基于RT-Thread的开源飞控StarryPilot
背景描述
近年来无人机应用市场日趋火热,无人机开始被应用在多个领域之中,比如航拍,植保,运输,安防等。随着应用场景的增加,对于无人机的大脑一飞控,的性能和功能要求也变得越来越高。国内具有一大批优质的无人机企业,如DJI,零度,亿航,极飞等。可是这些企业的飞控系统并不开源,而开源飞控市场却基本被国外所垄断,比如APM, PX4, Autoquad等,国内目前还没有一款开源飞控可以与之抗衡,在国际上也没有令人熟知的“国产”开源飞控。 正是基于开发出一款世界知名的中国的开源飞控,我从2016年开始了StarryPilot这个项目。飞控的设计理念是一款轻量,功能强大的飞控,主要面向科研和无人机行业应用,使得无人机开发技术更加普及,也更容易将无人机技术应用到各个行业。

无人机整机

Pixhawk

室外定高飞行
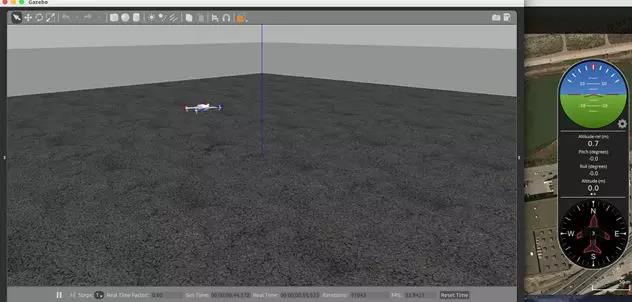
Gazebo HITL(硬件在环)仿真

Msh shell系统
开发环境
主控:STM32F427 + STM32F100(从控制器)
编译环境: Keil MDK5.23
RT-Thread版本: RTT-2.1.0
硬件设计
硬件采用国外开源的自驾仪Pixhawk(https://pixhawk.org/modules/pixhawk), 如下图所示。Pixhawk也是目前世界上应用最广,支持的飞控系统最多的开源飞控硬件。

其主要性能参数如下:
168MHz / 256 MIPS Cortex M4F
14路 PWM/伺服 输出
外扩总线接口 (I2C,CAN,UART)
冗余电源输入
外部安全开关
多色LED指示灯
外置microSD卡槽
传感器:
ST Micro L3GD20 16位陀螺仪
ST Micro LSM303D 16位加速度计/磁力计
Invensense MPU 6000 三轴加速度计/陀螺仪
MEAS MS5611 气压计
接口:
5x UART, 2x CAN, I2C, SPI
DSM/DSM2/DSM-X 卫星兼容输入
PPWM, S-BUS
3.3 和 6.6V ADC输入
microUSB
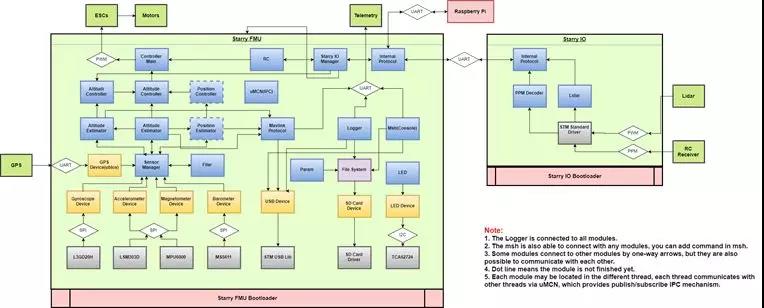
整个系统除了Pixhawk之外,还有一些外接的电子设备,如无刷电机,GPS,电调,数传,RC接收机,Lidar-Lite激光雷达等。整体的系统框架图如下图所示:
软件设计
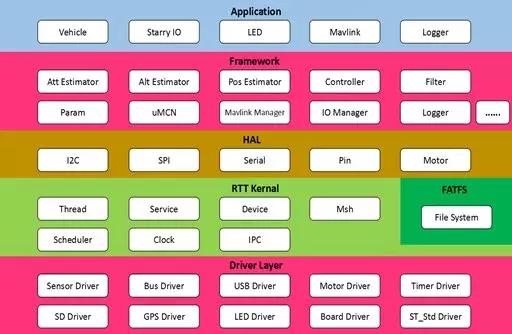
软件采用分层结构设计,如下图所示,从底层到上层分别是Driver层,RTOS(RTT + Fatfs),HAL硬件虚拟层,Framework层和应用层。

一、Driver层
Driver层实现了Pixhawk板载的所有硬件设备的驱动,如传感器设备(陀螺仪,加速度计,磁力计,气压计等),总线设备(UART, I2C, SPI等),USB,电机驱动,SD卡驱动,GPS驱动,LED灯以及一些板载设备的驱动。 各个驱动以Device的形式向RTT进行注册,并且提供各自的init(), read(), write, ioctrl()函数供上层调用。这里仅以hmc5883磁力计的驱动举例说明驱动程序的一般设计步骤。
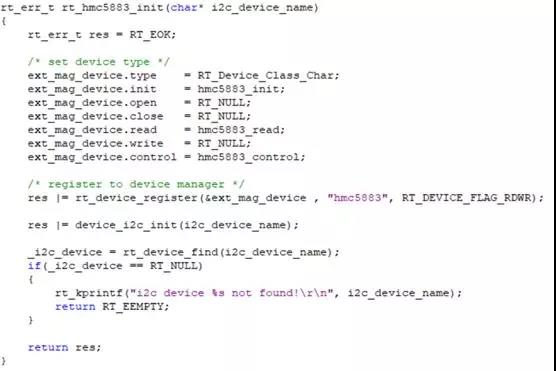
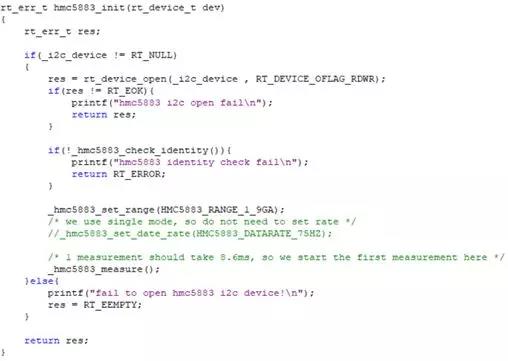
- 设备初始化函数
如下为hmc5883的初始化函数。首先对设备的功能函数进行函数指针赋值,这里定义了init(), read()和ioctrl()三个函数。然后向RTT注册名为hmc5883的驱动设备,上层可以通过查找设备名的方式来获取该驱动设备。接下来就是给hmc5883设置对应的总线设备。这里 hmc5883使用的是i2c通信,所以初始化中会为其查找对应的i2c设备。
- init()函数
Init()函数主要做一些芯片的初始化的工作,包括寄存器配置等。
- read()函数
read()函数实现设备数据读取的功能,如原始磁场数据和标定后的磁场数据读取。

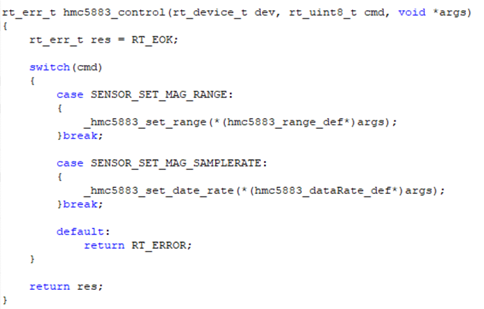
- ioctrl()函数
Ioctrl()函数主要实现一些设备的配置功能,如设置测量磁场的范围,采样频率等。
二、RTOS层
RTOS采用RT-Thread嵌入式操作系统,它的功能强大,除了提供基本的线程调度,内存管理,同步等基本功能外,还提供了如msh的shell系统,device设备驱动系统,使得系统的整体架构更加清晰,功能也更加完善。
三、HAL层
HAL层主要是对底层驱动设备进行进一步封装,将具体的设备抽象为一个类别的设备。以串口设备为例,不同的硬件平台,串口的底层驱动会有差异,通过HAL层,将串口设备封装为统一的接口,这样当系统移植到不同平台的时候,上层代码不需要做任何改变,而只需要将对应底层驱动进行简单替换就行。这将大大降低系统移植的复杂程度。
四、Framework层
Framework层实现了飞控设备的主要功能,如姿态估计,位置估计,控制器,通信,日志管理等等。可以说,这一层是整个系统的核心,大部分的功能模块都在这一层来实现。
五、Application层
应用层是将飞控的各个大的功能进行分割,变成一个个小的功能。每个功能在系统中为一个单独的线程,每个线程负责执行自己的任务,并且跟其他线程通过IPC进行通信。Vehicle线程具有最高优先级,执行周期为1ms。其负责实现无人机飞行相关的所有功能,如状态估计和电机的控制。
启动流程
下面介绍一下系统的启动流程. 启动流程沿用RTT提供的原始结构。首先在rtthread_startup()函数中进行RTOS的一些初始化,然后进入到rt_application_init()中。 在这个函数中会建立一个init的初始线程,在这个线程中,会对飞控各个模块进行初始化的工作。在初始化完成之后,会根据Application层的定义,建立各个线程,并唤醒,最后将init线程自己给销毁掉,避免不必要的内存消耗。
演示视频
控制算法和飞行效果测试( ADRC vs PID ) 暂时无法上传 可以关注 “RT-Thread物联网操作系统”公众号浏览
项目特色
使用RT-Thread嵌入式操作系统, Fatfs文件系统,完整的系统功能支持(如跨进程通信,文件管理,参数系统等)
基于Pixhawk硬件平台开发,完美支持Pixhawk硬件
ADRC控制和PID(串级)控制
支持Mavlink协议(QGC地面站)
支持Gazebo硬件在环(HITL)仿真
Msh指令系统,提供丰富以及可扩展的系统指令
Log日志系统,方便抓取飞行日志信息,并提供相应的日志查看工具。
基于最小二乘法的最优椭球拟合校准算法(可校准零偏误差,缩放误差,非正交误差),可用于磁力计和加速度计的校准
软件代码: https://github.com/JcZou/StarryPilot
基于RT-Thread的开源飞控StarryPilot的更多相关文章
- RT Thread 通过ENV来配置SFUD,操作SPI Flash
本实验基于正点原子stm32f4探索者板子 请移步我的RT Thread论坛帖子. https://www.rt-thread.org/qa/forum.php?mod=viewthread& ...
- NodeBB – 基于 Node.js 的开源论坛系统
NodeBB 是一个更好的论坛平台,专门为现代网络打造.它是免费的,易于使用. NodeBB 论坛软件是基于 Node.js 开发,支持 Redis 或 MongoDB 的数据库.它利用 Web So ...
- 基于存储过程的MVC开源分页控件
基于存储过程的MVC开源分页控件--LYB.NET.SPPager 摘要 现在基于ASP.NET MVC的分页控件我想大家都不陌生了,百度一下一大箩筐.其中有不少精品,陕北吴旗娃杨涛大哥做的分页控件M ...
- 基于Eclipse IDE的Ardupilot飞控源码阅读环境搭建
基于Eclipse IDE的Ardupilot飞控源码阅读环境搭建 作者:Awesome 日期:2017-10-21 需准备的软件工具 Ardupilot飞控源码 PX4 toolchain JAVA ...
- 分享一个基于小米 soar 的开源 sql 分析与优化的 WEB 图形化工具
soar-web 基于小米 soar 的开源 sql 分析与优化的 WEB 图形化工具,支持 soar 配置的添加.修改.复制,多配置切换,配置的导出.导入与导入功能. 环境需求 python3.xF ...
- TriAquae 是一款由国产的基于Python开发的开源批量部署管理工具
怀着鸡动的心情跟大家介绍一款国产开源运维软件TriAquae,轻松帮你搞定大部分运维工作!TriAquae 是一款由国产的基于Python开发的开源批量部署管理工具,可以允许用户通过一台控制端管理上千 ...
- 微信小程序--简约风博客小程序(基于云开发 - 全开源)
微信小程序--简约风博客小程序(基于云开发 - 全开源) 项目启动纯属突发奇想,想看看博客小程序,例如wehalo博客小程序,但是感觉自建平台还要浪费自己的服务器算力,还没有访问量,省省吧. 本着白嫖 ...
- CountBoard 是一个基于Tkinter简单的,开源的桌面日程倒计时应用
CountBoard 是一个基于Tkinter简单的,开源的桌面日程倒计时应用. 项目地址 https://github.com/Gaoyongxian666/CountBoard 基本功能 置顶功能 ...
- 基于tp5的免费开源企业官网系统
基于tp5的免费开源企业官网系统 基本功能: 自定义菜单,单页 添加新闻文章前台展示 前台页面自动适配电脑与手机端等.后台模板用的是:AdminLTE 项目放在github上有兴趣开源下载看看 htt ...
随机推荐
- Verilog模块概念和实例化#转载自Jason from Lofter
Verilog模块概念和实例化 模块的概念 模块(module)是verilog最基本的概念,是v设计中的基本单元,每个v设计的系统中都由若干module组成. 1.模块在语言形式上是以关键词modu ...
- VLAN实验(3)
1.选择2台S3700和5台pc机,并根据实验编址完成此拓扑图. 2.启动设备,检查设备的连通性: 由于现在我们还没有划分VLAN,这5台PC,还在同一个VLAN中,现在我们启动所有的设备,这是所有的 ...
- windows系统两个网卡如何同时使用?内网和外网共用,配置教程
有些企业的网络分为内网和外网,一般内网不能访问Internet,但是又不提供外网,自己有上外网的需求,所以可能会用到双网卡,无线网卡+有线网卡或者有线+有线... 本文就是为了解决此问题,主要的做法就 ...
- Gemini.Workflow 双子工作流高级教程:数据库设计及各表作用说明
整体数据库设计,可见这一篇:Gemini.Workflow 双子工作流高级教程:数据库-设计文档 这里对各数据表进行介绍: 工作流里的设计表并不多,核心只有以下8个: 下面按照流程的顺序来介绍一下表的 ...
- python字符串、正则-xdd
1.分割字符串 str.split(sep,maxsplit) #(分隔符,分几次) 2.合并字符串 str2=string.join(iterable) #str2='@'.join(list1) ...
- 老男孩python 自学day09 函数开始
什么是函数? 函数用关键字def定义 语法: def 函数名(形参): 函数体 return 调用 函数名(实参) 命名规则:和变量一样 1. 由数字, 字母, 下划线组成 2. 不能数字开头. 更不 ...
- ctf中关于图片的隐写随笔(不全)
①JPG图片的结束符,十六进制常为FFD9 ②binwalk的原理是:检查常见的文件头信息,如果不符合,一定有隐藏信息.③JPG是有损压缩,PNG是无损压缩,BMP是不压缩. 隐写的基本原理:图片查看 ...
- 为什么坚果云Markdown值得使用?
值得使用说明是被认为有价值的,值得有两种意思的解释:1.有价值,有意义:2.价钱合适,合算:那么坚果云Markdown是否是人们值得使用的呢?下面就来看看坚果云Markdown到底是什么?为什么值得使 ...
- poj 2991 起重机
地址 http://poj.org/problem?id=2991 题解 本来以为这是一个简单的线段树模板 不料始终不太明白线段树如何记录转动角度后的各个线段端的XY值 学习了网络上的一些博客题解 感 ...
- [ch04-03] 用神经网络解决线性回归问题
系列博客,原文在笔者所维护的github上:https://aka.ms/beginnerAI, 点击star加星不要吝啬,星越多笔者越努力. 4.3 神经网络法 在梯度下降法中,我们简单讲述了一下神 ...