ubuntu Ros环境halcon的一个程序
这个首先并不是我一边做实验一遍记录的,而是我做完成以后才想起来做个分享的,所以中途遇到的很多问题,并没有来得及记录下来,现在写的这些都是后话了
首先呢!我们不需要在ROS下写halcon的程序也是可以主要就是要添加halcon 的库而已,但是我也是找了很长时间,发现其实是有国外的大牛做的类似与cv_bridge的开发包,
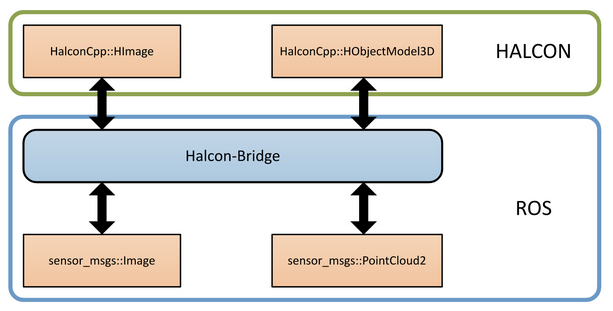
所以也是有halcon_bridge 的开发包 asr_halcon_bridge This package is used to convert between image-messages of the ROS environment and HALCON-images.
Source: git https://github.com/asr-ros/asr_halcon_bridge.git
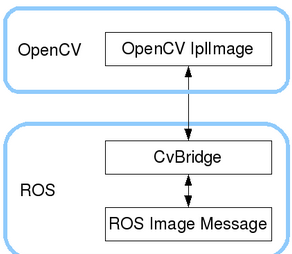
这里这是像cv_bridge一样的功能,就是实现数据格式的转换,这样我们就就可以使用ROS的系统实现opencv halcon PCL (点云库)
三者之间的库函数的使用,这是十分便利 且有很多功能可以直接交叉使用,是多么爽的一件事啊
那么我们下载这个包编译,可能会遇到一些依赖项的问题,这个我就记不得了,但是有一个重要的就是依赖项一般我们都是可以直接安装的
比如ROS-indigo,就直接使用sudo apt-get install ros-indigo-(你想安装的包名)
那如果是一般的库的话我们就像上一篇文章说的那样就是用sudo apt-get install lib(依赖项的名称)-dev,但是如果你找不到,你可以使用
sudo apt-get install lib(依赖项名称)*,(发现没有这边是有一个*的)系统会提示你所有与这个名称相关的依赖项,然后就可以直接补全你想要安装的依赖项即可
可能需要的依赖项 wxWidgets Eigen Boost 等等 反正有好多,就试着用上面的方法试试吧
一个简单的教程如下,如果你对这个Halcon这种方式不熟悉,你可以先用cv_bridge 练手网址:http://wiki.ros.org/cv_bridge
我记得我前面的文章里有写过好像,这里就不在赘述,而且对三维点云的格式转换也是同样适用的,都是有在前面的文章有写过
有兴趣的可以返回过去找一下看一下就可以了
Convert an image:
把ROS中的图片的数据 sensor_msgs::Image 转换为Halcon的图片的格式 HalconCpp::HImage :
HalconImagePtr toHalconCopy(const sensor_msgs::ImageConstPtr& source)
HalconImagePtr toHalconCopy(const sensor_msgs::Image& source);
The return-value is a HalconImagePtr object, which contains a HalconCpp::HImage-Pointer as a member called image.
那么把Halcon的图像的格式 HalconImage转为ROS的格式的:
sensor_msgs::ImagePtr toImageMsg() const;
void toImageMsg(sensor_msgs::Image& ros_image) const;
对于三维点云的格式的转换:
把ROS的三维点云的数据转化为halcon的数据格式,转换的步骤和二维图像是差不多的,主要的函数如下
HalconPointcloudPtr toHalconCopy(const sensor_msgs::PointCloud2ConstPtr& source);
HalconPointcloudPtr toHalconCopy(const sensor_msgs::PointCloud2& source);
to convert a sensor_msgs::PointCloud2 to a HalconCpp::HObjectModel3D (the member in the returned HalconPointcloud is called model).
相反把halcon的数据格式转化为ROS的数据格式,然后这样我们就可以使用点云库(PCL)来处理点云
sensor_msgs::PointCloud2Ptr toPointcloudMsg() const;
void toPointcloudMsg(sensor_msgs::PointCloud2& ros_pointcloud) const;
那么这些我们在后期会有机会的话再写一篇关于这样的文章
比如我们读取单目摄像头的数据,然后转化到halcon下进行处理,这是一个很少有人做的事情,当然我们可以使用kinect1.0
或者kinect 2.0获取点云的数据然后转化到halcon的格式下处理,这个都是可以利用这样方法使用的,
之前安装过kinect 2.0 的驱动以及ROS环境下使用kinect2.0的,网上有很多人教你如何安装kinect2.0 的教程所以就不在赘述
比如我们就显示一下,因为这主要的目的就是要使用Ubuntu环境在halcon下处理三维点云的数据
roslaunch kinect2_bridge kinect2_bridge.launch,开启kinect2.0的驱动
可视化命令如下
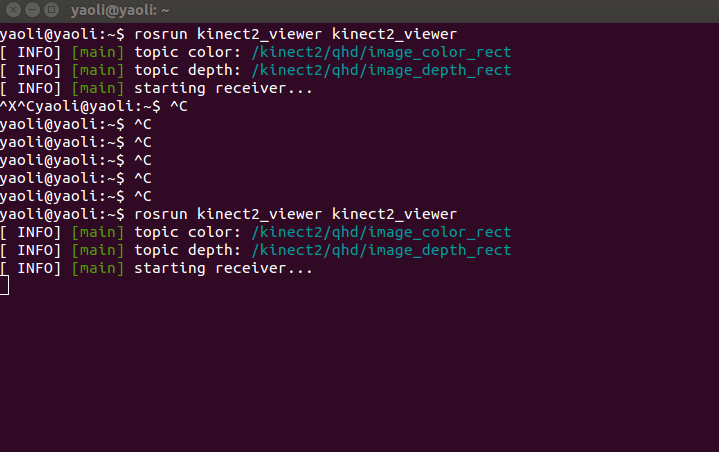
查看节点之间的关系
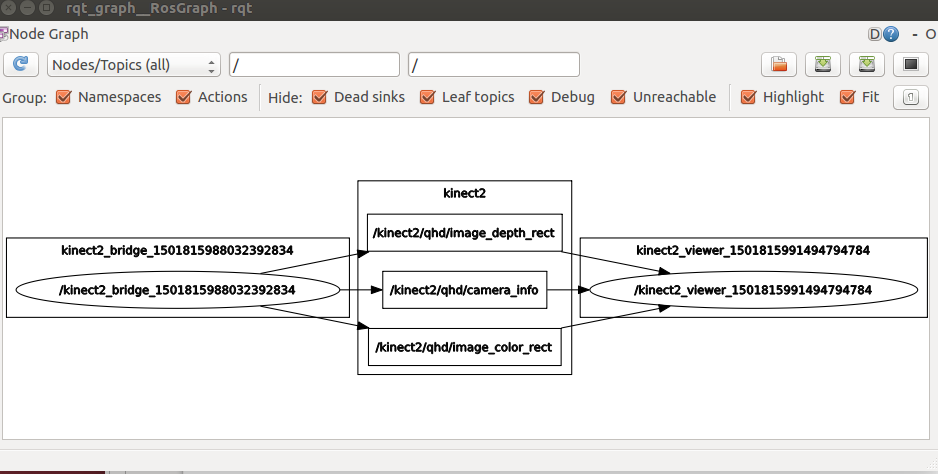
可视化的结果

emmmmmmmmmmmmmmmmmmmmmmmmmmmmmmm似乎好像有点跑题了,好了因为安装的过程中真的有很多问题,但是我没有及时的记录
这只是为了后期我们在使用传感器的时候,通过ROS作为一个桥梁的工具,其实使用halon我们不在ROS下也是可以直接使用的,只要CMakeLists.txt文件写好就可以、
但是使用ROS下使用halcon的分享还是比较少的,接下来我就使用一个简单的例子来说明一下使用halcon的方法、
假设我们已经对ROS熟悉的条件下啊,其中的创建工作空间啊,理解ROS的节点这些问题都不在赘述了
在src文件下建立一个halcon_read.cpp文件,如图
都是以前的笔记,都发布一下吧,具体代码在我的github上
关注微信公众号,加入群聊

ubuntu Ros环境halcon的一个程序的更多相关文章
- Java(1)开发环境配置及第一个程序Hello World
作者:季沐测试笔记 原文地址:https://www.cnblogs.com/testero/p/15201468.html 博客主页:https://www.cnblogs.com/testero ...
- 最简单的???ubuntu 通过crontab定时执行一个程序
crontab在liunx系统中下载,我默认是认为下载安装了的.. crontab貌似只能在liunx系统中存在,如果是windows系统我不知道 创建一个名为jiaoben的文件夹存储sh文件,进入 ...
- SpringBoot环境搭建及第一个程序运行(详细!)
spring boot简介 spring boot框架抛弃了繁琐的xml配置过程,采用大量的默认配置简化我们的开发过程. 所以采用Spring boot可以非常容易和快速地创建基于Spring 框架的 ...
- 使用IDEA写Python之pytest环境搭建及第一个程序编写
一.准备篇 Python环境:3.8.3 开发工具:IDEA,对你没有看错 二.IDEA下安装开发环境 1. python的下载 https://www.python.org/downloads/ P ...
- FFmpeg 开发环境搭建及第一个程序 Hello FFmpeg 编写
1. FFmpeg 的安装 ./configure make make install 默认会将 FFmpeg 安装至 /usr/local 目录下(可通过 configure 使用 "-p ...
- Ubuntu 16.04 ROS环境配置
最近新入职一家公司,是搞智能无人驾驶的,用的操作系统是Ubuntu和ros,之前没接触过ros系统,既然公司用那就必须的学习啊,话不多说先装它一个ros玩玩... 1. Ubuntu 安装 ROS K ...
- Ubuntu图形界面环境下启动应该程序:
1.先说下Ubuntu14.04系统开机紫框的问题: Grub theme:黑色屏幕出现紫色边框 There's a minor typo on the grub theme which produc ...
- scala 入门Eclipse环境搭建及第一个入门经典程序HelloWorld
scala 入门Eclipse环境搭建及第一个入门经典程序HelloWorld 学习了: http://blog.csdn.net/wangmuming/article/details/3407911 ...
- Python(一) 快速配置Python编译环境与第一个py文件程序
1. Python基本语法在此不熬述. 2. 到管网下载Python 3.6.x 版本,与本机匹配的版本,如本机是 win7 64 python-3.6.5-amd64 3. 下载IDE:Python ...
随机推荐
- 1490 ACM 数学
题目:http://acm.hdu.edu.cn/showproblem.php?pid=1490 题意: 给出n*n 的矩阵,选出不同行不同列的n个元素,并求和: 如果所有选法所产生的和相等,则输出 ...
- GPIOLED配置、key、中断NVIC配置
#include "stm32f10x.h" #include "stm32f10x_gpio.h" //内核,(NVIC) #include "mi ...
- [CC-INVENTRY]Arranging the Inventory
[CC-INVENTRY]Arranging the Inventory 题目大意: 有一排长度为\(n(\sum n\le10^6)\)的格子,有些格子是空的,有些格子上有一个箱子. 现在你要用最小 ...
- Safari 中加载 Flash 使用overflow失效的bug
在Flash标签中加入参数:wmode=transparent
- python系统编程(四)
进程池Pool 当需要创建的子进程数量不多时,可以直接利用multiprocessing中的Process动态成生多个进程,但如果是上百甚至上千个目标,手动的去创建进程的工作量巨大,此时就可以用到mu ...
- redis:消息发布与订阅频道
1. 发布与订阅频道 消息发布与订阅像收音机与广播台的关系 1.1. publish channel message 发布频道 语法:publish channel message 作用:发布频道消息 ...
- JSP(7)—EL和JSTL
一.EL表达式: 1.简介:EL全称为Expression Language,原本是JSTL1.0为方便存储数据所定义的语言,当时只能在JSTL标签中 使用,到了JSTL2.0之后,EL已经成为正式纳 ...
- 首席技术官应该考虑的网络安全问题 IT大咖说 - 大咖干货,不再错过
首席技术官应该考虑的网络安全问题 IT大咖说 - 大咖干货,不再错过 http://www.itdks.com/dakalive/detail/5523
- fiddler抓取手机上https数据失败,全部显示“Tunnel to......443”解决办法
与后端数据通信是前端日常开发的重要一环,在与后端接口联调的时候往往需要通过查看后端返回的数据进行调试.如果在PC端,Chrome自带的DevTools就已经足够用了,Network面板可以记录所有网络 ...
- 解决telnet无法连接 Connection refused
telnet协议是TCP/IP协议族中的一员,是Internet远程登陆服务的标准协议和主要方式.它为用户提供了在本地计算机上完成远程主机工作的能力.在终端使用者的电脑上使用telnet程序,用它连接 ...