【Duke-Image】Week_5 Segmentation
Chapter 10 Image Segmentation 图像分割
10.2.7 Edge Linking and Boundary Detection 边缘连接和边界检测
Global processing using the Hough transform 使用霍夫变换的全局处理
一种检测像素集是否位于指定形状的曲线上的方法,一旦检测到,这些曲线就会形成边缘或感兴趣的区域边界。
霍夫变换:考虑 \(xy\) 平面上的一个点 \((x_i,y_i)\) 和形式为 \(y_i = ax_i + b\) 的一条直线。通过点的直线有无数条,且对a和b的不同值都满足方程。将该等式写为,考虑ab平面也称参数空间,将得到固定点的单一直线的方程。此外,第二个点在参数空间中也有一条与之相关联的直线,除非他们是平行的,否则这条直线会和相关联的直线相交于点。

However,is that a(the slope of a line) approaches infinity as the line approaches the vertical direction.One way around this difficulty is to use the normal representation of a line:
\[ x cos\theta + y sin\theta = \rho \]Each sinusoidal curve in Figure 10.32(b) represents the family of lines that pass through a particular point \((x_k,y_k)\) in the xy-plane. The intersection point \((\rho^{\prime},\theta^{\prime})\) corresponds to the line that passes through both \((x_i,y_i)\) and \((x_j,y_j)\)。 \((\rho^{\prime},\theta^{\prime})\) 对应于通过 \((x_i,y_i)\) 和 \((x_j,y_j)\)的直线。
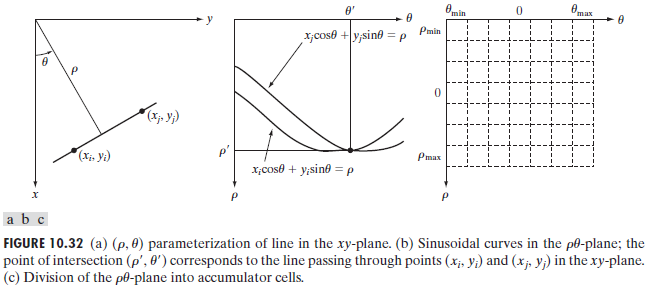
- The computational attractiveness of Hough transform arise from subdividing the $ \rho\theta $ parameter space into so-called accumulator cells(累加单元), as Fig.10.32(c)illustrates, where \((\rho\_{min},\rho\_{max})\) and \((\theta\_{min},\theta\_{max})\) are the expected ranges of the parameter values: \(-90^\circ \le \theta \le 90^\circ\) and \(-D \le \rho \le D\), where D is the maximum distance between opposite corners(对角线) in an image. The cell at coordinates \((i,j)\), with accumulator value \(A(i,j)\), corresponds to the square associated with parameter-space coordinates \((\rho_i,\theta_j)\). Initially, these cells are set to zero. Then, for every non-background point \((x_k,y_k)\) in the \(xy\)-plane, we let \(\theta\) equal each of the allowed subdivision values on the \(\theta\)-axis(令 \(\theta\) 等于 \(\theta\) 轴上每个允许的细分值) and solve for the corresponding \(\rho\) (解出相对应的 \(\rho\) ) using the equation \(\rho = x_kcos\theta + y_ksin\theta\). The resulting \(\rho\) values are then rounded off to the nearest allowed cell value along the \(\rho\) axis. If a choice of \(\theta_p\) results in solution \(\rho_q\), then we let \(A(p,q)=A(p,q)+1\). At the end of this procedure, a value of P in \(A(i,j)\) means that points in the \(xy\)-plane lie on the line \(xcos\theta_j + y sin\theta_j = \rho_i\). The number of subdivisions in the \(\rho\theta\)-plane determines the accuracy of the colinearity(共线性的精确性) of these points. It can be shown that the number of computations in the method just discussed is linear with respect to \(n\), the number of non-background points in the \(xy\)-plane.
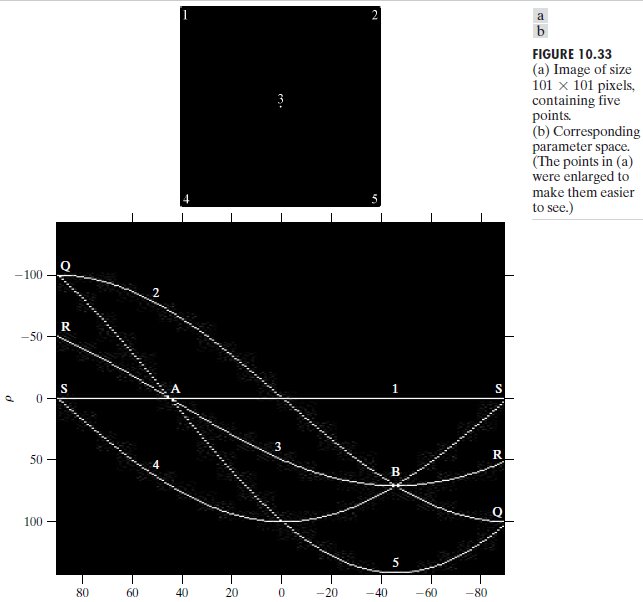
Example 图10.33(a)显示了一幅大小为101x101像素具有五个标记点的图像,图10.33(b)显示了将每个点映射到 \(\rho\theta\) 平面上的结果。其中A点和B点显示了霍夫变换的共线检测的性质。点A表示对应于xy图像平面内点1,3,5曲线的交点。点A的位置指出这三个点位于一条过原点且方向为45°的直线上。点B的位置指出点2,3,4位于方向为-45°且与原点的距离为\(\rho=71\)(即从原点到对角的对角线距离的一半)的直线上。最后,点Q、R、S表明霍夫变换展示了在参数空间左边缘和右边缘的一种反射邻接关系,这一性质是 \(\theta\) 和 \(\rho\) 在 \(\pm90°\) 边界改变符号的结果。
Although the focus thus far has been on straight lines, the Hough transform
is applicable to any function of the form \(g(v,c) = 0\) where v is a vector
of coordinates(坐标向量) and c is a vector of coefficients(系数向量). For example, points lying on the circle
\[ (x-c_1)^2 + (y-c_2)^2 = c_3^2 \]
can be detected by using the basic approach just discussed. The difference is
the presence of three parameters \((c_1,c_2,c_3)\), which results in a 3-D parameter
space with cube-like cells and accumulators of the form \(A(i,j,k)\). The
procedure is to increment \(c_1\) and \(c_2\) solve for \(c_3\) the that satisfies the equation above and update the accumulator cell associated with the triplet \((c_1,c_2,c_3)\)
10.3 Thresholding 阈值处理
10.3.3 Optimum Global Thresholding Using Otsu's Method 用OStu方法的最佳全局阈值处理
The approach discussed in this section, called Otsu’s method(大津阈值分割法) (Otsu [1979]), is an attractive alternative.The method is optimum in the sense that it maximizes
the between-class variance(最大化类间方差), a well-known measure used in statistical discriminant analysis. In addition to its optimality, Otsu’s method has the important property that it is based entirely on computations performed on the histogram of an image, an easily obtainable 1-D array.- 具体算法
设原始灰度图像灰度级为L,灰度级为i的像素点数为\(n_i\),则图像的全部像素数为
\[ N = n\_0 + n\_1 +...+ n\_{L-1} \]归一化直方图,则
\[ p\_i = n\_i / N , \sum\_{i=0}^{L-1}p\_i = 1 \]按灰度级用阈值t划分为两类:\(C_0 = (0,1,...t)\) 和 \(C_1 = (t+1,t+2,...,L-1)\),因此,\(C_0\)和\(C_1\)类的出现概率及均值分别由下列各式给出
\[ w_0 = P_r(C_0) = \sum_{i=0}^tp_i = w(t) \quad w_1 = P_r(C_1) = \sum_{i=t+1}^{L-1}p_i = 1-w(t) \] \[ \mu_0 = \sum_{i=0}^{t}ip_i/w_0 = \mu(t)/w(t) \quad \mu_1 = \sum_{i=t+1}^{L-1}ip_i/w_1 = \frac{\mu_T(t) - \mu(t)}{1-w(t)} \] \[ \mu(t) = \sum_{i=0}^{t}ip_i \quad\quad \mu_T = \mu(L-1) = \sum_{i=0}^{L-1}ip_i \]可以看出,对任何t值下式都能成立:
\[ w_0\mu_0 + w_1\mu_1 = \mu_T \quad w_0 + w_1 = 1\]C_0和C_1类的方差可由下式求得:
\[ \sigma_0^2 = \sum_{i=0}^{t}(i-\mu_0)^2p_i/w_0 \] \[ \sigma_1^2 = \sum_{i=t+1}^{L-1}(i-mu_1)^2p_i/w_1 \]- 定义类内方差为:
\[ \sigma_w^2 = w_0\sigma_0^2 + w_1\sigma_1^2 \] - 类间方差为:
\[ \sigma_B^2 = w_0(\mu_0-\mu_T)^2 + w_1(\mu_1-\mu_T)^2 = w_0w_1(\mu_1-\mu_0)^2 \] 总体方差为:
\[ \sigma_T^2 = \sigma_B^2 + \sigma_w^2 \]
10.3.7 Variable Thresholding 可变阈值处理
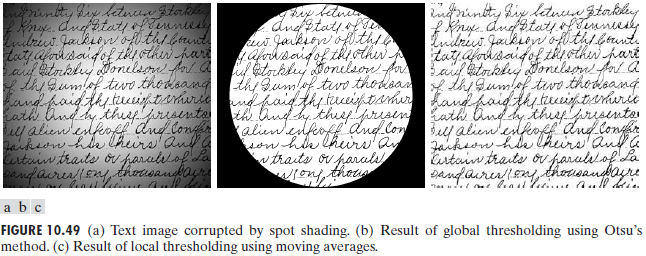
Using moving averages 使用移动平均
当需要处理的图像有非均匀分布的背景时,可以采用该方法
- Example
Interacitve Image Segmentation 交互式图像分割
- Step1-Feature Distribution Estimation
- Estimate the color distribution on scribbles
- Each pixel is assigned a probability to belong to F or B
- Step2-Weighted Distance Transform
- Weighted Geodesic Distance
- Computed in linear time
- Pixels are classified by comparing \(D_F(x)\) and \(D_B(x)\)
- Step3-Refine
- Automatically create a narrow band and new scribbles
- Band boundaries serve as "new scribbles"
Graph Cuts 图形分割技术 -Boykov and Jolly(2001)
- 详细内容参见该论文
Mumford-Shah Image Segmentation
Active Contours ("Snakes") 主动轮廓技术
- 可参考ipol.im网站上的算法:Chan-Vese Segmentation
Demo - Otsu's Segmentation
```matlab
I = imread('coins.png');用大津阈值法计算最佳阈值
level = graythresh(I);
用该阈值对图像进行分割
BW = im2bw(I,level);
展示图像与直方图
figure,imshow(I),figure,imshow(BW),figure,imhist(I)
```
【Duke-Image】Week_5 Segmentation的更多相关文章
- 【背景建模】PBAS
Pixel-Based Adaptive Segmenter(PBAS)检测算法,是基于像素的无参数模型,该算法结合了SACON和VIBE两个算法的优势,并在这两个算法的基础上改进而来,SACON和V ...
- zz【清华NLP】图神经网络GNN论文分门别类,16大应用200+篇论文最新推荐
[清华NLP]图神经网络GNN论文分门别类,16大应用200+篇论文最新推荐 图神经网络研究成为当前深度学习领域的热点.最近,清华大学NLP课题组Jie Zhou, Ganqu Cui, Zhengy ...
- 图学习【参考资料2】-知识补充与node2vec代码注解
本项目参考: https://aistudio.baidu.com/aistudio/projectdetail/5012408?contributionType=1 *一.正题篇:DeepWalk. ...
- 【AR实验室】mulberryAR : ORBSLAM2+VVSION
本文转载请注明出处 —— polobymulberry-博客园 0x00 - 前言 mulberryAR是我业余时间弄的一个AR引擎,目前主要支持单目视觉SLAM+3D渲染,并且支持iOS端,但是该引 ...
- 【.net 深呼吸】细说CodeDom(1):结构大观
CodeDom 是啥东东?Html Dom听过吧,XML Dom听过吧.DOM一般可翻译为 文档对象模型,那 Code + DOM呢,自然是指代码文档模型了.如果你从来没接触过 CodeDom,你大概 ...
- 【Machine Learning】KNN算法虹膜图片识别
K-近邻算法虹膜图片识别实战 作者:白宁超 2017年1月3日18:26:33 摘要:随着机器学习和深度学习的热潮,各种图书层出不穷.然而多数是基础理论知识介绍,缺乏实现的深入理解.本系列文章是作者结 ...
- 【前端性能】高性能滚动 scroll 及页面渲染优化
最近在研究页面渲染及web动画的性能问题,以及拜读<CSS SECRET>(CSS揭秘)这本大作. 本文主要想谈谈页面优化之滚动优化. 主要内容包括了为何需要优化滚动事件,滚动与页面渲染的 ...
- 【深入浅出jQuery】源码浅析--整体架构
最近一直在研读 jQuery 源码,初看源码一头雾水毫无头绪,真正静下心来细看写的真是精妙,让你感叹代码之美. 其结构明晰,高内聚.低耦合,兼具优秀的性能与便利的扩展性,在浏览器的兼容性(功能缺陷.渐 ...
- 【.net 深呼吸】程序集的热更新
当一个程序集被加载使用的时候,出于数据的完整性和安全性考虑,程序集文件(在99.9998%的情况下是.dll文件)会被锁定,如果此时你想更新程序集(实际上是替换dll文件),是不可以操作的,这时你得把 ...
随机推荐
- PowerShell Start 1 - 使用Get - Help.
详细帮助命令参见:https://msdn.microsoft.com/zh-cn/powershell/scripting/getting-started/fundamental/getting-d ...
- Android数字签名
描述你对Android数字签名的理解? 数字签名就是为程序打上一个标记来作为自己的标识,是Android系统要求的,若一个Android程序没有经过数字签名,没办法安装到系统: 签名也是对apk的一种 ...
- 【转】破解Source Insight 3.5.0072过程 附:安装软件+注册机
转载地址:http://blog.csdn.net/qs_hud/article/details/8884867 注册机及软件下载地址:http://download.csdn.net/detail/ ...
- unity3d随机地牢生成代码
现在也是处于失业状态,碰巧看到个面试题是要用unity生成个随机地牢,就把做题过程中的思路和代码记录一下吧. 做完了以后我又想了一下,发现其实根本不需要这么麻烦,果然demo里的代码对我的思路影响还是 ...
- Milliard Vasya's Function-Ural1353动态规划
Time limit: 1.0 second Memory limit: 64 MB Vasya is the beginning mathematician. He decided to make ...
- 使用AFNetWorking 实现以Basic Authentication方式获取access-token
由于服务器端对于调用API获取数据接口进行了限制,需要在调用API之前获取一个access-token,所以需要在iOS里实现获取这个access-token的功能. 服务器端是在ASP.NET中基于 ...
- T-SQL语句简易入门(第一课)
在微软官方,有一篇介绍T-SQL语句的教程,非常好理解,完全可以帮助新手入门,了解常用SQL语句的使用语法,而且又不涉及较为复杂的操作.不用安装示例数据库AdventureWorks.下面是教程里内容 ...
- centos6安装python3.4和pip3
在安装了epel源的情况下,直接yum就可以安装python3.4 yum install python34 -ypython3 --version 没有自带pip3,从官网安装 wget --no- ...
- C# WebService服务Post提交
public string WebServerTest(string PostData) { PostData = "jsonData=" + PostData; string P ...
- php : 基础(3)
运算符 算术运算符 基础: 符号有:+ - * / % 说明: 他们都是针对数字进行的运算: 如果他们的两边有不是数字的数据,就会(自动)转换为数字: 其中取余运算(取模运算)%,它只 ...