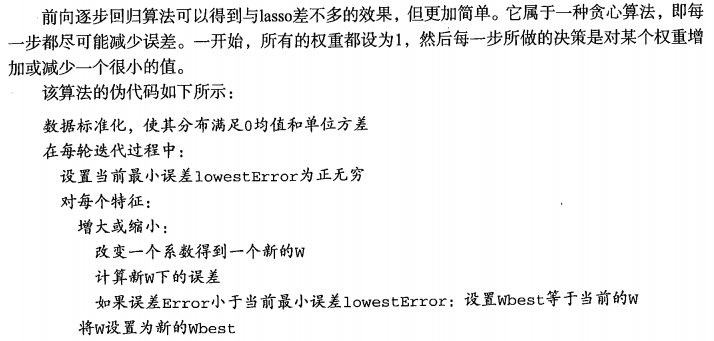
Python代码:
def regularize(xMat): # 特征归一化
inMat = xMat.copy()
inMeans = mean(inMat, 0) # calc mean then subtract it off
inVar = var(inMat, 0) # calc variance of Xi then divide by it
inMat = (inMat - inMeans) / inVar
return inMat def rssError(yArr, yHatArr): # 求出RSS残差平方和
return ((yArr - yHatArr) ** 2).sum() def stageWise(xArr, yArr, eps=0.01, numIt=100): #前向逐步回归
xMat = mat(xArr); yMat = mat(yArr).T
xMat = regularize(xMat) #归一化特征
yMean = mean(yMat, 0)
yMat = yMat - yMean # can also regularize ys but will get smaller coef
m, n = shape(xMat)
ws = zeros((n, 1))
for i in range(numIt): #走numIt步,每一步从:所有的参数加一小部分或减一小部分 中选出RSS最小的那一个来更新参数
lowestError = inf
wsMax = ws.copy() #用于保存当前步中RSS最小的那一组参数
for j in range(n): #枚举每一个参数
for sign in [-1, 1]: #-1为减 1为加
wsTest = ws.copy() #临时变量
wsTest[j] += eps * sign
yTest = xMat * wsTest
rssE = rssError(yMat.A, yTest.A)
if rssE < lowestError: #更新当前步的最优参数组
lowestError = rssE
wsMax = wsTest
ws = wsMax.copy() #更新最优参数组
return ws
《机器学习实战》学习笔记第八章 —— 线性回归、L1、L2范数正则项的更多相关文章
- 【机器学习实战学习笔记(1-1)】k-近邻算法原理及python实现
笔者本人是个初入机器学习的小白,主要是想把学习过程中的大概知识和自己的一些经验写下来跟大家分享,也可以加强自己的记忆,有不足的地方还望小伙伴们批评指正,点赞评论走起来~ 文章目录 1.k-近邻算法概述 ...
- 【机器学习实战学习笔记(2-2)】决策树python3.6实现及简单应用
文章目录 1.ID3及C4.5算法基础 1.1 计算香农熵 1.2 按照给定特征划分数据集 1.3 选择最优特征 1.4 多数表决实现 2.基于ID3.C4.5生成算法创建决策树 3.使用决策树进行分 ...
- 【机器学习实战学习笔记(1-2)】k-近邻算法应用实例python代码
文章目录 1.改进约会网站匹配效果 1.1 准备数据:从文本文件中解析数据 1.2 分析数据:使用Matplotlib创建散点图 1.3 准备数据:归一化特征 1.4 测试算法:作为完整程序验证分类器 ...
- 机器学习实战 - 读书笔记(13) - 利用PCA来简化数据
前言 最近在看Peter Harrington写的"机器学习实战",这是我的学习心得,这次是第13章 - 利用PCA来简化数据. 这里介绍,机器学习中的降维技术,可简化样品数据. ...
- 机器学习实战 - 读书笔记(12) - 使用FP-growth算法来高效发现频繁项集
前言 最近在看Peter Harrington写的"机器学习实战",这是我的学习心得,这次是第12章 - 使用FP-growth算法来高效发现频繁项集. 基本概念 FP-growt ...
- 机器学习实战 - 读书笔记(11) - 使用Apriori算法进行关联分析
前言 最近在看Peter Harrington写的"机器学习实战",这是我的学习心得,这次是第11章 - 使用Apriori算法进行关联分析. 基本概念 关联分析(associat ...
- 机器学习实战 - 读书笔记(07) - 利用AdaBoost元算法提高分类性能
前言 最近在看Peter Harrington写的"机器学习实战",这是我的学习笔记,这次是第7章 - 利用AdaBoost元算法提高分类性能. 核心思想 在使用某个特定的算法是, ...
- TensorFlow机器学习框架-学习笔记-001
# TensorFlow机器学习框架-学习笔记-001 ### 测试TensorFlow环境是否安装完成-----------------------------```import tensorflo ...
- Redis in Action : Redis 实战学习笔记
1 1 1 Redis in Action : Redis 实战学习笔记 1 http://redis.io/ https://github.com/antirez/redis https://ww ...
随机推荐
- docker pull net/http: TLS handshake timeout错误解决
docker pull net/http: TLS handshake timeout 出现这个错误,原因很明显,我们在围城里,有两种解决办法,一种是用梯子爬围墙,一种是用国内源,下面用国内源 e ...
- 【MIG专项测试组】如何准确评测Android应用的流畅度?
转自 腾讯Bugly 叶方正,2008年加入腾讯,就职于无线研发部[专项测试组].曾经负责多个产品的性能优化工作,积累大量的移动终端平台优化以及评测经验. 怎样获取SM值? 前文我们分析了通过测量应用 ...
- PHP中Soap模块安装与使用例子
PHP5中的这个SOAP扩展目的是为了实现PHP对Web services的支持.与其它实现PHP对Web services的支持的方法不同,SOAP扩展是用C写的,因此它比其它方法具有速度优势 SO ...
- 【ubantu】在ubantu下如何对svn进行操作命令
ubantu对svn进行操作命令,如下所示: 1.将文件checkout到本地目录svn checkout path(path是服务器上的目录)例如:svn checkout svn://192.16 ...
- 原创:解决 python中moviepy调用ffmpeg的错误:subprocess, PermissionError: [WinError 5] 拒绝访问
近期运行一个python程序用到了moviepy.editor.VideoFileClip() moviepy基于ffmpeg,但是并不是pip安装的ffmepg, 执行 import imageio ...
- COM对象模型
COM对象内存布局,多继承是虚继承吗? 接口之间怎么切换? 1) 是普通的多继承,不是虚继承.因为父类接口只是含有纯虚函数,不含任何数据成员,所以问题不大. 2) QueryInterface可以用来 ...
- 多媒体开发之---开源库ffmeg的log之子解析
用了ffmeg快两年了,对其中的log甚是感兴趣,今天在做8148项目是,解读h264结构,看了<毕-新一代视频压缩编码标准h246> ,在第六章中的重排序里面看到了好熟悉的4x4矩阵zi ...
- zendstudio的安装和破解
参考博客地址:http://www.oxox.work/web/php-basic/zendstudio/ 注明:还未验证
- html 自动跳转,meat(http-equiv)标签详解
http-equiv顾名思义,相当于http的文件头作用,它可以向浏览器传回一些有用的信息,以帮助正确和精确地显示网页内容,与之对应的属性值为content,content中的内容其实就是各个参数的变 ...
- phpcms的基础知识和配置
一.设置界面 1.站点设置:相当于服务器上的站点 (1)站点修改:“关键词”和“描述”的修改,便于网络优化和搜索引擎对本网站的搜索. (2)点击站点后边的修改,模板的修改,引用自己模板 2.基本设置: ...