caffe层解读-softmax_loss
转自https://blog.csdn.net/shuzfan/article/details/51460895。
Loss Function
softmax_loss的计算包含2步:
(1)计算softmax归一化概率
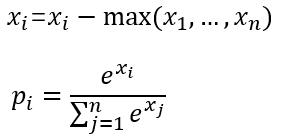
(2)计算损失

这里以batchsize=1的2分类为例:
设最后一层的输出为[1.2 0.8],减去最大值后为[0 -0.4],
然后计算归一化概率得到[0.5987 0.4013],
假如该图片的label为1,则Loss=-log0.4013=0.9130
可选参数
(1) ignore_label
int型变量,默认为空。
如果指定值,则label等于ignore_label的样本将不参与Loss计算,并且反向传播时梯度直接置0.
(2) normalize
bool型变量,即Loss会除以参与计算的样本总数;否则Loss等于直接求和
(3) normalization
enum型变量,默认为VALID,具体代表情况如下面的代码。
enum NormalizationMode {
// Divide by the number of examples in the batch times spatial dimensions.
// Outputs that receive the ignore label will NOT be ignored in computing the normalization factor.
FULL = ;
// Divide by the total number of output locations that do not take the
// ignore_label. If ignore_label is not set, this behaves like FULL.
VALID = ;
// Divide by the batch size.
BATCH_SIZE = ;
//
NONE = ;
}
归一化case的判断:
(1) 如果未设置normalization,但是设置了normalize。
则有normalize==1 -> 归一化方式为VALID
normalize==0 -> 归一化方式为BATCH_SIZE
(2) 一旦设置normalization,归一化方式则由normalization决定,不再考虑normalize。
使用方法
layer {
name: "loss"
type: "SoftmaxWithLoss"
bottom: "fc1"
bottom: "label"
top: "loss"
top: "prob"
loss_param{
ignore_label:
normalize:
normalization: FULL
}
}
扩展使用
(1) 如上面的使用方法中所示,softmax_loss可以有2个输出,第二个输出为归一化后的softmax概率
(2) 最常见的情况是,一个样本对应一个标量label,但softmax_loss支持更高维度的label。
当bottom[0]的输入维度为N*C*H*W时,
其中N为一个batch中的样本数量,C为channel通常等于分类数,H*W为feature_map的大小通常它们等于1.
此时我们的一个样本对应的label不再是一个标量了,而应该是一个长度为H*W的矢量,里面的数值范围为0——C-1之间的整数。
至于之后的Loss计算,则采用相同的处理。
caffe层解读-softmax_loss的更多相关文章
- caffe层解读系列-softmax_loss
转自:http://blog.csdn.net/shuzfan/article/details/51460895 Loss Function softmax_loss的计算包含2步: (1)计算sof ...
- 【Android】Sensor框架Framework层解读
Sensor整体架构 整体架构说明 黄色部分表示硬件,它要挂在I2C总线上 红色部分表示驱动,驱动注册到Kernel的Input Subsystem上,然后通过Event Device把Sensor数 ...
- proposal_layer.py层解读
proposal_layer层是利用训练好的rpn网络来生成region proposal供fast rcnn使用. proposal_layer整个处理过程:1.生成所有的anchor,对ancho ...
- anchor_target_layer层解读
总结下来,用generate_anchors产生多种坐标变换,这种坐标变换由scale和ratio来,相当于提前计算好.anchor_target_layer先计算的是从feature map映射到原 ...
- caffe dropout解读
先上caffe dropout_layer.cpp源码,如下: // LayerSetUp DCHECK(threshold_ > 0.); DCHECK(threshold_ < 1.) ...
- 【Android】Sensor框架HAL层解读
Android sensor构建 Android4.1 系统内置对传感器的支持达13种,他们分别是:加速度传感器(accelerometer).磁力传感器(magnetic field).方向传感器( ...
- 修改caffe层的一般流程
https://blog.csdn.net/u012273127/article/details/78701161
- slover层解读
void Solver<Dtype>::UpdateSmoothedLoss(Dtype loss, int start_iter, int average_loss) { if (los ...
- caffe︱ImageData层、DummyData层作为原始数据导入的应用
Part1:caffe的ImageData层 ImageData是一个图像输入层,该层的好处是,直接输入原始图像信息就可以导入分析. 在案例中利用ImageData层进行数据转化,得到了一批数据. 但 ...
随机推荐
- c博客作业01--顺序分支结构
0.展示PTA总分 1.本章学习总结 1.1 学习内容总结 1.运算符需注意的要点 '/'的左右两边如果均为整型数,其结果也为整型:'%'的左右两边只能为整型数: 优先级:逻辑运算符<关系运算符 ...
- Java运算符和类型转换
以下代码输出结果是: public class Test { public static void main(String[] args) { int a = 5; System.out.printl ...
- Java获取两个指定日期之间的所有月份
String y1 = "2016-02";// 开始时间 String y2 = "2019-12";// 结束时间 try { Date startDate ...
- nginx reload和reopen
nginx被停止(nginx -s stop)或者直接杀掉了进程(kill -9 nginx的进程号)后,调用命令(nginx -s reload 或者 nginx -s reopen)会报错:无法找 ...
- MongoDB 关系型数据库表(集合)与表(集合)之间的几种关系
简述关系数据库中表与表的 3 种关系 一对一的关系:例如:一个人对应一个唯一的身份证号,即为一对一的关系. 一对多关系 :例如:一个班级对应多名学生,一个学生只能属于一个班级,即为一对多关系 多对多关 ...
- Eclipse 高亮显示(pydev 编辑 python)
因为是使用pydev编辑的python,所以需要修改(pydev)的属性. Window->Preferences->General->Editors->Text Editor ...
- Runtime Only和Runtime + Compiler
如果你需要在客户端编译模板 (比如传入一个字符串给 template 选项,或挂载到一个元素上并以其 DOM 内部的 HTML 作为模板),就将需要加上编译器,即完整版 当使用 vue-loader ...
- Unity3D获取Android平台的电量
刚开始的时候以为这个应该不简单.我也开始百度,寻找获取手机的电量的方法.大概有俩种方式:一种是直接访问一个文件,意思是说Android手机的电量等信息保存到了这个文件中.但是我试验的时候没有访问出来, ...
- pytorch ImageFolder的覆写
在为数据分类训练分类器的时候,比如猫狗分类时,我们经常会使用pytorch的ImageFolder: CLASS torchvision.datasets.ImageFolder(root, tran ...
- xmlns:amq="http://activemq.apache.org/schema/core"报错
如题,项目集成ActiveMQ是配置文件报错 原因是:Spring命名空间配置错误,缺少相应的spring-bean.很显然,引用不到就是没有jar包啊. 我的解决办法,早pom.xml引用依赖 &l ...