令状态寄存器访问指令(MRS,MSR)
ARM中有两条指令用于在状态寄存器和通用寄存器之间传送数据。
针对32位的ARM处理器,状态寄存器就是一个32位长的寄存器。每个位的含义如下图:
分成了4部分:
1,条件标志位
N(Negative), Z(Zero), C(Carry), V(Verflow)统称为条件标志位。ARM指令可以根据CPSR中的这些条件标志位来选择性的执行。
2,Q标志位
ARM v5的E系列处理器中,CPSR的bit[27]称为Q标志位。主要用于指示增强的DSP指令是否发生了溢出。
3,控制位
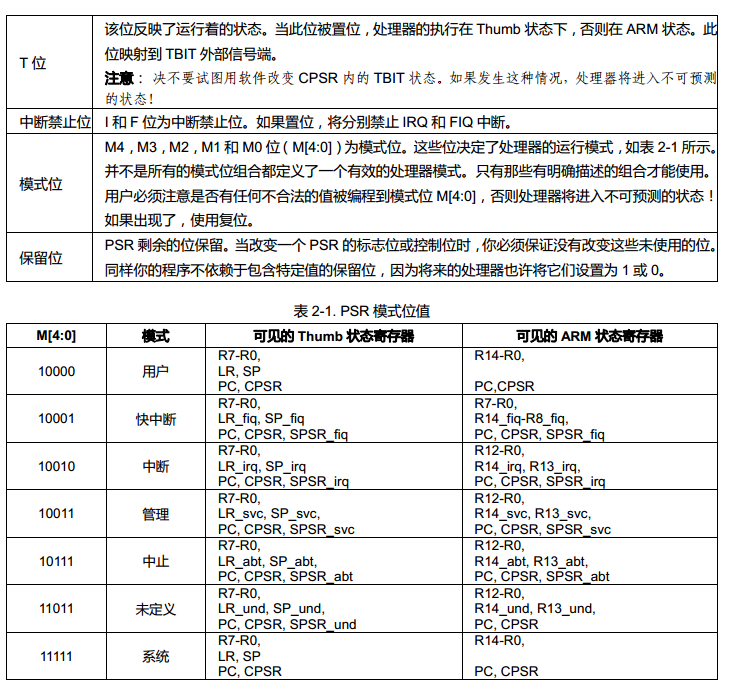
I, F, T以及M[4:0]统称为控制位。当异常中断发生时,这些位发生变化。在特权级的处理器模式下,软件可以修改这些控制位。
下表示控制位M[4:0]的含义:
| M[4:0] |
处理器模式 |
可访问的寄存器 |
|
0b10000 |
用户模式 |
PC,CPSR, R14~R0 |
|
0b10001 |
FIQ模式 |
PC,CPSR, SPSR_fiq,R14_fiq,R8_fiq, R7~R0 |
|
0b10010 |
IRQ模式 |
PC,CPSR, SPSR_irq,R14_irq,R13_irq,R12~R0 |
|
0b10011 |
管理模式 |
PC,CPSR, SPSR_svc,R14_svc,R13_svc,R12~R0 |
|
0b10111 |
中止模式 |
PC,CPSR, SPSR_abt,R14_abt,R13_abt, R12~R0 |
|
0b11011 |
未定义模式 |
PC,CPSR, SPSR_und,R14_und,R13_und, R12~R0 |
|
0b11111 |
系统模式 |
PC,CPSR(ARMv4及以上版本), R14~R0 |
4,保留位
用于将来ARM版本的扩展。
状态寄存器访问指令仅有两天:
MRS: 状态寄存器到通用寄存器的传送指令。
MSR: 通用寄存器到状态寄存器的传送指令。
MRS指令介绍
MRS的指令编码格式:

指令的语法格式:
MRS{<cond>}<Rd>, CPSR
MRS{<cond>}<Rd>, SPSR
其中:
<cond>为指令执行的条件码。当<cond>忽略时指令为无条件执行。
<Rd>为目标寄存器。
指令操作的伪代码:
- if ConditionPassed(cond) then
- if R == 1 then
- Rd = SPSR
- else
- Rd = CPSR
MSR指令使用的场合:
- 通常通过“读取-修改-写回”操作序列修改状态寄存器的内容。MRS指令用于将状态寄存器的内容读到通用寄存器中。
- 当异常允许嵌套时,需要在进入异常中断之后,嵌套中断发生之前保存当前处理器模式对应的SPSR。这时需要先通过MRS指令读出SPSR的值,在用其他指令将SPSR值保存起来。
- 在进程切换时也需要保存当前状态寄存器的值。
MSR指令介绍
MRS的指令编码格式:
这里分为两种格式,一种是原操作数为通用寄存器, 另一种是源操作数是立即数。

指令的语法格式:
- MSR{<cond>} CPSR_<fields>, #<immediate>
- MSR{<cond>} CPSR_<fields>, <Rm>
- MSR{<cond>} CPSR_<fields>, #<immediate>
- MSR{<cond>} CPSR_<fields>, <Rm>
其中:
<cond>为指令执行的条件码。当<cond>忽略时指令为无条件执行。
<fields>设置状态寄存器中需要操作的位。状态寄存器的32位可以分为4个8位的域:
f: 指示bits[31 : 24],又名条件标志位域
s: 指示bits[23 : 16],又名状态标志位域
x: 指示bits[15 : 8], 又名扩展位域
c: 指示bits[7 : 0],又名控制位
<immediate>为将要传送到状态寄存器中的立即数,该立即数的计算方式可以去照看<ARM+Architecture+Reference+Manual.pdf>
<Rm>寄存器包含将要传送到状态寄存器中的数据。
指令的操作伪代码:

指令的使用:
MSR指令通常用于恢复状态寄存器的内容或者改变寄存器的内容。
当退出异常中断处理器程序时,如果事先保存了状态寄存器的内容通常通过MSR指令将事先保存的状态寄存器内容恢复到状态寄存器中。
当需要修改状态寄存器的内容时,通过“读取-修改-写回”指令序列完成。写回操作也是通过MSR指令完成的。
处理器切换到特权模式,使用将要修改某个位域的示例:
- mrs r0, cpsr ;读取cpsr中的值
- bic r0, r0, #0x1F ;修改,去除当前处理器模式
- orr r0, r0, #0x13 ;修改,设置特权模式
- msr cpsr_c, r0 ;写回,仅仅修改CPRS中的控制位
- 1.MSR和MRS指令介绍
MRS 指令: 对状态寄存器CPSR和SPSR进行读操作。通过读CPSR可以获得当前处理器的工作状态。读SPSR寄存器可以获得进入异常前的处理器状态(因为只有异常模式下有SPSR寄存器)。
MSR指令: 对状态寄存器CPSR和SPSR进行写操作。与MRS配合使用,可以实现对CPSR或SPSR寄存器的读-修改-写操作,可以切换处理器模式、或者允许/禁止IRQ/FIQ中断等。
2.CPSR 程序状态寄存器(current program status register)
如图所示,ARM每种工作模式除R0~R15共16个寄存器外,还有第17个寄存器CPSR,叫做 当前程序状态寄存器
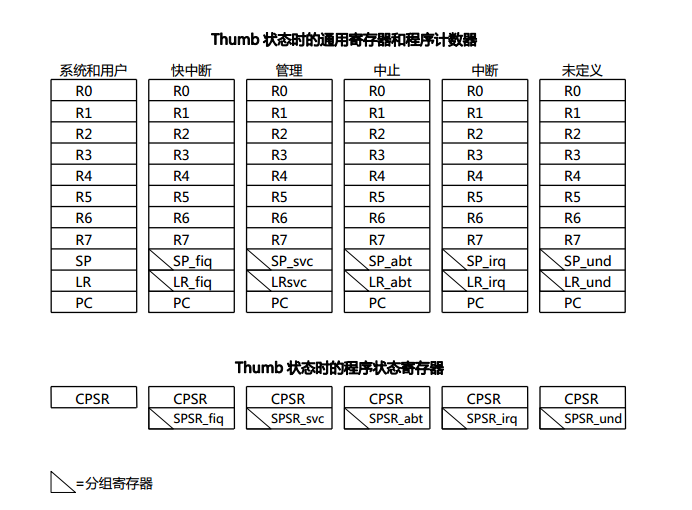
CPSR寄存器格式:
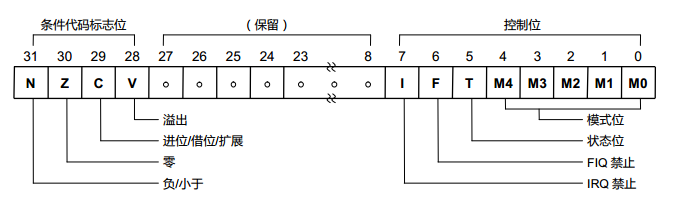
在CPSR寄存器中主要用到了控制位,每个标志位如下图所示:
3.使用MSR指令写入数据
例:
msr cpsr_c, #0xd2 @0xd2=1100 0010//禁止中断使能,进入中断模式 msr cpsr_c, #0x53 @0x53=0101 0011//开IRQ中断,禁止FIQ中断,进入ARM状态,设为管理(svc32)模式
其中cpsr_c是因为CPSR有4个8位区域:
- C 控制域屏蔽字节([7:0])
- X 扩展域屏蔽字节([15:8])
- S 状态域屏蔽字节([23:16])
- F 标志域屏蔽字节([31:24])
所以cpsr_c表示的是CPSR控制位、
4.使用MRS和MSR来设置2440位管理模式,实例:
mrs r0,cpsr //读状态寄存器cpsr的数据到r0中 bic r0,r0,#0x1f //对r0低5位进行清0,清除模式位
orr r0,r0,#0xd3 //低8位或(110 10011), 设为管理(svc32)模式,禁止IRQ和FIQ中断
msr cpsr,r0 //写入状态寄存器cpsr,更新。5.SPSR程序保存状态寄存器(saved program status register)
SPSR用于保存CPSR的状态,以便异常返回后恢复异常发生时的工作状态。当特定的异常中断发生时,这个寄存器用于存放当前程序状态寄存器的内容。在异常中断退出时,可以用SPSR来恢复CPSR。
(注意:用户user模式和系统system模式不是异常中断模式,所以他没有SPSR。当用户在用户模式或系统模式访问SPSR,将产生不可预知的后果。)
在异常模式返回时,如果指令带有S后缀(除了比较指令以外),同时又以PC为目标寄存器进行操作,则操作的同时从SPSR恢复CPSR。以下都是可以恢复CPSR寄存器
令状态寄存器访问指令(MRS,MSR)的更多相关文章
- ARM学习笔记6——程序状态寄存器访问指令
这两条指令结合,可用于对CPSR或SPSR进行读/写操作. 当需要保存或修改当前模式下CPSR或SPSR的内容时,首先必须将这些内容传递到通用寄存器中 1.MRS指令(Move to Register ...
- 汇编指令-MRS(读)和MSR(写)指令操作CPSR寄存器和SPSR寄存器使用(1)
1.MSR和MRS指令介绍 MRS 指令: 对状态寄存器CPSR和SPSR进行读操作.通过读CPSR可以获得当前处理器的工作状态.读SPSR寄存器可以获得进入异常前的处理器状态(因为只有异常模式下有 ...
- 【嵌入式开发】 ARM 汇编 (指令分类 | 伪指令 | 协处理器访问指令)
作者 : 韩曙亮 博客地址 : http://blog.csdn.net/shulianghan/article/details/42408137 转载请著名出处 本博客相关文档下载 : -- AR ...
- (六)ARM状态寄存器-PSR
ARM程序状态寄存器Program State Register 在ARM模式中, 有16个数据寄存器和1或2个状态寄存器是可以随时访问的.在特权模式 (privileged mode) 下, 对应的 ...
- PIC单片机状态寄存器中的C(进位/借位位标志)
查阅PIC单片机芯片手册,关于进位/借位位的说明为: C:进位/借位位. 1 = 结果的最高位发生了进位 0 = 结果的最高位未发生进位 同时有一条标注:借位的极性是相反的. 通过以上说明,可以将C的 ...
- 系统架构师考试——程序计数器 PC, 指令寄存器IR、状态寄存器SR、通用寄存器GR
● 计算机执行程序时,在一个指令周期的过程中,为了能够从内存中读指令操作码,首先是将__(9)___的内容送到地址总线上. (9)A.程序计数器PC B.指令寄存器IR C.状态寄存器SR ...
- C8051F340 USB0 寄存器访问
/*************************************************************************** * C8051F340 USB0 寄存器访问 ...
- [转]ARM平台下独占访问指令LDREX和STREX
参考:ARM平台下独占访问指令LDREX和STREX的原理与使用详解 全文转载如下: 为了实现线程间同步,一般都要在执行关键代码段之前加互斥(Mutex)锁,且在执行完关键代码段之后解锁.为了实现所谓 ...
- ARM伪指令和协处理器访问指令
伪指令本身没有对应的机器码 .global声明全局符号,点事GUN汇编的特点 .data定义数据段 .equ DA #0x89 定义宏 .align 4 4字节对齐 mov 指令里的立即数只能是8位的 ...
随机推荐
- 原生CSS动画回调事件
原文链接: Detecting CSS Animation Completion with JavaScript 原文日期: 2014年02月20日 翻译日期: 2014年02月21日 翻译人员: 铁 ...
- 不用局部变量实现C语言两数交换算法
关于交换算法,我想非常简单,所以,这次不做分析,直接上代码: #include <stdio.h> #include <stdlib.h> //用异或方式实现 void swa ...
- PS 滤镜——极坐标变换到平面坐标
%%% 极坐标到平面坐标 clc; clear all; close all; addpath('E:\PhotoShop Algortihm\Image Processing\PS Algorith ...
- 学习Qt,Getting started
在界面的设计中,现在用的比较多的是Qt和WPF(C#),以前的MFC已出现衰老趋势.本人最近在学习Qt,觉得很有用,遂决定将学习历程记录下来,或许有感于后之来者,不亦乐哉. 一.Hello Qt #i ...
- linux下64位汇编的系统调用(1)
现在基本上系统都是64位了,而64位系统下的汇编和32位有了较大的变化,无论是系统调用的接口还是C标准库的接口都和32位汇编有所不同:下面简单谈一下在64位linux下如何利用汇编直接调用系统调用. ...
- RHEL6 不重启扫描新添加硬盘
First find your host bus number grep mpt /sys/class/scsi_host/host?/proc_name Which should return a ...
- Java IO学习--(一)概述
在这一小节,我会试着给出Java IO(java.io)包下所有类的概述.更具体地说,我会根据类的用途对类进行分组.这个分组将会使你在未来的工作中,进行类的用途判定时,或者是为某个特定用途选择类时变得 ...
- 初步认识thymeleaf:简单表达式和标签(一)
初步认识Thymeleaf:简单表达式和标签.(一) 本文只适用于不会Java对HTML语言有基础的程序员们,是浏览了各大博客后收集整理,重新编辑的一篇文章,希望能对大家有所帮助.最后本文如果有哪 ...
- 4 sum
Given an array S of n integers, are there elements a, b, c, and d in S such that a + b + c + d = tar ...
- 《深入理解java虚拟机》读书笔记1--java内存区域
Java内存管理 本文主要介绍Java虚拟机运行时的内存区域是如何划分的.Java对象的创建过程.Java对象的内存布局.Java对象的访问定位 一:运行时区域划分 主要可以分为以下 几个: 程序计数 ...