ORCA避障源码笔记
参考资料
https://gamma.cs.unc.edu/ORCA/publications/ORCA.pdf
https://gamma.cs.unc.edu/RVO2/
数学知识
1.向量的点乘 dotProduct,计算方法:1. 2.
2. ,
,
作用:点积如果为负,则a,b形成的角为钝角;如果为零,那么a,b垂直;如果为正,那么a,b形成的角为锐角
2.向量a,向量b,det(a,b)表示行列式的值,计算方法x1y2 - x2y1,同时也是叉乘的值
作用:1.以两个向量为邻边的平行四边形的有向面积,2.小于0表示b在a的顺时针方向,大于0表示b在a逆时针方向,等于0表示a,b平行
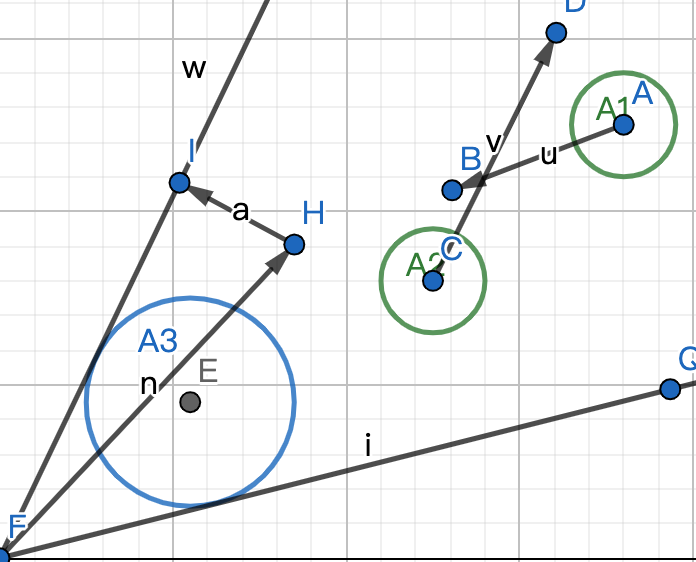
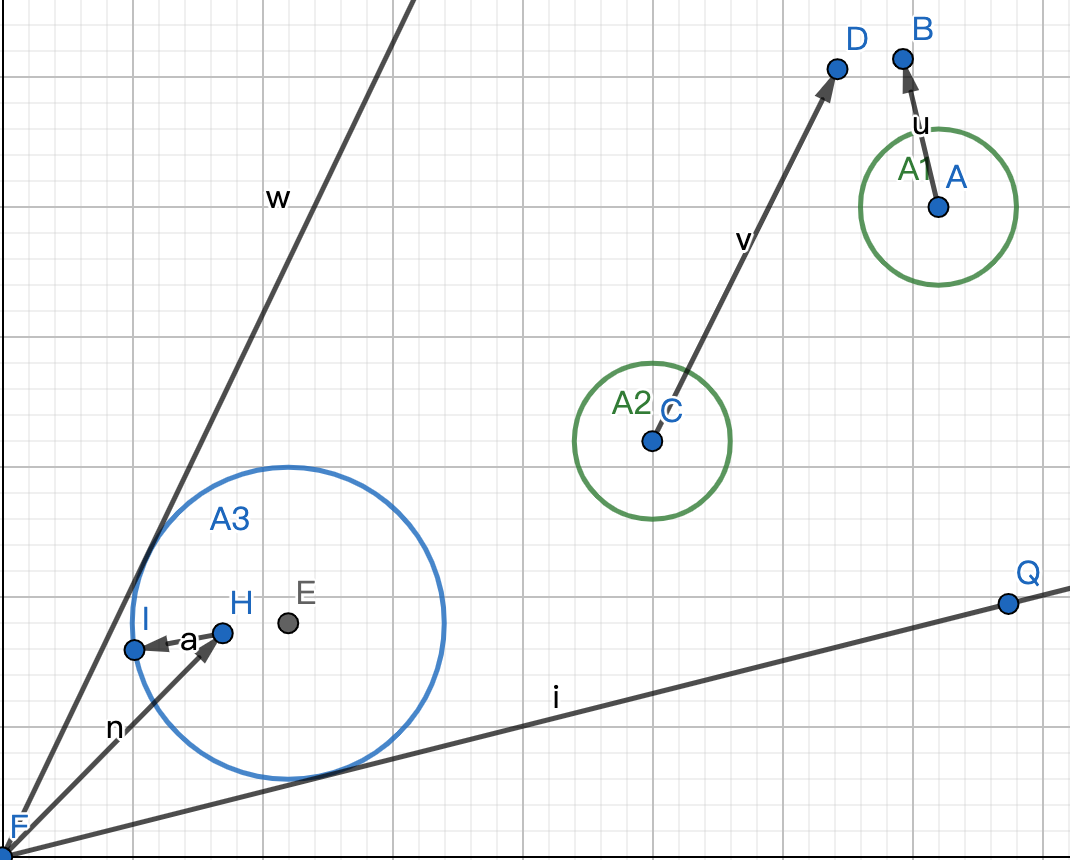
下图是碰撞需要修正,并且保证最短修正的两种情况,
1) 将速度修正到切线上
2) 将速度修正到圆
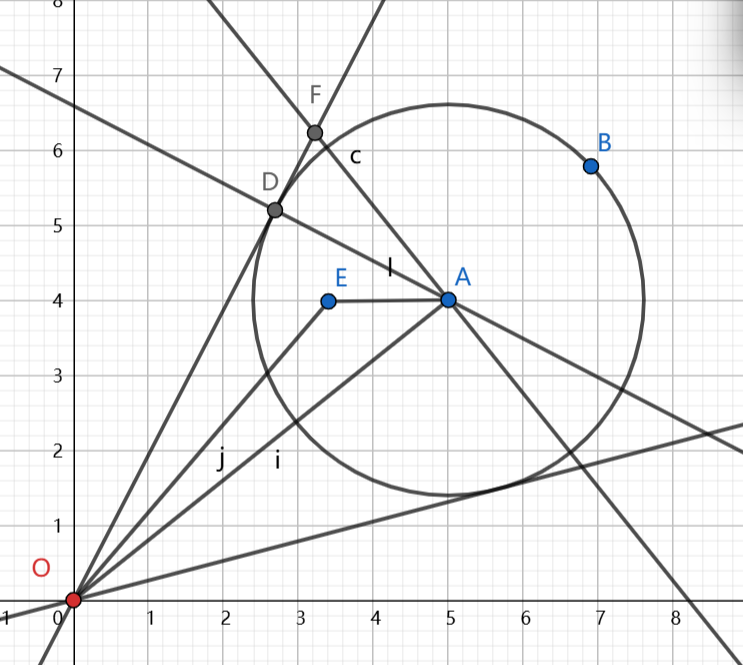
1,
final double dotProduct1 = w.dotProduct(relativePosition);
dotProduct1 < 0.0 && dotProduct1 * dotProduct1 > combinedRadiusSq * wLengthSq
这个代码是为了判断当前是哪种情况,
向量w = 相对速度 - 相对位置
dotProduct1小于0,表示向量w与相对位置的夹角为钝角,即AE与AO的角为锐角(需要先判断这个,只有锐角范围内cos单调递减)
dotProduct1 * dotProduct1 > combinedRadiusSq * wLengthSq,角OAE小于角OAD
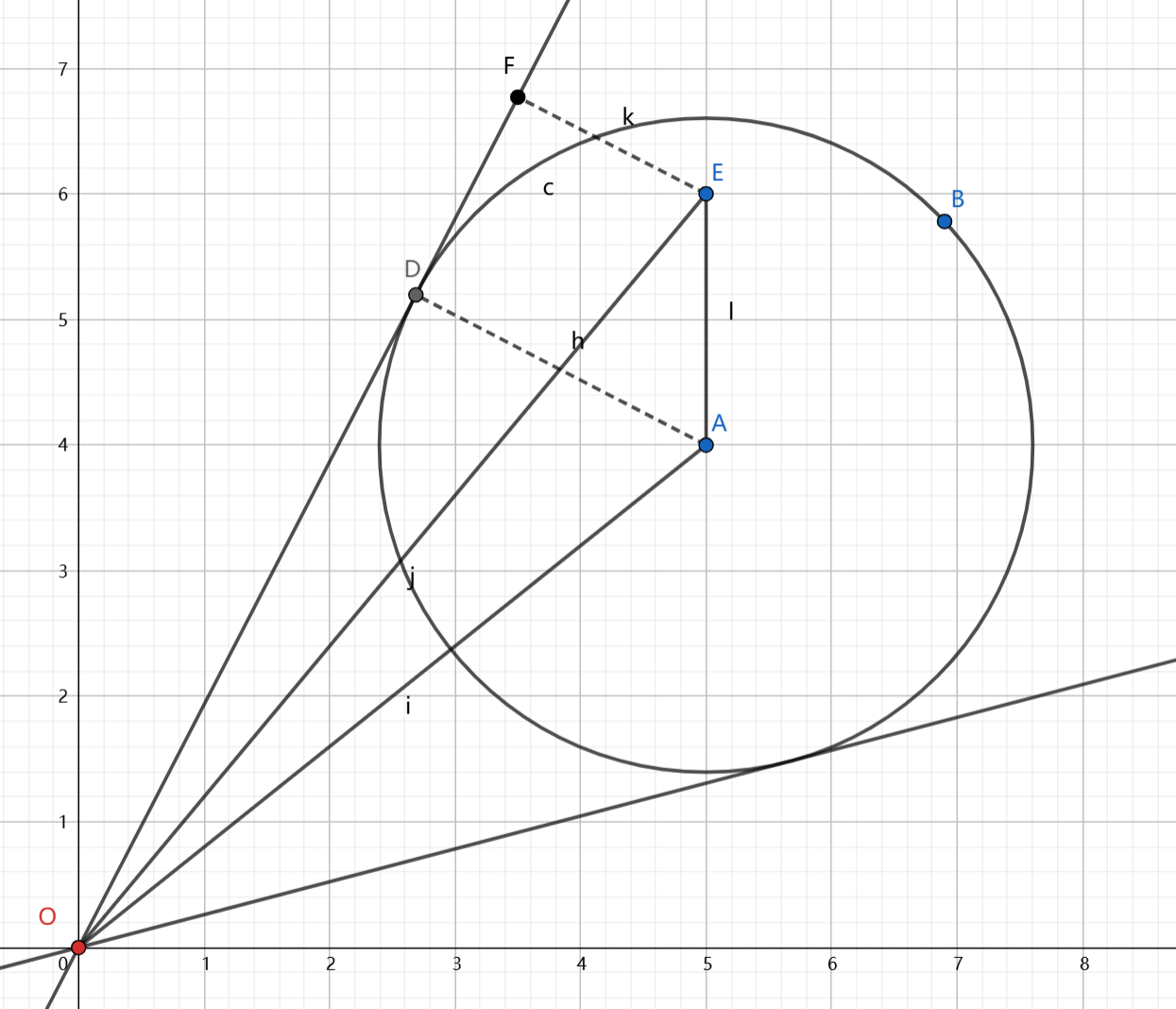
推导:
cos在0-90单调递减
角OAE < 角OAD
=> cosOAE > cosOAD
=> OA*cosOAE > OA*cosOAD (同时乘以OA)
=> OA*cosOAE > AD (OA*cosOAD = AD)
=> OA * AE * cosOAE > AE * AD (同时乘以AE)
=> dotProduct1 * dotProduct1 > combinedRadiusSq * wLengthSq
2
direction = new Vector2D(relativePosition.getX() * leg - relativePosition.getY() * combinedRadius, relativePosition.getX() * combinedRadius + relativePosition.getY() * leg)
这段代码为了计算第一情况,修正速度的落点,
leg为OD的长度,假设direction为line的方向,即向量OD的单位向量DIR(a, b)顺时针的单位向量DIE (b, -a),A的坐标(x, y)
向量OA 点乘 向量DIR = 向量OA的长度 * 1 * cosAOD
=> x*a + y*b = leg
向量OA 点乘 向量DIE = 向量OA的长度 * 1 * cosOAD
=>x*b - y*a = combinedRadius
结合这两个式子就可以解a,b,
RVOMath.det(relativePosition, w) > 0.0
这个在判断修正方向是在相对位置的左边还是右边
3
速度的可选区域为line方向的左侧, linearProgram2 找到可行域的交集,即line的交集
3.1
RVOMath.det(lines.get(lineNo).direction, lines.get(lineNo).point.subtract(newVelocity)) > 0.0
大于0说明newVelocity在line的右侧,不在line的可行域内,需要重新计算速度
3.2
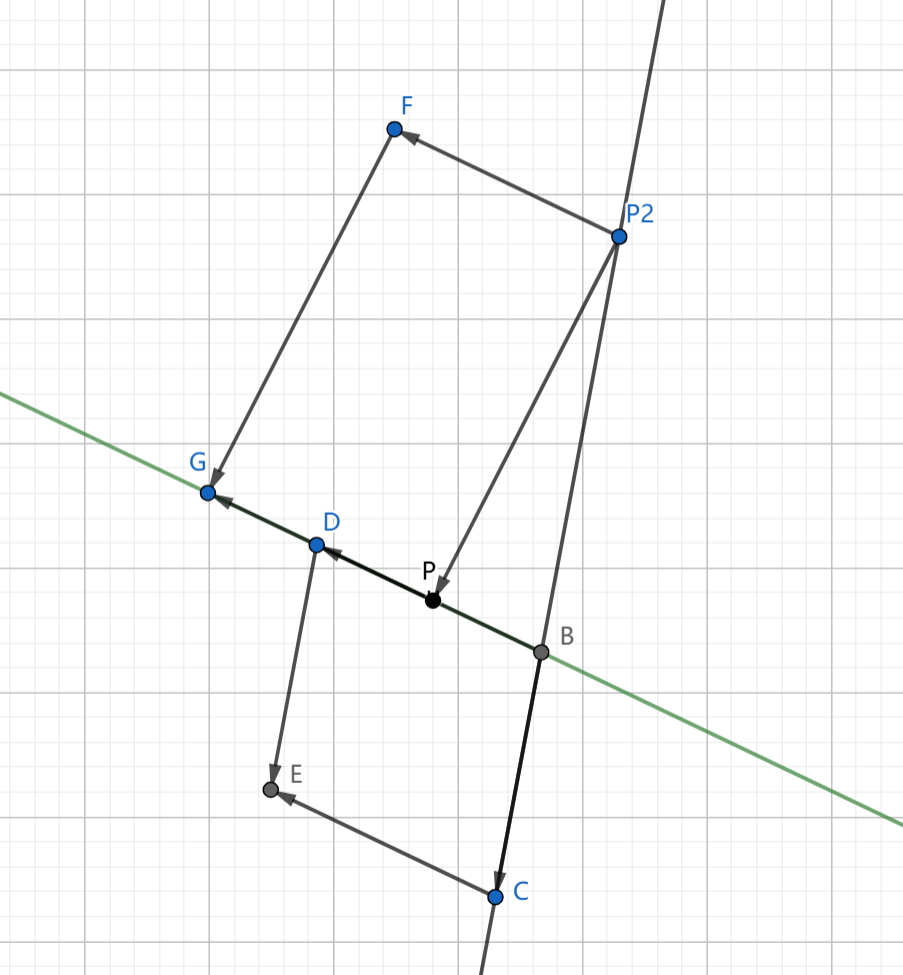
如图,绿色为line i, 黑色为line no
final double denominator = RVOMath.det(lines.get(lineNo).direction, lines.get(i).direction);
final double numerator = RVOMath.det(lines.get(i).direction, lines.get(lineNo).point.subtract(lines.get(i).point));
final double t = numerator / denominator;
denominator为BCED的面积 = 2个DBC的面积 = 2 * 1/2 * BP2 * 高
numerator为PGFP2的面积 = 2个GPP2 的面积 = 2个DBP2的面积 = 2 * 1/2 * BC * 高
t = numerator / denominator = BP2 / BC = BP2
t 为line i 和 line no 的交点 到 line point 的距离
4
linearProgram3
如果找不到line的交集,则执行linearProgram3,从上次失败的line开始往后遍历
将line i 之前的line做一个修正,修正的方法是:(1)将point修正到交点,(2)将方向修正到角平分线,靠近i的方向
RVOMath.det(lines.get(i).direction, lines.get(i).point.subtract(newVelocity)) > distance
这段代码用来判断是否需要修正速度,如果修正后的速度与当前line的距离大于前一个line的距离大,那么需要修正。
因为修正后速度将在角平分线上,一定距离当前line更近
ORCA避障源码笔记的更多相关文章
- Zepto源码笔记(一)
最近在研究Zepto的源码,这是第一篇分析,欢迎大家继续关注,第一次写源码笔记,希望大家多指点指点,第一篇文章由于首次分析原因不会有太多干货,希望后面的文章能成为各位大大心目中的干货. Zepto是一 ...
- redis源码笔记(一) —— 从redis的启动到command的分发
本作品采用知识共享署名 4.0 国际许可协议进行许可.转载联系作者并保留声明头部与原文链接https://luzeshu.com/blog/redis1 本博客同步在http://www.cnblog ...
- AsyncTask源码笔记
AsyncTask源码笔记 AsyncTask在注释中建议只用来做短时间的异步操作,也就是只有几秒的操作:如果是长时间的操作,建议还是使用java.util.concurrent包中的工具类,例如Ex ...
- Java Arrays 源码 笔记
Arrays.java是Java中用来操作数组的类.使用这个工具类可以减少平常很多的工作量.了解其实现,可以避免一些错误的用法. 它提供的操作包括: 排序 sort 查找 binarySearch() ...
- Tomcat8源码笔记(八)明白Tomcat怎么部署webapps下项目
以前没想过这么个问题:Tomcat怎么处理webapps下项目,并且我访问浏览器ip: port/项目名/请求路径,以SSM为例,Tomcat怎么就能将请求找到项目呢,项目还是个文件夹类型的? Tom ...
- Tomcat8源码笔记(七)组件启动Server Service Engine Host启动
一.Tomcat启动的入口 Tomcat初始化简单流程前面博客介绍了一遍,组件除了StandardHost都有博客,欢迎大家指文中错误.Tomcat启动类是Bootstrap,而启动容器启动入口位于 ...
- Tomcat8源码笔记(六)连接器Connector分析
根据 Tomcat8源码笔记(五)组件Container分析 前文分析,StandardService的初始化重心由 StandardEngine转移到了Connector的初始化,本篇记录下Conn ...
- Tomcat8源码笔记(五)组件Container分析
Tomcat8源码笔记(四)Server和Service初始化 介绍过Tomcat中Service的初始化 最先初始化就是Container,而Container初始化过程是咋样的? 说到Contai ...
- Tomcat8源码笔记(四)Server和Service初始化
上一章 简单说明下Tomcat各个组件: Server:服务器,Tomcat服务器,一个Tomcat只有一个Server组件; Service:业务层,是Server下最大的子容器,一个Server可 ...
- Tomcat8源码笔记(三)Catalina加载过程
之前介绍过 Catalina加载过程是Bootstrap的load调用的 Tomcat8源码笔记(二)Bootstrap启动 按照Catalina的load过程,大致如下: 接下来一步步分析加载过程 ...
随机推荐
- Angular Material 18+ 高级教程 – CDK Layout の Breakpoints
前言 CDK Layout 主要是用于处理 Breakpoints,它底层是依靠 window.matchMedia 来实现的. Material Design 2 & 3 Breakpoin ...
- TypeScript – 冷知识
当 generic return 遇上 parameter 报错了.原因是 querySelector 默认返回类型是抽象的 Element. 而 method 参数要求的是具体的 InputElem ...
- RxJS 系列 – Subject
前言 RxJS 两大概念 Observable 和 Subject. 上一篇介绍了 Observable 这篇继续接受 Subject. 参考 RxJS 建立 Observable 的基礎 - Obs ...
- DOM – Browser Reflow & Repaint
前言 没有深入研究过, 懂个概念就好, 等性能遇到问题在来看看. 以前写的笔记: 游览器 reflow 参考: reflow和repaint引发的性能问题 精读<web reflow> R ...
- GPUStack正式发布: 为大模型而生的开源GPU集群管理器
经过 Seal 研发团队几个月来持续的开发和测试,我们满怀期待及热情地发布新的产品 GPUStack,GPUStack 是一个用于运行 LLM(大型语言模型)的开源 GPU 集群管理器.尽管如今大语言 ...
- SpringMVC —— 响应
响应页面 响应文本数据 响应json数据 响应json集合数据 注解 转换json时使用了类型转换器
- 【赵渝强老师】MySQL的闪回
MySQL DBA或开发人员,有时会误删或者误更新数据,如果是线上环境并且影响较大,就需要能快速回滚.传统恢复方法是利用备份重搭实例,再应用去除错误sql后的binlog来恢复数据.此法费时费力,甚至 ...
- 【USB3.0协议学习】Topic1·USB3.0Hub的一些机制
一.USB3.0 Hub的单播(非广播)机制 Hub通过解析下行packet header中的Route String字段识别packet要传递的终点,其中4'b0000代表hub本身,4'b0001 ...
- Failed to mount component: template or render function not defined 使用 require 引入组件的时候报错
为什么有的时候使用require引入组件不会报错,有的时候就会报错,需要加上default就不会报错 ? webpack 支持 CommonJS和 ES6模块打包,当我们引用组件的时候,在 scri ...
- day13-JavaDoc
JavaDoc JavaDoc命令是用来生成自己API文档的 参数信息 @author 作者名 @version 版本号 @since 指明需要最早使用的jdk版本 @param 参数名 @retur ...