(二)STM32开发例程
1控制LED和继电器
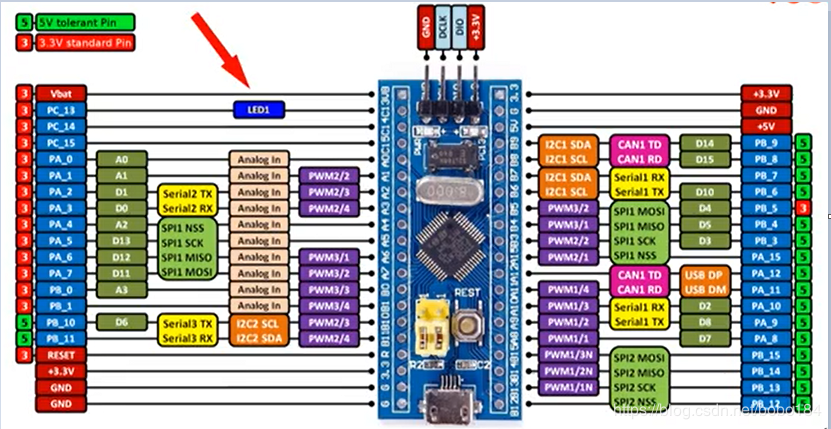
除了 PA11和PA12其他都可以
void setup() {
pinMode(PC13, OUTPUT);
pinMode(PC14, OUTPUT);
pinMode(PC15, OUTPUT);
pinMode(PA0, OUTPUT);
pinMode(PA1, OUTPUT);
pinMode(PA2, OUTPUT);
pinMode(PA3, OUTPUT);
pinMode(PA4, OUTPUT);
pinMode(PA5, OUTPUT);
pinMode(PA6, OUTPUT);
pinMode(PA7, OUTPUT);
pinMode(PA8, OUTPUT);
pinMode(PA9, OUTPUT);
pinMode(PA10, OUTPUT);
// pinMode(PA11, OUTPUT); // CAN t0 不能用
// pinMode(PA12, OUTPUT); // CAN r0 不能用
pinMode(PA15, OUTPUT);
pinMode(PB0, OUTPUT);
pinMode(PB1, OUTPUT);
pinMode(PB2, OUTPUT);
pinMode(PB3, OUTPUT);
pinMode(PB4, OUTPUT);
pinMode(PB5, OUTPUT);
pinMode(PB6, OUTPUT);
pinMode(PB7, OUTPUT);
pinMode(PB8, OUTPUT);
pinMode(PB9, OUTPUT);
pinMode(PB10, OUTPUT);
pinMode(PB11, OUTPUT);
pinMode(PB12, OUTPUT);
pinMode(PB13, OUTPUT);
pinMode(PB14, OUTPUT);
pinMode(PB15, OUTPUT);
}
void loop() {
digitalWrite(PC13, HIGH);
digitalWrite(PC14, HIGH);
digitalWrite(PC15, HIGH);
digitalWrite(PA0, HIGH);
digitalWrite(PA1, HIGH);
digitalWrite(PA2, HIGH);
digitalWrite(PA3, HIGH);
digitalWrite(PA4, HIGH);
digitalWrite(PA5, HIGH);
digitalWrite(PA6, HIGH);
digitalWrite(PA7, HIGH);
digitalWrite(PA8, HIGH);
digitalWrite(PA9, HIGH);
digitalWrite(PA10, HIGH);
// digitalWrite(PA11, HIGH);
// digitalWrite(PA12, HIGH);
digitalWrite(PA15, HIGH);
digitalWrite(PB0, HIGH);
digitalWrite(PB1, HIGH);
digitalWrite(PB2, HIGH);
digitalWrite(PB3, HIGH);
digitalWrite(PB4, HIGH);
digitalWrite(PB5, HIGH);
digitalWrite(PB6, HIGH);
digitalWrite(PB7, HIGH);
digitalWrite(PB8, HIGH);
digitalWrite(PB9, HIGH);
digitalWrite(PB10, HIGH);
digitalWrite(PB11, HIGH);
digitalWrite(PB12, HIGH);
digitalWrite(PB13, HIGH);
digitalWrite(PB14, HIGH);
digitalWrite(PB15, HIGH);
delay(1000);
digitalWrite(PC13, LOW);
digitalWrite(PC14, LOW);
digitalWrite(PC15, LOW);
digitalWrite(PA0, LOW);
digitalWrite(PA1, LOW);
digitalWrite(PA2, LOW);
digitalWrite(PA3, LOW);
digitalWrite(PA4, LOW);
digitalWrite(PA5, LOW);
digitalWrite(PA6, LOW);
digitalWrite(PA7, LOW);
digitalWrite(PA8, LOW);
digitalWrite(PA9, LOW);
digitalWrite(PA10, LOW);
// digitalWrite(PA11, LOW);
// digitalWrite(PA12, LOW);
digitalWrite(PA15, LOW);
digitalWrite(PB0, LOW);
digitalWrite(PB1, LOW);
digitalWrite(PB2, LOW);
digitalWrite(PB3, LOW);
digitalWrite(PB4, LOW);
digitalWrite(PB5, LOW);
digitalWrite(PB6, LOW);
digitalWrite(PB7, LOW);
digitalWrite(PB8, LOW);
digitalWrite(PB9, LOW);
digitalWrite(PB10, LOW);
digitalWrite(PB11, LOW);
digitalWrite(PB12, LOW);
digitalWrite(PB13, LOW);
digitalWrite(PB14, LOW);
digitalWrite(PB15, LOW);
delay(1000);
}
2 PWM控制
PWM引脚简易测试程序,总共有12个PWM引脚,16bit即65536级PWM,很精密了:
延迟给100微妙 多了少了都有问题,不正常转
void setup()
{
pinMode(PB0, PWM);
pinMode(PA7, PWM);
pinMode(PA6, PWM);
pinMode(PA3, PWM);
pinMode(PA2, PWM);
pinMode(PA1, PWM);
pinMode(PA0, PWM);
pinMode(PB7, PWM);
pinMode(PB6, PWM);
pinMode(PA10, PWM);
pinMode(PA9, PWM);
pinMode(PA8, PWM);
}
void loop()
{
for (int i = 1000; i < 65536; i++)
{
//delayMicroseconds(100);
// delay(1);
delay(20);
pwmWrite(PB0, i);
pwmWrite(PA7, i);
pwmWrite(PA6, i);
pwmWrite(PA3, i);
pwmWrite(PA2, i);
pwmWrite(PA1, i);
pwmWrite(PA0, i);
pwmWrite(PB7, i);
pwmWrite(PB6, i);
pwmWrite(PA10, i);
pwmWrite(PA9, i);
pwmWrite(PA8, i);
}
for (int i = 65536; i > 1000; i--)
{
// delayMicroseconds(100);
// delay(1);
delay(20);
pwmWrite(PB0, i);
pwmWrite(PA7, i);
pwmWrite(PA6, i);
pwmWrite(PA3, i);
pwmWrite(PA2, i);
pwmWrite(PA1, i);
pwmWrite(PA0, i);
pwmWrite(PB7, i);
pwmWrite(PB6, i);
pwmWrite(PA10, i);
pwmWrite(PA9, i);
pwmWrite(PA8, i);
}
}
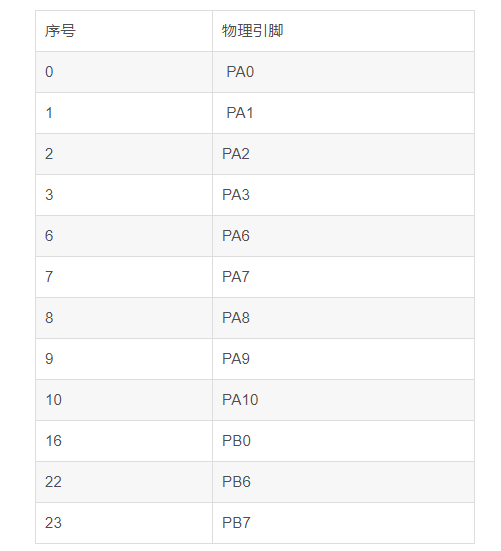
int pins[12] = {0, 1, 2, 3, 6, 7, 8, 9, 10, 16, 22, 23};
void setup()
{
for (int i = 0; i < 12; i++)
{
pinMode(pins[i], PWM);
}
}
void loop()
{
for (int i = 0; i < 100; i++)
{
for (int j = 0; j < 12; j++)
{
pwmWrite(pins[j], i * i);
}
delay(20);
}
}
IO引脚读取
int value = digitalRead(pin);
ADC引脚
实际测试 0-4096 2的10次方

在pa7接一个光敏电阻,完全遮盖4095 手机强光基本几十
void setup()
{
Serial.begin(115200);
pinMode(PB0, INPUT_ANALOG);
pinMode(PA7, INPUT_ANALOG);
pinMode(PA6, INPUT_ANALOG);
pinMode(PA5, INPUT_ANALOG);
pinMode(PA4, INPUT_ANALOG);
pinMode(PA3, INPUT_ANALOG);
pinMode(PA2, INPUT_ANALOG);
pinMode(PA1, INPUT_ANALOG);
pinMode(PA0, INPUT_ANALOG);
pinMode(PB1, INPUT_ANALOG);
}
void loop()
{
delay(50);
Serial.print("\tPB0="); Serial.print(analogRead(PB0));
Serial.print("\tPA7="); Serial.print(analogRead(PA7));
Serial.print("\tPA6="); Serial.print(analogRead(PA6));
Serial.print("\tPA5="); Serial.print(analogRead(PA5));
Serial.print("\tPA4="); Serial.print(analogRead(PA4));
Serial.print("\tPA3="); Serial.print(analogRead(PA3));
Serial.print("\tPA2="); Serial.print(analogRead(PA2));
Serial.print("\tPA1="); Serial.print(analogRead(PA1));
Serial.print("\tPA0="); Serial.print(analogRead(PA0));
Serial.print("\tPB1="); Serial.println(analogRead(PB1));
}
中断
void onChange()
{
if ( digitalRead(PA8) == LOW )
Serial.println("Key Down");
else
Serial.println("Key UP");
} void setup()
{
Serial.begin(9600); //打开串口 pinMode( PA8, INPUT);//设置管脚为输入 //Enable中断管脚, 中断服务程序为onChange(), 监视引脚变化
/*
LOW 低电平触发
CHANGE 电平变化,高电平变低电平、低电平变高电平
RISING 上升沿触发
FALLING 下降沿触发
HIGH 高电平触发(该中断模式仅适用于Arduino due)
*/
attachInterrupt( PA8, onChange, CHANGE);
} void loop()
{
// 模拟长时间运行的进程或复杂的任务。
for (int i = 0; i < 100; i++)
{
// 什么都不做,等待10毫秒
delay(10);
}
}
允许的串口
总共3个硬件外接串口Serial1、Serial2、Serial3,一个USB虚拟串口Serial:
void setup()
{
Serial.begin(115200);
Serial1.begin(115200); //TX=PA9,RX=PA10
Serial2.begin(115200); //TX=PA2,RX=PA3
Serial3.begin(115200); //TX=PB10,RX=PB11
}
void loop()
{
delay(100);
Serial.println("Test Serial");
Serial1.println("Test Serial1");
Serial2.println("Test Serial2");
Serial3.println("Test Serial3");
}
(二)STM32开发例程的更多相关文章
- 转载:百为STM32开发板教程之十二——NAND FLASH
http://bbs.21ic.com/icview-586200-1-1.html 百为STM32开发板教程之十二——NAND FLASH 参考资料:百为stm32开发板光盘V3\百为stm32开发 ...
- stm32开发笔记(二):stm32系列使用V3.5固件库的帮助文件以及GPIO基本功能(一)
前言 stm32系列是最常用的单片机之一,不同的版本对应除了引脚.外设.频率.容量等'不同之外,其开发的方法是一样的. 本章讲解使用库函数使用GPIO引脚功能. 补充 本文章为多年前学习 ...
- 如何查找STM32开发资料
Ⅰ.概述 该文写给那些处于初学ST芯片开发.英文不好而又想偷懒的人. 该文主要的目的是提醒大家:学习一门技术是需要舍得花功夫,捷径是你在起点与终点之间不断的探索,最终总结出来的一条适合自己的路. 下面 ...
- stm32开发之标准库的介绍
1 STM32标准外设库概述 STM32标准外设库之前的版本也称固件函数库或简称固件库,是一个固件函数包,它由程序.数据结构和宏组成,包括了微控制器所有外设的性能特征.该函数库还包括每一个外设的驱动描 ...
- 浩顺AC671指纹考勤机二次开发(demo)
关于考勤机 AC671,是新换的机器,以前的那部机器,通过网络死活连接不上,换了AC671网络连接是好用了.但是,我要吐槽 浩顺的考勤机应该是卖了很多了吧,可是自带的软件太不给力,最后分析出来的数据一 ...
- windows下STM32开发环境的搭建
一.概述 1.说明 笔者已经写了一篇Linux下STM32开发环境的搭建 ,这两篇文章的最区别在于开发环境所处的系统平台不一样,而其实这个区别对于开发环境的搭建其实影响不大,制作局部上的操作上发生了改 ...
- Linux下STM32开发环境的搭建
目录 一.概述 1.目的 2.开发环境描述 3.Eclipse构建的STM32集成开发环境结构 4.GDB / GDB Server 调试模型 二.搭建步骤 三.详细的搭建过程 1.安装eclipse ...
- ubuntu linux下建立stm32开发环境: 程序烧录 openocd+openjtag
原文出处: http://blog.csdn.net/embbnux/article/details/17619621 之前建立stm32开发环境,程序也已经编译好生成main.bin,接下来就是要把 ...
- 转载:百为STM32开发板教程之十一——NOR FLASH
转载:http://bbs.21ic.com/icview-586199-1-1.html 百为STM32开发板教程之十一——NOR FLASH 参考文档:百为stm32开发板光盘\st官方参考资料\ ...
随机推荐
- axios详解
一.说明 Axios是一个基于Promise(ES6中用于处理异步的)的HTTP库(HTTP客户端),用于浏览器和node.js中,API. 浏览器中创建XMLHttpRequests 从node.j ...
- EasyPoi导出问题
导出代码如下:Workbook workbook = ExcelExportUtil.exportExcel(new ExportParams(), PriceExcelModel.class, pr ...
- html5手机端播放音效不卡的方法
html5手机端播放音效不卡的方法线下载http://wxserver.knowway.cn/solosea/js/audioEngine.js 这个是性能不错 然后直接播放音效就可以了 audioE ...
- mybatis使用associaton进行分步查询
Employee类 public class Employee { private Integer id; private String lastName; private String email; ...
- mysql操作(精简版)
一.数据库操作(建库.删库) 1.查看数据库:show databases; 2.创建数据库:DROP DATABASE 数据库名; 3.删除数据库:CREATE DATABASE 数据库名; 4.使 ...
- Vue.js 源码分析(五) 基础篇 方法 methods属性详解
methods中定义了Vue实例的方法,官网是这样介绍的: 例如:: <!DOCTYPE html> <html lang="en"> <head&g ...
- NET/Regex 处理连续空格
问题: 就是一个字符串呀,一个字符串,里面的话有一个空格,有可能有连续空格,你遇到连续空格,把这个连续空格变成一个空格,一个空格地不处理. 代码: /// <summary> /// 处理 ...
- 写一个TimeUI显示的函数,上代码
public void FreshDateTime() { string strWeek = string.Empty; #region 格式化星期 switch (DateTime.Now.DayO ...
- Sql语句groupBY分组后取最新一条记录的SQL
一.问题 groupBY分组后取最新一条记录的SQL的解决方案. 二.解决方案 select Message,EventTime from PT_ChildSysAlarms as a where E ...
- 线程状态---Day24
线程状态概述: 当线程被创建并启动以后,它既不是一启动就进入了执行状态,也不是一直处于执行状态.在线程的生命周期中, 有几种状态呢?在API中 java.lang.Thread.State 这个枚举中 ...