极路由4pro(HC5962)安装python
基本配置
其实极路由4、极路由4 pro、极路由B70都是一个型号的(HC5962)
CPU:MT7621AT + MT7612EN + 7603EN
内存:256MB DDR3 RAM
闪存:128MB NAND flash
网卡:1+3 x 1000M Ethernet
USB:1x USB 2.0 port. 1x USB 3.0 port
主板:UART pad on PCB (JP3: TX, RX, GND, 3.3V)
操作系统:HIWIFI OS(基于OpenWrt 的 Barrier Breaker 14.07版本)
CPU是ramips架构的,常用于嵌入式设备如路由器。cpu架构的还有x86、ARM等,x86就是我们常用的台式机、服务器、笔记本电脑的架构,ARM即手机用的架构。
安装python步骤
其实自己重刷OpenWrt固件也是可以的,但毕竟会有变砖的风险,另外官方固件挺好看,插件挺好用的,本身也是基于OpenWrt改的,因此觉得没必要刷固件啊
于是找了两天教程,试了很多次,终于在不刷新固件的情况下装python了!
参考这个教程,根据教程我做了一些改动
1 生成/etc/opkg.conf.2文件(这样可以不影响原来的/etc/opkg.conf文件),写入如下内容,注意dest usb /soft这一句,应该修改为你自己的硬盘目录以防止路由器空间不够用
dest root /
dest ram /tmp
lists_dir ext /var/opkg-lists
option overlay_root /overlay
dest usb /soft
arch all 100
arch ramips_24kec 200
arch ramips 300
arch mips 400
arch unkown 500
src/gz barrier_breaker_base http://downloads.openwrt.org/barrier_breaker/14.07/ramips/mt7620a/packages/base
src/gz barrier_breaker_luci http://downloads.openwrt.org/barrier_breaker/14.07/ramips/mt7620a/packages/luci
src/gz barrier_breaker_management http://downloads.openwrt.org/barrier_breaker/14.07/ramips/mt7620a/packages/management
src/gz barrier_breaker_oldpackages http://downloads.openwrt.org/barrier_breaker/14.07/ramips/mt7620a/packages/oldpackages
src/gz barrier_breaker_packages http://downloads.openwrt.org/barrier_breaker/14.07/ramips/mt7620a/packages/packages
src/gz barrier_breaker_routing http://downloads.openwrt.org/barrier_breaker/14.07/ramips/mt7620a/packages/routing
src/gz barrier_breaker_telephony http://downloads.openwrt.org/barrier_breaker/14.07/ramips/mt7620a/packages/telephony
可以看到更新源是http://downloads.openwrt.org/barrier_breaker/14.07/ramips/mt7620a,即 barrier_breaker 14.07版本的openwrt,ramips的cpu架构、mt7620a型号的cpu。
这里我有些奇怪,我的路由器是mt7621at的,为什么还能用mt7620a,有知道的朋友请留言一下。
barrier_breaker 14.07版本没有mt7621at可选,也只能用mt7620a了。

另外我还试过chaos_calmer 15.05.1版本的mt7621,但内核版本不一致肯定是不能用啦。
2 运行下面这句命令去获取安装源中的最新文件
这一步一定要做,不然可能看到的是/var/opkg-lists目录下缓存的文件,就看不到python安装源了
opkg -f /etc/opkg.conf.2 update
3 安装libc,教程说最好直接安装到根目录下而不是外接硬盘中
wget http://downloads.openwrt.org/barrier_breaker/14.07/ramips/mt7620a/packages/base/libc_0.9.33.2-1_ramips_24kec.ipk
opkg install libc_0.9.33.2-1_ramips_24kec.ipk
4 安装python到外接硬盘中
opkg -f /etc/opkg.conf.2 -d usb install libreadline
opkg -f /etc/opkg.conf.2 -d usb install python
opkg -f /etc/opkg.conf.2 -d usb install python-json
opkg -f /etc/opkg.conf.2 -d usb install python-curl
opkg -f /etc/opkg.conf.2 -d usb install python-openssl
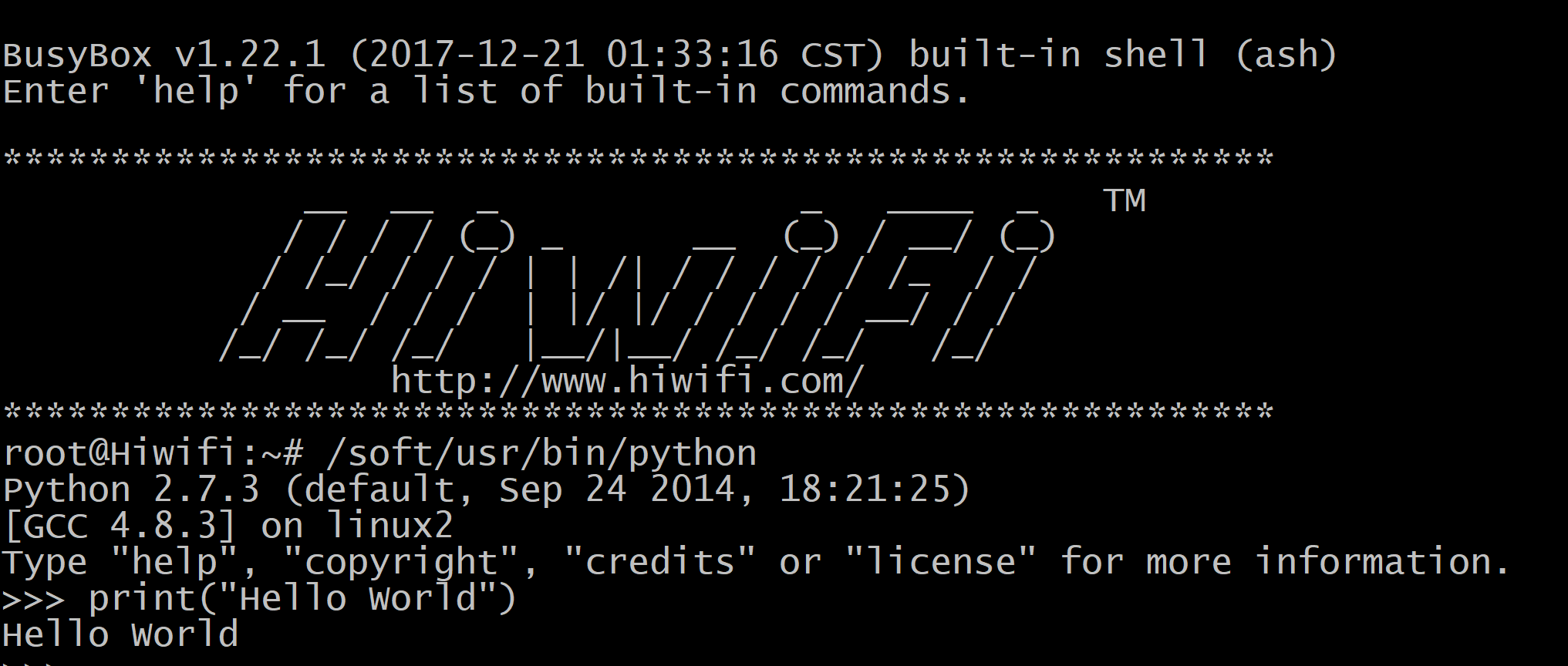
5. 设置环境变量,做这一步是为了在任意目录下都能去执行python
注意我下面写的是/soft,需要改为安装python的目录
export PATH=$PATH:/soft/usr/bin
到这里安装python就成功啦!~
下回研究一下怎么安装jamvm跑java
极路由4pro(HC5962)安装python的更多相关文章
- 极路由4pro交叉编译c、c++的代码
首先在官方文档中下载SDK 极路由4pro是mtmips架构,即32位mips,小端的,因此下载这个 防止官方的下载链接失效,特意上传到百度网盘: 链接:https://pan.baidu.com/s ...
- 极路由4pro(HC5962)设置阿里云DDNS
v2ex有个帖子说用Dnspod的API可以一行搞定,不过我既然买的是阿里云的域名还是想尽量用阿里云的API,感觉比较安全,另外修改解析记录后也会自动发邮件通知,所以还是调用阿里云的API吧.阿里云的 ...
- 极路由4pro安装java(Jamvm 2.0.0 + gnu classpath 0.9.8)
首先试了gnu classpath 0.9.9,编译不过后来改成0.9.8 编译环境 OS: 64位 Ubuntu 16.04 LTS(vmware虚拟机) SDK: 用之前讲过的官方SDKmtmip ...
- 极路由设置共享磁盘密码、跨网访问samba服务
极路由插上移动硬盘后会自动建立samba服务器,但我们没法去配置哪些盘符需要密码,这样只要在同一个wifi下的电脑都能去访问这些东西了,比较弱智.另外我还想再公司中去读写这个移动硬盘. 设置密码 首先 ...
- 教你如何在Drcom下使用路由器上校园网(以广东工业大学、极路由1S HC5661A为例)
免责声明: 在根据本教程进行实际操作时,如因您操作失误导致出现的一切意外,包括但不限于路由器变砖.故障.数据丢失等情况,概不负责: 该技术仅供学习交流,请勿将此技术应用于任何商业行为,所产生的法律责任 ...
- 极路由2(极贰)ROOT并刷了OpenWrt
绕过官方的ROOT 查了一下root教程, 如果还需要保留保修, 则需要自己想办法回退版本, 下载搜狐插件到sd卡, 找个linux系统修改sd卡上程序的执行权限, 然后才能开启ssh, 具体的方法可 ...
- 如何用极路由+OpenWrt+SDR电视棒搭建SDR服务器
0×00 前言 近期因为有个从异地捕获无线信号的需求,便尝试着用OpenWrt+公网IP搭建了一台SDR服务器.如果有小伙伴嫌SDR硬件天线看起来太乱.或者电脑没有足够的USB接口也可在局域网搭建SD ...
- 极路由访问Apple Store可以浏览但是不能下载的解决方案
最近在家里上网突然发现Apple Store不能更新了.重启路由器发现最开始一会是能下载更新的,但是过了一会就完全不能下载更新了.很是奇怪,今天特意分析了一下这个问题. 首先,抓包确定Apple St ...
- 如何用极路由+OpenWrt+RTL电视棒搭建一台SDR服务器,并隐秘地捕获和传输数据
0×00 前言 近期因为有个从异地捕获无线信号的需求,便尝试着用OpenWrt+公网IP搭建了一台SDR服务器.如果有小伙伴嫌SDR硬件天线看起来太乱.或者电脑没有足够的USB接口也可在局域网搭建SD ...
随机推荐
- C#基础概念 代码样例
C# int与string一起操作时注意 1 int a1= 1; 2 string a2= "2"; 3 Console.WriteLine(a1+a2); 4 Console. ...
- rabbitMQ学习笔记(三) 消息确认与公平调度消费者
从本节开始称Sender为生产者 , Recv为消费者 一.消息确认 为了确保消息一定被消费者处理,rabbitMQ提供了消息确认功能,就是在消费者处理完任务之后,就给服务器一个回馈,服务器就会将 ...
- 定时器SDK
定时器是一切SDK的根本,欲写SDK必先确定定时器,定时器效率的高低决定着SDK函数的效率,下面是我个人写的Linux C++服务器端进程SDK中的定时器,部分参照了ACE和RocketMQ定时器的思 ...
- hdu 4717 The Moving Points(三分)
http://acm.hdu.edu.cn/showproblem.php?pid=4717 大致题意:给出每一个点的坐标以及每一个点移动的速度和方向. 问在那一时刻点集中最远的距离在全部时刻的最远距 ...
- Unreal Engine 4 C++ 为编辑器中Actor创建自己定义图标
有时候我们创建场景的时候,特定的Actor我们想给它一个特定的图标,便于观察.比方这样: 实现起来也非常easy.须要编写C++代码: 我们创建一个Actor,叫AMyActor.它包括一个Sprit ...
- 2015.04.21,外语,读书笔记-《Word Power Made Easy》 12 “如何奉承朋友” SESSION 32
TEASER PREVIEW 如何描述这些人: 很友好.容易相处的人: 不知疲倦的人: 简单.直率..aboveboard([ə'bʌv'bɔ:d] adv. 光明正大地, 率直地 adj. 光明正大 ...
- NEU 1664 传送(最短路基础 堆优化Dijkstra)
题目描述 小A最近喜欢上一款游戏:游戏把地图分了一些区域,这些区域可能会重叠,也可能不会. 游戏中有一项传送技能,改传送技能只能将在同一区域的两个地方使用.小A可以利用区域中重叠部分来实现从某一区域到 ...
- windows安装gnvm安装教程,node多版本解决方案
本文是实现windows下node多版本管理 Win10专业版 一.安装前准备 安装前请卸载node相关的所有东西!!! 二.gnvm下载 gnvm搜索 http://ksria.com/gnvm/ ...
- ROS安装教程
对于ROS的安装,在它的官方网站: http://wiki.ros.org/ROS/Installation 中也有详细说明.但是对于像博主这样先天英语发育不全的人来说,直接看官网还是有点困难的. 所 ...
- c# TextBox
1. text内容全选事件 textBox1.selectAll(); 2.失去与获取焦点事件 textox1.LostFocus += new EventHandler(txt_LostFocus) ...