[MicroPython]TPYBoard智能小车“飞奔的TPYBoard装甲一号”
智能小车作为现代的新发明,是以后的发展方向,他可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等等的用途。智能小车能够实时显示时间、速度、里程,具有自动寻迹、寻光、避障功能,可程控行驶速度、准确定位停车,远程传输图像等功能。下面带大家做一个智能蓝牙小车,用手机APP来控制小车前进、后退、向左、向右、停止,本次蓝牙小车的设计在于探索蓝牙智能小车的设计理念及设计方法,学习一下PWM控制电机差速来控制小车的方向,下面就动手搞起来吧!!!!!
1.效果展示
给大家上视频连接,可以蓝牙控制,可以手柄控制哦
https://v.qq.com/x/page/k0721or47dw.html
2.材料准备
TPYBoard v102 1块
蓝牙串口模块 1个
TPYBoard v102小车扩展板(包含4个车轮,4个电机)
18650电池 2节
数据线 1条
杜邦线 若干
蓝牙APP (http://old.tpyboard.com/download/tool/190.html)
3.蓝牙模块
蓝牙( Bluetooth):是一种无线技术标准,可实现固定设备、移动设备和楼宇个人域网之间的短距离数据交换(使用2.4-2.485GHz的ISM波段的UHF无线电波)。
我们在此使用的蓝牙模块(HC-06)已经在内部实现了蓝牙协议,不用我们再去自己开发调试协议。这类模块一般都是借助于串口协议通信,因此我们只需借助串口将我们需要发送的数据发送给蓝牙模块,蓝牙模块会自动将数据通过蓝牙协议发送给配对好的蓝牙设备。

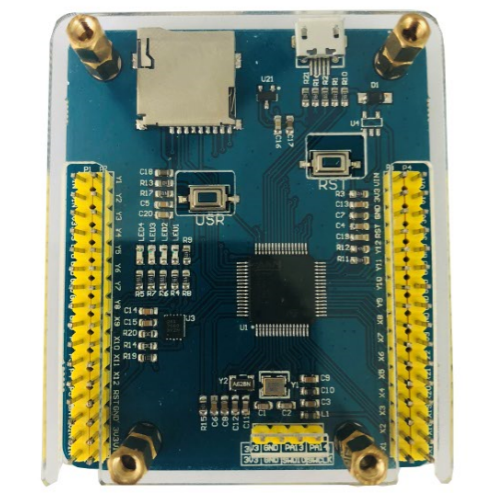
4.单片机-TPYBoard v102
TPYBoard v102 是遵循MIT协议,由TurnipSmart公司制作的一款MicroPython开发板,它基于STM32F405单片机,通过USB接口进行数据传输。该开发板内置4个LED灯、一个加速度传感器,可在3V-10V之间的电压正常工作。让你会Python就能做极客, 用Python控制硬件,支持Python语言的开发板。比树莓派更小巧,更简单,更便宜,比Arduino更强大,更加容易编程。
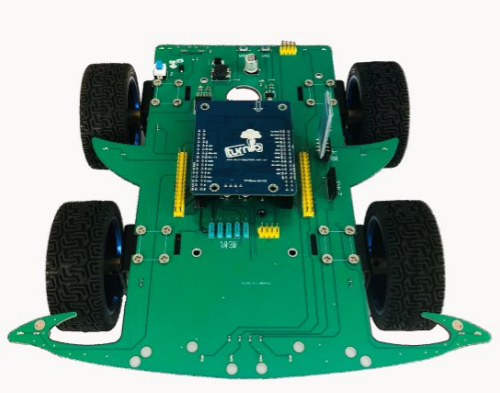
小车扩展板
以TPYBoard v102开发板为主控板,小车扩展板具有四路PWM调速电机、8个可控LED、1个蜂鸣器、5路舵机接口、1个蓝牙接口、1个PS2无线接口、引出TPYBoard v102开发板全部针脚,可装载循迹模块、超声波模块、机械手臂、红外接收头,兼容入门级电机和专业级电机,两节18650单独供电。
源代码
我们只需要把TPYBoard v102 插小车扩展板上,把蓝牙模块插上,把程序写入就行,下面是main.py源程序
# main.py -- put your code here!
from pyb import Pin
from pyb import UART N1 = Pin('Y1', Pin.OUT_PP)
N2 = Pin('Y2', Pin.OUT_PP)
N3 = Pin('Y3', Pin.OUT_PP)
N4 = Pin('Y4', Pin.OUT_PP)
N5 = Pin('Y6', Pin.OUT_PP)
N6 = Pin('Y7', Pin.OUT_PP)
N7 = Pin('Y8', Pin.OUT_PP)
N8 = Pin('Y9', Pin.OUT_PP) led_red=Pin('Y5', Pin.OUT_PP)
led_right=Pin('Y12', Pin.OUT_PP)
led_left=Pin('Y11', Pin.OUT_PP) led_red.value(1)
led_right.value(0)
led_left.value(0) blue=UART(1,9600,timeout=100) def go(speed):
M1_0=pyb.Timer(8, freq=10000).channel(1, pyb.Timer.PWM, pin=pyb.Pin.board.Y1, pulse_width=(speed*200)+10000)
M1_1=pyb.Timer(8, freq=10000).channel(2, pyb.Timer.PWM, pin=pyb.Pin.board.Y2, pulse_width=0) M2_0=pyb.Timer(4, freq=10000).channel(3, pyb.Timer.PWM, pin=pyb.Pin.board.Y3, pulse_width=(speed*100)+5000)
M2_1=pyb.Timer(4, freq=10000).channel(4, pyb.Timer.PWM, pin=pyb.Pin.board.Y4, pulse_width=0) M3_0=pyb.Timer(1, freq=10000).channel(1, pyb.Timer.PWM, pin=pyb.Pin.board.Y6, pulse_width=(speed*220)+10000)
M3_1=pyb.Timer(1, freq=10000).channel(2, pyb.Timer.PWM, pin=pyb.Pin.board.Y7, pulse_width=0) M4_0=pyb.Timer(2, freq=10000).channel(3, pyb.Timer.PWM, pin=pyb.Pin.board.Y9, pulse_width=(speed*50)+5000)
M4_1=pyb.Timer(12, freq=10000).channel(2, pyb.Timer.PWM, pin=pyb.Pin.board.Y8, pulse_width=0) led_red.value(0) def back(speed):
M1_0=pyb.Timer(8, freq=10000).channel(1, pyb.Timer.PWM, pin=pyb.Pin.board.Y1, pulse_width=0)
M1_1=pyb.Timer(8, freq=10000).channel(2, pyb.Timer.PWM, pin=pyb.Pin.board.Y2, pulse_width=(speed*200)+10000) M2_0=pyb.Timer(4, freq=10000).channel(3, pyb.Timer.PWM, pin=pyb.Pin.board.Y3, pulse_width=0)
M2_1=pyb.Timer(4, freq=10000).channel(4, pyb.Timer.PWM, pin=pyb.Pin.board.Y4, pulse_width=(speed*100)+10000) M3_0=pyb.Timer(1, freq=10000).channel(1, pyb.Timer.PWM, pin=pyb.Pin.board.Y6, pulse_width=0)
M3_1=pyb.Timer(1, freq=10000).channel(2, pyb.Timer.PWM, pin=pyb.Pin.board.Y7, pulse_width=(speed*200)+10000) M4_0=pyb.Timer(2, freq=10000).channel(3, pyb.Timer.PWM, pin=pyb.Pin.board.Y9, pulse_width=0)
M4_1=pyb.Timer(12, freq=10000).channel(2, pyb.Timer.PWM, pin=pyb.Pin.board.Y8, pulse_width=(speed*100)+10000) led_red.value(1) def stop():
M1_0=pyb.Timer(8, freq=10000).channel(1, pyb.Timer.PWM, pin=pyb.Pin.board.Y1, pulse_width=0)
M1_1=pyb.Timer(8, freq=10000).channel(2, pyb.Timer.PWM, pin=pyb.Pin.board.Y2, pulse_width=0) M2_0=pyb.Timer(4, freq=10000).channel(3, pyb.Timer.PWM, pin=pyb.Pin.board.Y3, pulse_width=0)
M2_1=pyb.Timer(4, freq=10000).channel(4, pyb.Timer.PWM, pin=pyb.Pin.board.Y4, pulse_width=0) M3_0=pyb.Timer(1, freq=10000).channel(1, pyb.Timer.PWM, pin=pyb.Pin.board.Y6, pulse_width=0)
M3_1=pyb.Timer(1, freq=10000).channel(2, pyb.Timer.PWM, pin=pyb.Pin.board.Y7, pulse_width=0) M4_0=pyb.Timer(12, freq=10000).channel(2, pyb.Timer.PWM, pin=pyb.Pin.board.Y8, pulse_width=0)
M4_1=pyb.Timer(2, freq=10000).channel(3, pyb.Timer.PWM, pin=pyb.Pin.board.Y9, pulse_width=0)
led_right.value(0)
led_left.value(0)
led_red.value(1) def left(speed):
M1_0=pyb.Timer(8, freq=10000).channel(1, pyb.Timer.PWM, pin=pyb.Pin.board.Y1, pulse_width=(speed*30)+10000)
M1_1=pyb.Timer(8, freq=10000).channel(2, pyb.Timer.PWM, pin=pyb.Pin.board.Y2, pulse_width=0) M2_0=pyb.Timer(4, freq=10000).channel(3, pyb.Timer.PWM, pin=pyb.Pin.board.Y3, pulse_width=(speed*100)+10000)
M2_1=pyb.Timer(4, freq=10000).channel(4, pyb.Timer.PWM, pin=pyb.Pin.board.Y4, pulse_width=0) M3_0=pyb.Timer(1, freq=10000).channel(1, pyb.Timer.PWM, pin=pyb.Pin.board.Y6, pulse_width=(speed*30)+10000)
M3_1=pyb.Timer(1, freq=10000).channel(2, pyb.Timer.PWM, pin=pyb.Pin.board.Y7, pulse_width=0) M4_0=pyb.Timer(2, freq=10000).channel(3, pyb.Timer.PWM, pin=pyb.Pin.board.Y9, pulse_width=(speed*100)+10000)
M4_1=pyb.Timer(12, freq=10000).channel(2, pyb.Timer.PWM, pin=pyb.Pin.board.Y8, pulse_width=0)
led_right.value(1)
led_left.value(0) def right(speed):
M1_0=pyb.Timer(8, freq=10000).channel(1, pyb.Timer.PWM, pin=pyb.Pin.board.Y1, pulse_width=(speed*200)+20000)
M1_1=pyb.Timer(8, freq=10000).channel(2, pyb.Timer.PWM, pin=pyb.Pin.board.Y2, pulse_width=0) M2_0=pyb.Timer(4, freq=10000).channel(3, pyb.Timer.PWM, pin=pyb.Pin.board.Y3, pulse_width=(speed*200)+3000)
M2_1=pyb.Timer(4, freq=10000).channel(4, pyb.Timer.PWM, pin=pyb.Pin.board.Y4, pulse_width=0) M3_0=pyb.Timer(1, freq=10000).channel(1, pyb.Timer.PWM, pin=pyb.Pin.board.Y6, pulse_width=(speed*100)+20000)
M3_1=pyb.Timer(1, freq=10000).channel(2, pyb.Timer.PWM, pin=pyb.Pin.board.Y7, pulse_width=0) M4_0=pyb.Timer(2, freq=10000).channel(3, pyb.Timer.PWM, pin=pyb.Pin.board.Y9, pulse_width=(speed*100)+3000)
M4_1=pyb.Timer(12, freq=10000).channel(2, pyb.Timer.PWM, pin=pyb.Pin.board.Y8, pulse_width=0)
led_right.value(0)
led_left.value(1) while True:
if blue.any()>0:
data=blue.read().decode()
print(data)
if data.find('')>-1:
#stop
stop()
print('stop')
if data.find('')>-1:
pyb.LED(2).on()
pyb.LED(3).off()
pyb.LED(4).off()
#-------------
go(5)
print('go')
if data.find('')>-1:
pyb.LED(2).off()
pyb.LED(3).on()
pyb.LED(4).off()
#-------------
back(5) if data.find('')>-1:
pyb.LED(2).off()
pyb.LED(3).off()
pyb.LED(4).on()
left(5)
if data.find('')>-1:
pyb.LED(2).off()
pyb.LED(3).off()
pyb.LED(4).on()
right(5)
[MicroPython]TPYBoard智能小车“飞奔的TPYBoard装甲一号”的更多相关文章
- Micropython教程之TPYBoardv102 DIY蓝牙智能小车实例
1.实验目的 1.学习在PC机系统中扩展简单I/O接口的方法. 2.进一步学习编制数据输出程序的设计方法. 3.学习蓝牙模块的接线方法及其工作原理. 4.学习L298N电机驱动板模块的接线方法. 5. ...
- Arduino智能小车制作报告
Arduino智能小车制作报告 制作成员:20135224陈实 20135208贺邦 20135207王国伊 前提: Arduino,是一个开源的单板机控制器,采用了基于开放源代码的软硬件平台,构 ...
- 20135223/20135234/20135229小组——亚博 Arduino智能小车实践报告
实验名称:Arduino智能小车组装和综合测试 实验小组成员:20135223何伟钦 20135234马启扬 20135229吕松鸿 实验日期:2015.10.27—2015.11.3 实验时长:24 ...
- Arduino智能小车实践学习报告
Arduino智能小车实践学习报告 参与人员: 20135316 王剑桥 20135312 吴汉彦 20135319 朱锂 一. 背景了解: 单片机:将中央处理单元CPU(进行运算.控制).随机存储器 ...
- 亚博 Arduino智能小车实验报告
亚博 Arduino智能小车实践报告 一. 程序安装准备 首先安装了Arduino板载USB转串口CH340驱动安装包, 若上述程序安装成功,则可以在我的电脑中找到相应的端口 本机端口号为CO ...
- Zybo智能小车识别图像中的文字
智能小车识别图像中的文字 [TOC] 运行平台 这次的内容是基于Xilinx公司的Zybo开发板以及其配套的Zrobot套件开发 Zybo上面的sd卡搭载了Ubuntu12.04LTS的linux版本 ...
- TurnipBit之DIY无线遥控智能小车
一.准备工作 TurnipBit 开发板 2块 TurnipBit 扩展板 1块 数据线 1条 智能小车器件 1套 电机驱动模块(L298N) 1个 在线可视化编程 点击进入 二.思路设计 2 ...
- Arduino智能小车--仅仅是随便一搞
在某宝宝买的智能小车,挺精致的,开心的连接上打印机的线,结果port都没有反应, 查了一下发现是少了驱动,博主用的mac os10.12.3 CH34x_Install_V1.4.pkg 安装好之后我 ...
- 玩转X-CTR100 l 平台-4WD智能小车
我造轮子,你造车,创客一起造起来!更多塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍使用X-CTR100控制器搭建4WD智能 ...
随机推荐
- POJ 1704 Georgia and Bob(阶梯Nim博弈)
Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 11357 Accepted: 3749 Description Geor ...
- angularJS中控制器和作用范围
$scope是$rootScope的子作用域控制对象,$rootScope的id为1,其他的为2,3,4... 不同的控制器之间,所对应的作用域控制对象$scope,之间是相互隔离的,如果要共享数据, ...
- iOS---------- MBProgressHUD (1.0.0)的变动
1.改变菊花的颜色 // hud.color = [UIColor blackColor];--------------> hud.bezelView.color =[UIColor b ...
- Android为TV端助力 android 在5.0以后不允许使用隐式Intent方式来启动Service
android5.0以后不能使用隐式intent :需要指定Intent的ComponentName信息:intent.setComponent(xxx),或指定Intent的setPackage(& ...
- oracle11在docker环境下的运行
目的 Ø 在测试的环境下oracle数据库不存在或访问不方便时,可以将这个环境快速恢复出来 Ø 开发时方便测试之用 可以在任何包含docker服务的机器上运行,具体的docker的安装可以参考如下: ...
- Bayboy功能详解
Bayboy功能详解 一.Badboy中的检查点 1.1以sogou.com搜索为例,搜索测试 步骤:打开Badboy工具,在地址栏中输入搜狗网址:输入 测试 进行搜索:点击红色按钮停止录制 1.2添 ...
- ApplicationContext 配置里dataSource mysql连接数据源,设置ssl和utf-8
?useUnicode&useSSL=false
- Spring扫面路径配置不全导致异常 org.apache.ibatis.binding.BindingException: Invalid bound statement (not found): 的原因
运行Junit测试类 package cn.bgodata.x.zero.service; import org.junit.Test; import org.junit.runner.RunWith ...
- python第一百一十八天---ajax--图片验证码 + Session
原生AJAX Ajax主要就是使用 [XmlHttpRequest]对象来完成请求的操作,该对象在主流浏览器中均存在(除早起的IE),Ajax首次出现IE5.5中存在(ActiveX控件). 1.Xm ...
- Thinkphp框架中自定义修改success和error页面
Thinkphp框架中自定义修改success和error页面 Thinkphp框架的默认success和error太难看,可以自定义设置,步骤如下: (注意:TP原框架中的success跳转有问题, ...