action通信机制

当service通信不能很好的完成任务时候, actionlib则可以比较适合实现长时间的通信过
程, actionlib通信过程可以随时被查看过程进度, 也可以终止请求, 这样的一个特性, 使得它
在一些特别的机制中拥有很高的效率。
1、通信原理
Action的工作原理是client-server模式, 也是一个双向的通信模式。 通信双方在ROS
Action Protocol下通过消息进行数据的交流通信。 client和server为用户提供一个简单的
API来请求目标( 在客户端) 或通过函数调用和回调来执行目标( 在服务器端) 。
工作模式的结构示意图如下:
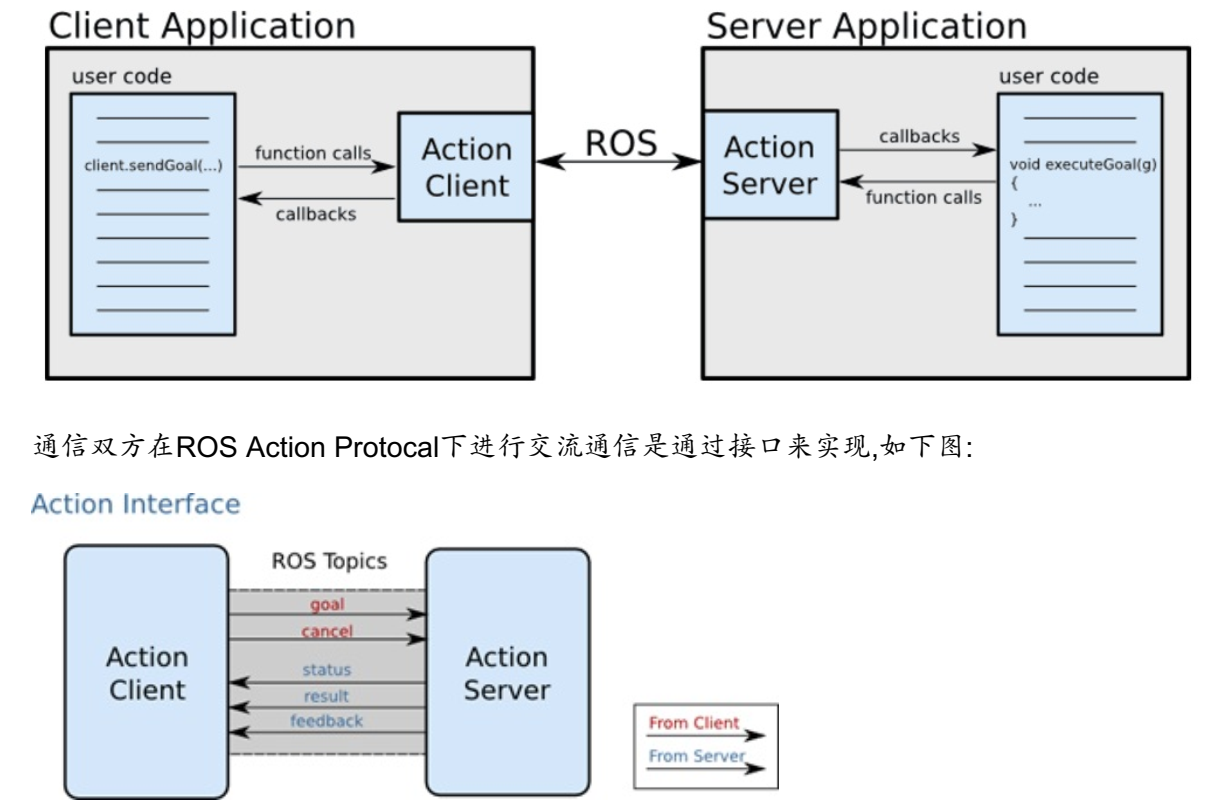
我们可以看到,客户端会向服务器发送目标指令和取消动作指令,而服务器则可以给客户端发送
实时的状态信息,结果信息,反馈信息等等,从而完成了service没法做到的部分.
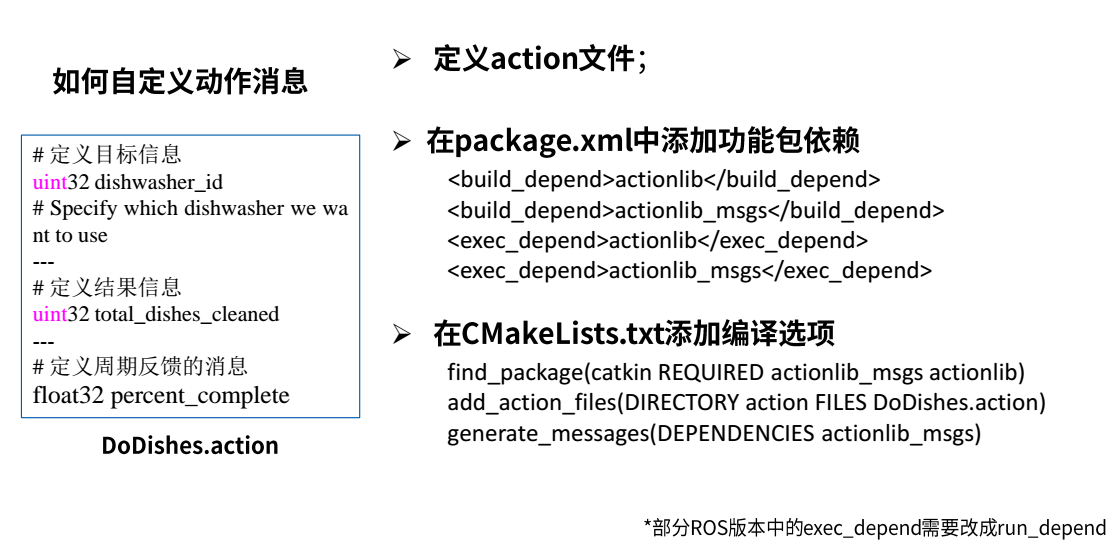
2、Action 规范
利用动作库进行请求响应, 动作的内容格式应包含三个部分, 目标、 反馈、 结果。
目标
机器人执行一个动作, 应该有明确的移动目标信息, 包括一些参数的设定, 方向、 角度、 速
度等等。 从而使机器人完成动作任务。
反馈
在动作进行的过程中, 应该有实时的状态信息反馈给服务器的实施者, 告诉实施者动作完成
的状态, 可以使实施者作出准确的判断去修正命令。
结果
当运动完成时, 动作服务器把本次运动的结果数据发送给客户端, 使客户端得到本次动作的
全部信息, 例如可能包含机器人的运动时长, 最终姿势等等
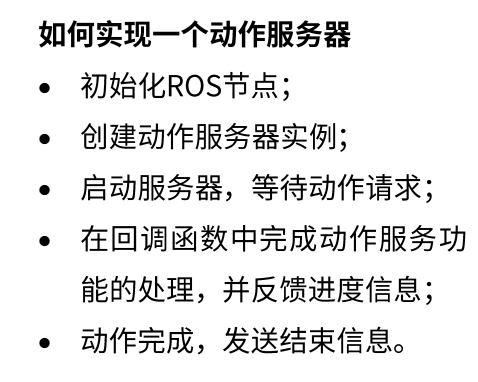
#include <ros/ros.h>
#include <actionlib/server/simple_action_server.h>
#include "learning_communication/DoDishesAction.h" typedef actionlib::SimpleActionServer<learning_communication::DoDishesAction> Server; // 收到action的goal后调用该回调函数
void execute(const learning_communication::DoDishesGoalConstPtr& goal, Server* as)
{
ros::Rate r();
learning_communication::DoDishesFeedback feedback; ROS_INFO("Dishwasher %d is working.", goal->dishwasher_id); // 假设洗盘子的进度,并且按照1hz的频率发布进度feedback
for(int i=; i<=; i++)
{
feedback.percent_complete = i * ;
as->publishFeedback(feedback);
r.sleep();
} // 当action完成后,向客户端返回结果
ROS_INFO("Dishwasher %d finish working.", goal->dishwasher_id);
as->setSucceeded();
} int main(int argc, char** argv)
{
ros::init(argc, argv, "do_dishes_server");
ros::NodeHandle n; // 定义一个服务器
Server server(n, "do_dishes", boost::bind(&execute, _1, &server), false); // 服务器开始运行
server.start(); ros::spin(); return ;
}
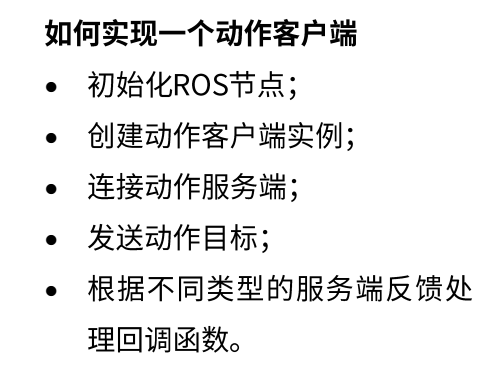
#include <actionlib/client/simple_action_client.h>
#include "learning_communication/DoDishesAction.h" typedef actionlib::SimpleActionClient<learning_communication::DoDishesAction> Client; // 当action完成后会调用该回调函数一次
void doneCb(const actionlib::SimpleClientGoalState& state,
const learning_communication::DoDishesResultConstPtr& result)
{
ROS_INFO("Yay! The dishes are now clean");
ros::shutdown();
} // 当action激活后会调用该回调函数一次
void activeCb()
{
ROS_INFO("Goal just went active");
} // 收到feedback后调用该回调函数
void feedbackCb(const learning_communication::DoDishesFeedbackConstPtr& feedback)
{
ROS_INFO(" percent_complete : %f ", feedback->percent_complete);
} int main(int argc, char** argv)
{
ros::init(argc, argv, "do_dishes_client"); // 定义一个客户端
Client client("do_dishes", true); // 等待服务器端
ROS_INFO("Waiting for action server to start.");
client.waitForServer();
ROS_INFO("Action server started, sending goal."); // 创建一个action的goal
learning_communication::DoDishesGoal goal;
goal.dishwasher_id = ; // 发送action的goal给服务器端,并且设置回调函数
client.sendGoal(goal, &doneCb, &activeCb, &feedbackCb); ros::spin(); return ;
}
action通信机制的更多相关文章
- MEF插件系统中通信机制的设计和实现
MEF插件系统中通信机制的设计和实现 1.背景 一般的WinForm中通过C#自带的Event机制便能很好的实现事件的注册和分发,但是,在插件系统中却不能这么简单的直接用已有的类来完成.一个插件本不包 ...
- 我所理解的Android组件化之通信机制
之前写过一篇关于Android组件化的文章,<Android组件化框架设计与实践>,之前没看过的小伙伴可以先点击阅读.那篇文章是从实战中进行总结得来,是公司的一个真实项目进行组件化架构改造 ...
- 从AIDL开始谈Android进程间Binder通信机制
转自: http://tech.cnnetsec.com/585.html 本文首先概述了Android的进程间通信的Binder机制,然后结合一个AIDL的例子,对Binder机制进行了解析. 概述 ...
- flux沉思录:面向store和通信机制的前端框架
一.综述 Flux 被用来描述“单向”的数据流,且包含某些特殊的事件和监听器. 响应式编程是一种面向数据流和变化传播的编程范式 flux是响应式编程的一种? Flux 在本质上采用了模型-视图-控制器 ...
- .Net中Remoting通信机制简单实例
.Net中Remoting通信机制 前言: 本程序例子实现一个简单的Remoting通信案例 本程序采用语言:c# 编译工具:vs2013工程文件 编译环境:.net 4.0 程序模块: Test测试 ...
- .Net中Remoting通信机制
Remoting通信机制 Remoting介绍 主要元素 通道类型 激活方式 对象定义 Remoting介绍 什么是Remoting,简而言之,我们可以将其看作是一种分布式处理方式. 从微软的产品角度 ...
- 【单页应用之通信机制】view之间应该如何通信
前言 在单页应用中,view与view之间的通信机制一直是一个重点,因为单页应用的所有操作以及状态管理全部发生在一个页面上 没有很好的组织的话很容易就乱了,就算表面上看起来没有问题,事实上会有各种隐忧 ...
- Android多线程通信机制
掌握Android的多线程通信机制,我们首先应该掌握Android中进程与线程是什么. 1. 进程 在Android中,一个应用程序就是一个独立的进程(应用运行在一个独立的环境中,可以避免其他应用程序 ...
- Storm进程通信机制
storm的worker进程之间消息传递机制图: 每个worker都有一个独立的监听进程,监听配置文件中配置过的端口列表supervisor.slots.ports,topology.receiver ...
随机推荐
- UNP学习第五章(二)
一.POSIX信号处理 信号:告知某进程发生了某个事件的通知(软中断),通常是异步的. 信号可以:由进程发给另一个进程,由内核发给某个进程. 设置信号处理办法,有三个选择: 1.写一个函数,在信号发生 ...
- Delphi 正则表达式之TPerlRegEx
官方网站: http://www.regular-expressions.info/delphi.html 直接下载: http://www.regular-expressions.info/down ...
- CentOS 7 & php7.2安装 php-redis 扩展
CentOS 7 & php7.2安装 php-redis 扩展 1.下载phpredis-developcd /tmpwget https://codeload.github.com/php ...
- java并发编程笔记(二)——并发工具
java并发编程笔记(二)--并发工具 工具: Postman:http请求模拟工具 Apache Bench(AB):Apache附带的工具,测试网站性能 JMeter:Apache组织开发的压力测 ...
- Windows10系统下,如何彻底删除卸载MySQL
本文介绍,在Windows10系统下,如何彻底删除卸载MySQL... 1>停止MySQL服务开始->所有应用->Windows管理工具->服务,将MySQL服务停止.2> ...
- pandas 使用出现的问题汇总
问题1:<bound method NDFrame.head of 刚开始还以为是自己的数据集有问题,怎么显示不对呢! 解决: 仔细观察,是自己给的输出有问题,data.head什么鬼??? 正 ...
- java性能调优01
1.阿姆达尔定律 1.1 加速比=优化后的耗时/优化前的耗时 1.2 阿姆达尔定律 s<=1/F+(1-F)/N 其中:s为加速比,F为程序的串行化比重,n为cpu处理核数 2.调优层次(设 ...
- Linux/x86-64 - setuid(0) & chmod ("/etc/passwd", 0777) & exit(0) - 63 byes
/* Title: Linux/x86-64 - setuid(0) & chmod ("/etc/passwd", 0777) & exit(0) - 63 by ...
- CSS3新增(选择器{属性选择器,结构伪类选择器,伪元素选择器})
1.属性选择器 属性选择器,可以根据元素特定的属性来选择元素,这样就不用借助 类 或者 id选择器. E [ att ] 选择具有 att 属性的 E 元素 例如:input [ value ...
- JNI中修改(基本类型)参数并返回到Java层使用
最近在JNI相关项目中遇到一个问题:在Java层传入多个int类型的参数,在jni层修改参数值或地址之后重新返回到Java层.这应该算是基本知识了,尤其是基本类型的参数往往看似简单,所以在之前学习jn ...