2018-2019-1 20189215《Linux内核原理与分析》第三周作业
《庖丁解牛》第二章书本知识总结
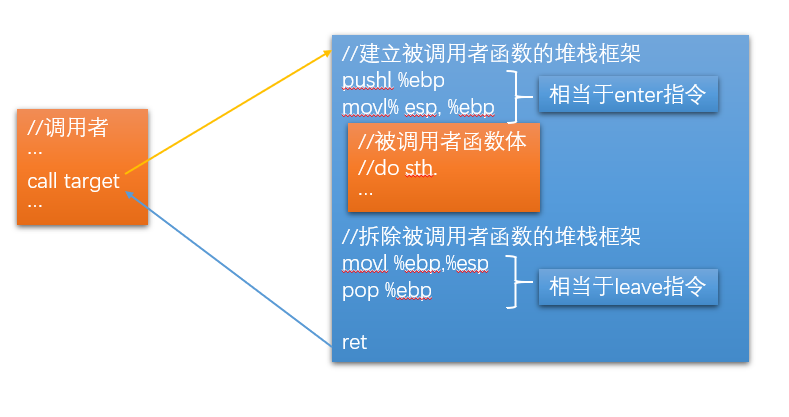
函数调用框架
call指令有两个作用:
(1) 将CS:EIP中下一条指令的地址A保存在栈顶;
(2)设置CS:EIP指向被调用程序的第一行。
ret指令在被调用函数完成之后,将地址A恢复到CS:EIP中。
传递参数
因为存储参数使用堆栈,根据后入先出的规则,传递参数的方法是从右到左依次压栈。计算机的3大法宝:存储程序计算机、函数调用堆栈机制、中断。
内嵌汇编语法规则
asm volatile (
汇编语句:
输出部分: //需要在行首加上冒号:
输入部分: //需要在行首加上冒号:
破环描述部分
)
(1)volatile是告诉编译器不要优化代码
(2)汇编代码嵌入时和直接方式有些许不同,体现在%转义符号。寄存器前面会有两个%,而%加数字则表示在输出部分、输入部分、破环描述部分的编号,从零开始,最高到总个数-1。
(3)一些符号
"c"、"d"等符号分别表示寄存器
ecx、edx。
"r"表示将输入变量放到通用寄存器,也就是eax、ebx、ecx、edx、esi、edi中的一个。
"="表示操作数在指令中是只写的,输出操作数。
"+"表示输入输出操作数是读写类型的。
"m"表示内存变量。
实验:mykernel时间片轮转多道程序内核
- 进入实验楼实验,在终端中分别输入以下命令
cd LinuxKernel/linux-3.9.4
rm -rf mykernel
patch -p1 < ../mykernel_for_linux3.9.4sc.patch //打补丁
make allnoconfig
make //编译内核时间较长
qemu -kernel arch/x86/boot/bzImage
make过程如下图:
make成功后mykernel运行:
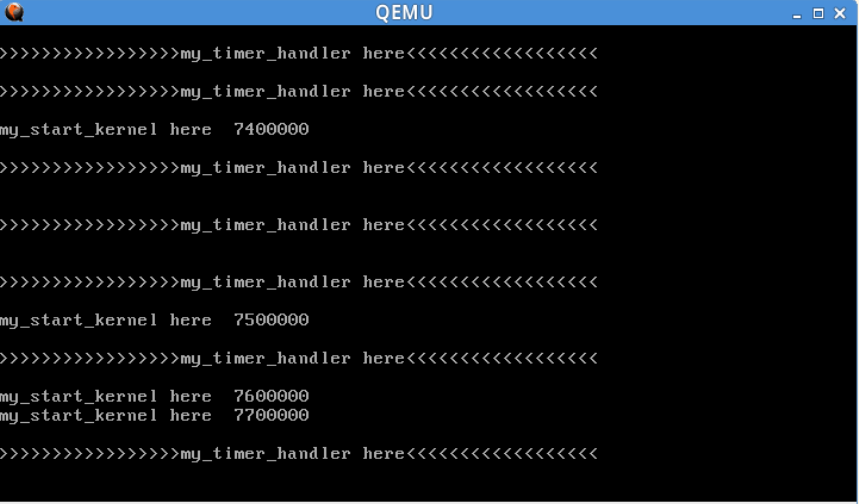
- 在mykernel的基础上添加
mypcb.h,修改mymain.c和myinterrupt.c文件,实现一个简单的操作系统内核,设置为时钟中断发生100次时,将需要调度的flagmy_need_sched设置为1。运行结果如下:

mykernel时间片轮转代码分析
实验中,基于mykernel,添加了
mypcb.h,修改mymain.c和myinterrupt.c文件,下面对这三个文件的代码进行分析。
- mypcb.h头文件
#define MAX_TASK_NUM 4
#define KERNEL_STACK_SIZE 1024*8
/* CPU-specific state of this task */
struct Thread {
unsigned long ip; //对应eip
unsigned long sp; //对应esp
};
typedef struct PCB{
int pid; //定义进程id
volatile long state; //-1 unrunnable, 0 runnable, >0 stopped
char stack[KERNEL_STACK_SIZE]; //内核堆栈
/* CPU-specific state of this task */
struct Thread thread;
unsigned long task_entry; //入口
struct PCB *next;
}tPCB;
void my_schedule(void); //声明调度函数
这段代码主要定义了进程控制块PCB,包括:
pid:进程id
state:进程状态,初始化值就是-1,如果被调度运行起来,其值就会变成0 ,被终端后,其值>0
stack:本进程使用的堆栈
thread:当前正在执行的线程信息
task_entry:进程入口函数
next:指向下一个PCB,实验环境中所有的PCB是以链表的形式组织起来的。
- mymain.c文件
#include <linux/types.h>
#include <linux/string.h>
#include <linux/ctype.h>
#include <linux/tty.h>
#include <linux/vmalloc.h>
#include "mypcb.h"
tPCB task[MAX_TASK_NUM]; //PCB的数组task
tPCB * my_current_task = NULL; //当前task指针
volatile int my_need_sched = 0; //是否需要调度
void my_process(void); //my_process函数声明
void __init my_start_kernel(void) //mykernel内核代码的入口
{
int pid = 0;
int i;
/* 初始化0号进程*/
task[pid].pid = pid;
task[pid].state = 0;/* -1 unrunnable, 0 runnable, >0 stopped */
task[pid].task_entry = task[pid].thread.ip = (unsigned long)my_process;
task[pid].thread.sp = (unsigned long)&task[pid].stack[KERNEL_STACK_SIZE-1];
task[pid].next = &task[pid];
/*fork其他进程 */
for(i=1;i<MAX_TASK_NUM;i++)
{
memcpy(&task[i],&task[0],sizeof(tPCB));
task[i].pid = i;
task[i].state = -1;
task[i].thread.sp = (unsigned long)&task[i].stack[KERNEL_STACK_SIZE-1];
task[i].next = task[i-1].next;
task[i-1].next = &task[i];
}
/* 用task[0]开始0号进程 */
pid = 0;
my_current_task = &task[pid];
asm volatile(
"movl %1,%%esp\n\t" /* set task[pid].thread.sp to esp */
"pushl %1\n\t" /* push ebp */
"pushl %0\n\t" /* push task[pid].thread.ip */
"ret\n\t" /* pop task[pid].thread.ip to eip */
"popl %%ebp\n\t"
:
: "c" (task[pid].thread.ip),"d" (task[pid].thread.sp) /* input c or d mean %ecx/%edx*/
);
}
void my_process(void)
{
int i = 0;
while(1)
{
i++;
if(i%10000000 == 0)
{
printk(KERN_NOTICE "this is process %d -\n",my_current_task->pid);
if(my_need_sched == 1) //判断是否需要调度
{
my_need_sched = 0;
my_schedule(); //这是一个主动调度
}
printk(KERN_NOTICE "this is process %d +\n",my_current_task->pid);
}
}
}
本实验环境中,mykernel是内核代码的入口,负责初始化内核的各个组成部分,在实际的Linux内核中,入口为init/main.c中的start_kernel(void)函数。
在本实验环境中,每个进程的函数都是 my_process函数,进程在运行中打印当前进程号,并通过my_need_sched变量判断是否需要调度,这是在myinterrupt.c文件中进行赋值的一个变量。
下面对0号进程的启动进行分析:
1"movl %1,%%esp\n\t" %1指第2个输入输出"d" (task[pid].thread.sp),将进程的栈顶位置存入ESP寄存器
2"pushl %1\n\t" 将task[0].thread.sp压栈,即保存当前EBP值
3"pushl %0\n\t" 将task[0].thread.ip压栈,当前进程的EIP值入栈
4"ret\n\t" 将栈顶值取出到EIP寄存器,即刚刚入栈的0号进程ip值
5 "popl %%ebp\n\t" 在执行完其他进程之后,回到0号进程,释放栈空间
6 : 没有输出
7 : "c" (task[pid].thread.ip),"d" (task[pid].thread.sp) 输入,将0号进程的ip、sp值分别存入ecx、edx寄存器中。
- myinterrupt.c文件
#include <linux/types.h>
#include <linux/string.h>
#include <linux/ctype.h>
#include <linux/tty.h>
#include <linux/vmalloc.h>
#include "mypcb.h"
extern tPCB task[MAX_TASK_NUM]; //extern引用全局变量
extern tPCB * my_current_task;
extern volatile int my_need_sched;
volatile int time_count = 0;
void my_timer_handler(void) //时钟中断触发本函数
{
#if 1
if(time_count%100 == 0 && my_need_sched != 1) //当时钟中断发生100次,并且my_need_sched不为1时,赋值为1
{
printk(KERN_NOTICE ">>>my_timer_handler here<<<\n");
my_need_sched = 1;
}
time_count ++ ;
#endif
return;
}
void my_schedule(void)
{
tPCB * next; //下一进程
tPCB * prev; //当前进程
if(my_current_task == NULL
|| my_current_task->next == NULL)
{
return;
}
printk(KERN_NOTICE ">>>my_schedule<<<\n");
/* schedule */
next = my_current_task->next;
prev = my_current_task;
if(next->state == 0)/* -1 unrunnable, 0 runnable, >0 stopped */ //下一个进程可运行,执行进程切换
{
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<\n",prev->pid,next->pid);
/* 切换进程 */
asm volatile(
"pushl %%ebp\n\t" /* save ebp */
"movl %%esp,%0\n\t" /* save esp */
"movl %2,%%esp\n\t" /* restore esp */
"movl $1f,%1\n\t" /* save eip */
"pushl %3\n\t"
"ret\n\t" /* restore eip */
"1:\t" /* next process start here */
"popl %%ebp\n\t"
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
}
else
{
next->state = 0;
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<\n",prev->pid,next->pid);
/* switch to new process */
asm volatile(
"pushl %%ebp\n\t" /* save ebp */
"movl %%esp,%0\n\t" /* save esp */
"movl %2,%%esp\n\t" /* restore esp */
"movl %2,%%ebp\n\t" /* restore ebp */
"movl $1f,%1\n\t" /* save eip */
"pushl %3\n\t"
"ret\n\t" /* restore eip */
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
}
return;
}
myinterrupt.c包含my_timer_handler和my_schedule两个函数。 my_timer_handler每隔100次将my_need_sched赋值为1,等待mymain.c中my_process函数的主动调度。my_schedule保存恢复进程上下文。
切换进程的分析:
01 "pushl %%ebp\n\t 保存当前ebp到堆栈中
02 "movl %%esp,%0\n\t" 保存当前ESP到当前进程sp中
03 "movl %2,%%esp\n\t" esp指向下一个进程
04 "movl $1f,%1\n\t" 将1f存储到thread.ip中,$1f是标号“1:\t”处,再次调度到该进程时就会从1:开始执行
05 "pushl %3\n\t" 将下一个进程的ip入栈
06 "ret\n\t" eip指向下一个进程的起始地址,也做了一次出栈操作
07 "1:\t" 标号1:,即next进程开始执行的位置
08 "popl %%ebp\n\t" 待下一个进程执行完后释放栈空间,恢复现场
09 : "=m" (prev->thread.sp),"=m" (prev->thread.ip) %0、%1分别对应,m代表内存变量
10 : "m" (next->thread.sp),"m" (next->thread.ip) %2、%3分别对应
遇到的问题
- 实验中修改代码后,make找不到文件。
解决:修改代码是在/mykernel目录下进行修改的,make编译内核需要在LinuxKernel/linux-3.9.4目录下进行,修改完之后要cd ..。 - 不懂myinterrupt.c文件中
my_timer_handler函数在哪调用。
解决:仔细看了书上的35页,在实验环境中已经配置好了一个时钟中断,在时钟中断发生的时候就会调用一次该函数。 - 不懂
$1f的含义。
解决:查阅资料得知,"movl $1f,%1\n\t"是将进程原来的ip替换为$1f,是at&t的一种语法,f代表向后跳转(b表示向前,f表示向后),1f指的就是下一条指令,即当前进程的eip。
2018-2019-1 20189215《Linux内核原理与分析》第三周作业的更多相关文章
- 2019-2020-1 20199329《Linux内核原理与分析》第九周作业
<Linux内核原理与分析>第九周作业 一.本周内容概述: 阐释linux操作系统的整体构架 理解linux系统的一般执行过程和进程调度的时机 理解linux系统的中断和进程上下文切换 二 ...
- 2019-2020-1 20199329《Linux内核原理与分析》第二周作业
<Linux内核原理与分析>第二周作业 一.上周问题总结: 未能及时整理笔记 Linux还需要多用 markdown格式不熟练 发布博客时间超过规定期限 二.本周学习内容: <庖丁解 ...
- 20169212《Linux内核原理与分析》第二周作业
<Linux内核原理与分析>第二周作业 这一周学习了MOOCLinux内核分析的第一讲,计算机是如何工作的?由于本科对相关知识的不熟悉,所以感觉有的知识理解起来了有一定的难度,不过多查查资 ...
- 20169210《Linux内核原理与分析》第二周作业
<Linux内核原理与分析>第二周作业 本周作业分为两部分:第一部分为观看学习视频并完成实验楼实验一:第二部分为看<Linux内核设计与实现>1.2.18章并安装配置内核. 第 ...
- 2018-2019-1 20189221 《Linux内核原理与分析》第九周作业
2018-2019-1 20189221 <Linux内核原理与分析>第九周作业 实验八 理理解进程调度时机跟踪分析进程调度与进程切换的过程 进程调度 进度调度时机: 1.中断处理过程(包 ...
- 2017-2018-1 20179215《Linux内核原理与分析》第二周作业
20179215<Linux内核原理与分析>第二周作业 这一周主要了解了计算机是如何工作的,包括现在存储程序计算机的工作模型.X86汇编指令包括几种内存地址的寻址方式和push.pop.c ...
- 2019-2020-1 20209313《Linux内核原理与分析》第二周作业
2019-2020-1 20209313<Linux内核原理与分析>第二周作业 零.总结 阐明自己对"计算机是如何工作的"理解. 一.myod 步骤 复习c文件处理内容 ...
- 2018-2019-1 20189221《Linux内核原理与分析》第一周作业
Linux内核原理与分析 - 第一周作业 实验1 Linux系统简介 Linux历史 1991 年 10 月,Linus Torvalds想在自己的电脑上运行UNIX,可是 UNIX 的商业版本非常昂 ...
- 《Linux内核原理与分析》第一周作业 20189210
实验一 Linux系统简介 这一节主要学习了Linux的历史,Linux有关的重要人物以及学习Linux的方法,Linux和Windows的区别.其中学到了LInux中的应用程序大都为开源自由的软件, ...
- 2018-2019-1 20189221《Linux内核原理与分析》第二周作业
读书报告 <庖丁解牛Linux内核分析> 第 1 章 计算工作原理 1.1 存储程序计算机工作模型 1.2 x86-32汇编基础 1.3汇编一个简单的C语言程序并分析其汇编指令执行过程 因 ...
随机推荐
- 数据提交方式:post和get
众所周知,在B/S应用程序中,前台与后台的数据交互,都是通过HTML中Form表单完成的.而Form提供了两种数据传输的方式——get和post. Get请求表示客户端请求一个ur ...
- poj_2315 最小费用最大流
题目大意 一个图上有N个顶点,从1到N标号,顶点之间存在一些无向边,边有长度,要求从顶点1走到顶点N,再从顶点N走回顶点1,其中不必要经过每个顶点,但是要求走的路径上的边只能经过一次.求出从1---& ...
- Excel 2010 如何将筛选后的数据复制粘贴到另一个工作表筛选后的表格里
如果你是指自动筛选后,把筛选数据复制/粘贴到另外一个工作表中,不妨试试试 第一步选中筛选后的数据区域:第二步执行菜单命令“编辑/定位/定位条件/可见单元格”,确定:第三步单击复制按钮或者Ctrl+C或 ...
- Android 获取系统默认输入法
import android.provider.Settings; import android.text.TextUtils; 获取默认输入法包名: private String getDefaul ...
- 图论之最短路径(3)队列优化的Bellman-Ford算法(SPFA算法)
在Bellman-Ford算法中 我们可以看到大量的优化空间:如果一个点的最短路径已经确定了,那么它就不会再改变,因此不需要再处理.换句话说:我们每次只对最短路径改变了的顶点的所有出边进行操作 使用一 ...
- ATDD和TDD的区别是什么?
最近看到一个新名词"ATDD",全称"Acceptance Test Driven Development ",中文称"验收测试驱动开发". ...
- 关于word文档转成html网页的方法
在工作中,有时我们可能需要将一个word文档转换成html网页格式,如在写帮助文档的时候,采用office编写,最终却想以网页的格式传到网站的指定目录下供网友直接浏览 这时我们就需要对word文件进行 ...
- 【BZOJ1879】[Sdoi2009]Bill的挑战 状压DP
[BZOJ1879][Sdoi2009]Bill的挑战 Description Input 本题包含多组数据. 第一行:一个整数T,表示数据的个数. 对于每组数据: 第一行:两个整数,N和K(含 ...
- 【BZOJ3932】[CQOI2015]任务查询系统 主席树
[BZOJ3932][CQOI2015]任务查询系统 Description 最近实验室正在为其管理的超级计算机编制一套任务管理系统,而你被安排完成其中的查询部分.超级计算机中的 任务用三元组(Si, ...
- 解决:Bitmap too large to be uploaded into a texture exception
前几天拿锤子手机做测试,启动页面的闪屏直接黑屏.. 所以看下日志,百度一下 找到解决方案,特此记录. 简单说就是硬件加速的时候,对图片的大小有限制.不同设备可能有不同的最大值.这个问题悲催的地方是,程 ...