【转载】 机器人真·涨姿势了:比肩人类抓取能力,上海交大、非夕科技联合提出全新方法AnyGrasp
原文地址:
https://developer.aliyun.com/article/822654
=================================================
基于视觉的机器人通用抓取,一直是学界和业界的关注重点,也是机器人智能领域亟待解决的问题之一。
针对物体抓取,业界通常需要先对物体进行三维建模,然后训练网络,在实际中先进行位姿检测,再进行抓取

我们能否期待一个通用算法,能像人类一样具备面向任意场景、任意物体的抓取能力?
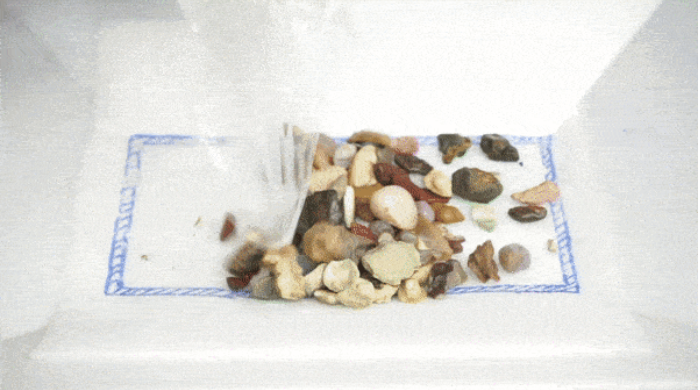
譬如,当杯子被敲碎,每个碎片都是未曾出现过的,机器人可以将这些从未见过、更未被建模的碎片一片片捡起来:

更极端的,如果光照情况不好,同时有探照灯的干扰,桌面还会变化,机器人能不能稳定地抓取?
在这些方面,尚且没有研究能达到稳定的抓取效果,甚至没有前期可论证的 DEMO。此前来自 UCB 的研究团队发表于《Science Robotics》的成果
DexNet4.0 [2],也只局限于低自由度的垂直抓取,同时需要搭配价值数万元的工业级高精度深度相机,计算一次耗时数十秒。
近日,上海交大-非夕科技联合实验室在 ICRA 大会上展示了最新研究成果
「AnyGrasp」,基于二指夹爪的通用物体抓取。这是第一次机器人对于任意场景的任意物体,有了比肩人类抓取的能力,无需物体 CAD 模型与检测的过程,对硬件构型、相机也没有限制。
仅需要一台 1500 元的 RealSense 深度相机,AnyGrasp 即可在数十毫秒的时间内,得到其观测视野内整个场景的数千个抓取姿态,且均为六自由度,以及一个额外的宽度预测。在五小时复杂堆叠场景的抓取中,单臂 MPPH(Mean Pick Per Hour, 单位小时内平均抓取次数)可达到 850+,为 DexNet4.0 的三倍多,这是该指标第一次在复杂场景抓取上接近人类水平(900-1200 MPPH)。
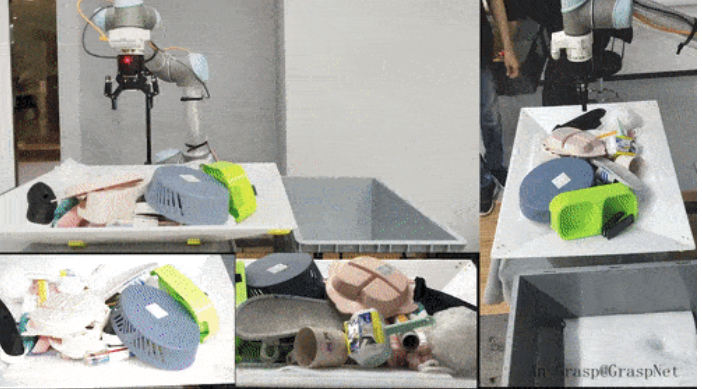
以下为搭载 AnyGrasp 的最新成果展示,在六轴机械臂上:
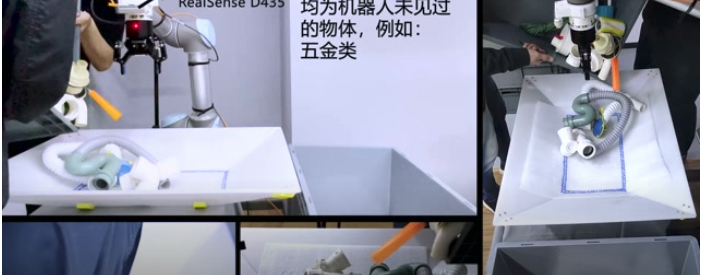
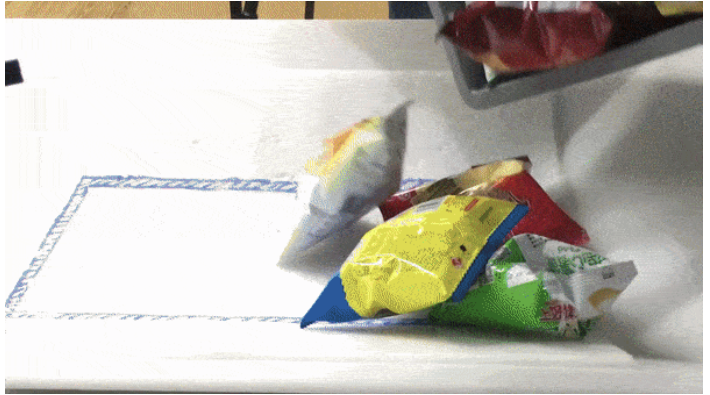
在ICRA2021的展区内,搭载AnyGrasp的机器人更是走出了实验室,在现场直接对没见过的物体进行抓取,同时与参会观众进行互动,由现场观众自由发挥,用随身的物品、捏的橡皮泥对它进行考验,机器人都能进行稳定的抓取。

研究团队介绍,目前 AnyGrasp 有以下优势:
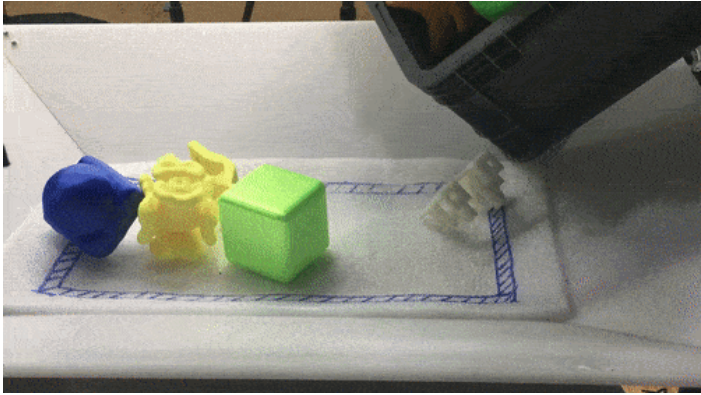
- 普适性:对未曾见过、复杂场景中的任意物体均可抓取,包括刚体、可变形物体、无纹理的物体等;
- 高速度:数十毫秒内即可生成数千个稳定的抓取姿态;
- 稳定性:对背景、光照、桌面角度等不敏感;
- 低成本:无需高精度工业相机,千元价位的深度相机(如 Intel RealSense)即可胜任。
技术层面上,AnyGrasp 的实现是基于研究团队提出的一个全新方法论,即真实感知与几何分析的孪生联结。真实感知与密集几何标注原本是矛盾的两方面,因为真实感知往往需要人工标注,而几何分析需依赖仿真环境,此前未曾有团队在这方面进行过尝试。
在 CVPR 2020 会议上,上海交大团队提出了 GraspNet-1Billion 数据集 [3],其中包含数万张单目摄像头采集的真实场景的 RGBD 图像,每张图片中包含由基于物理受力分析得到的数十万个抓取点,数据集中总共包含超过十亿有效抓取姿态。为了达到真实感知与几何分析的孪生联结目标,团队设计了一个半自动化的数据收集与标注方法,使得大规模地生成包含真实视觉感知与物理分析标签的数据成为可能。该数据集及相关代码目前已经开源。
基于 GraspNet-1Billion 数据集,团队开发了一套新的可抓取性(graspness)嵌入端到端三维神经网络结构,在单目点云上直接预测整个场景可行的抓取姿态,根据采样密度,抓取姿态可从数千到数万不等,整个过程仅需数十毫秒。基于全场景的密集的抓取姿态,后续任务可根据目标及运动约束选择合适的抓取位姿。

【转载】 机器人真·涨姿势了:比肩人类抓取能力,上海交大、非夕科技联合提出全新方法AnyGrasp的更多相关文章
- 【转载】ASP.NET以Post方式抓取远程网页内容类似爬虫功能
使用HttpWebRequest等Http相关类,可以在应用程序中或者网站中模拟浏览器发送Post请求,在请求带入相应的Post参数值,而后请求回远程网页信息.实现这一功能也很简单,主要是依靠Http ...
- python微信聊天机器人改进版,定时或触发抓取天气预报、励志语录等,向好友推送
最近想着做一个微信机器人,主要想要实现能够每天定时推送天气预报或励志语录,励志语录要每天有自动更新,定时或当有好友回复时,能够随机推送不同的内容.于是开始了分析思路.博主是采用了多线程群发,因为微信对 ...
- 【转载】浅谈HTTPS以及Fiddler抓取HTTPS协议
最近想尝试基于Fiddler的录制功能做一些接口的获取和处理工作,碰到的一个问题就是简单连接Fiddler只能抓取HTTP协议,关键的登录请求等HTTPS协议都没有捕捉到,所以想让Fiddler能够同 ...
- 记一次企业级爬虫系统升级改造(二):基于AngleSharp实现的抓取服务
爬虫系统升级改造正式启动: 在第一篇文章,博主主要介绍了本次改造的爬虫系统的业务背景与全局规划构思: 未来Support云系统,不仅仅是爬虫系统,是集爬取数据.数据建模处理统计分析.支持全文检索资源库 ...
- Fiddler: 如何抓取HTTPS协议的网页
作者:韦玮 转载请注明出处 Fiddler默认只能抓取HTTP协议的网页,不能抓取HTTPS协议的网页,而我们很多时候,都需要抓HTTPS协议的网页,比如抓淘宝数据等.今天,韦玮老师会为大家讲解如何 ...
- Heritrix源码分析(十四) 如何让Heritrix不间断的抓取(转)
欢迎加入Heritrix群(QQ):109148319,10447185 , Lucene/Solr群(QQ) : 118972724 本博客已迁移到本人独立博客: http://www.yun5u ...
- 使用java开源工具httpClient及jsoup抓取解析网页数据
今天做项目的时候遇到这样一个需求,需要在网页上展示今日黄历信息,数据格式如下 公历时间:2016年04月11日 星期一 农历时间:猴年三月初五 天干地支:丙申年 壬辰月 癸亥日 宜:求子 祈福 开光 ...
- 苹果icloud邮箱抓取
1 icloud登录,与其他网站登录区别 1.1 支持pop抓取的邮箱:pop提供统一接口,抓取简单: 1.2 没有前端js加密的邮箱(139,126,163):只要代码正确模拟登录流程,参数正确 ...
- 基于Casperjs的网页抓取技术【抓取豆瓣信息网络爬虫实战示例】
CasperJS is a navigation scripting & testing utility for the PhantomJS (WebKit) and SlimerJS (Ge ...
- 基于angularJs的单页面应用seo优化及可抓取方案原理分析
公司使用angularJs(以下都是指ng1)框架做了互联网应用,之前没接触过seo,突然一天运营那边传来任务:要给网站做搜索引擎优化,需要研发支持.搜了下发现单页面应用做seo比较费劲,国内相关实践 ...
随机推荐
- 判断是否有数据的sql优化
根据某一条件从数据库表中查询 『有』与『没有』,只有两种状态,那为什么在写SQL的时候,还要SELECT count(*)呢? 多次REVIEW代码时,发现如现现象: 业务代码中,需要根据一个或多个条 ...
- SD-WAN中二层组网与三层组网的区别
前言 随着企业网络需求的不断增长和变化,SD-WAN作为一种现代网络技术,为企业提供了更灵活.高效的网络解决方案.在SD-WAN中,二层组网和三层组网是两种常见的部署模型,它们有着各自的特点和适用场景 ...
- vite+vue3+ts+elementPlus前端框架搭建 [三] router路由管理
路由包括动态路由.静态路由两种,本文中以静态路由的方式实现了动态路由. 1. 创建Router 在Src目录下创建router文件夹,并在router文件夹下创建index.ts文件. index.t ...
- ecnuoj 5042 龟速飞行棋
5042. 龟速飞行棋 题目链接:5042. 龟速飞行棋 赛中没过,赛后补题时由于题解有些抽象,自己写个题解. 可以发现每次转移的结果只跟后面两个点的胜负状态有关. 不妨设 \(f_{u,a,b}\) ...
- 如何用matlab求隐式函数的导数
如何用matlab求隐式函数的导数 隐函数求导的例子 假设有一个圆 \(x^2+y^2=5\) , 要求在某个点上的切线的斜率. 我们可以把式\(x^2+y^2=5\)中的每一项对\(x\)求导, 可 ...
- Netty(二)线程模型
1. Netty概述 虽然Java已经提供了NIO,但原生NIO仍存在部分问题: NIO的类库和API繁杂,使用麻烦.需要熟练掌握Selector.ServerSocketChannel.Socket ...
- 高通与At指令:ATFWD解析
背景 本章的内容是适用于AP侧AT指令开发调试的有关人员. 主要是介绍高通实现的ATFWD框架.在这需要说明一下的是,或许你对AT Command很了解了,但是却貌似都不知道ATFWD,这很正常,严格 ...
- 机器学习(四)——Lasso线性回归预测构建分类模型(matlab)
Lasso线性回归(Least Absolute Shrinkage and Selection Operator)是一种能够进行特征选择和正则化的线性回归方法.其重要的思想是L1正则化:其基本原理为 ...
- 首届 DIVE 精彩回顾丨践行企业数字化,基础软件如何创新
"墙高基下,虽得必失."在构建数字企业大厦的工程中,基础软件的重要性不言而喻.但对于各行各业而言,面向传统经营模式设计的基础软件已经难以支撑数字业务的创新,唯有汲取专业团队的经验, ...
- canvas绘制飞线效果
在我们做的可视化大屏项目中,经常会遇到飞线的效果. 在我们的大屏编辑器中,可以通过拖拽+配置参数的方式很快就能够实现.下面是我们使用大屏编辑器实现的一个项目效果: 中间地图就有飞线的效果. 抛开编辑器 ...