ubuntu Ros环境halcon的一个程序
这个首先并不是我一边做实验一遍记录的,而是我做完成以后才想起来做个分享的,所以中途遇到的很多问题,并没有来得及记录下来,现在写的这些都是后话了
首先呢!我们不需要在ROS下写halcon的程序也是可以主要就是要添加halcon 的库而已,但是我也是找了很长时间,发现其实是有国外的大牛做的类似与cv_bridge的开发包,
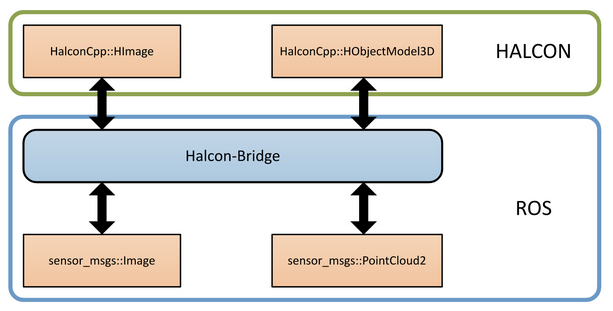
所以也是有halcon_bridge 的开发包 asr_halcon_bridge This package is used to convert between image-messages of the ROS environment and HALCON-images.
Source: git https://github.com/asr-ros/asr_halcon_bridge.git
这里这是像cv_bridge一样的功能,就是实现数据格式的转换,这样我们就就可以使用ROS的系统实现opencv halcon PCL (点云库)
三者之间的库函数的使用,这是十分便利 且有很多功能可以直接交叉使用,是多么爽的一件事啊
那么我们下载这个包编译,可能会遇到一些依赖项的问题,这个我就记不得了,但是有一个重要的就是依赖项一般我们都是可以直接安装的
比如ROS-indigo,就直接使用sudo apt-get install ros-indigo-(你想安装的包名)
那如果是一般的库的话我们就像上一篇文章说的那样就是用sudo apt-get install lib(依赖项的名称)-dev,但是如果你找不到,你可以使用
sudo apt-get install lib(依赖项名称)*,(发现没有这边是有一个*的)系统会提示你所有与这个名称相关的依赖项,然后就可以直接补全你想要安装的依赖项即可
可能需要的依赖项 wxWidgets Eigen Boost 等等 反正有好多,就试着用上面的方法试试吧
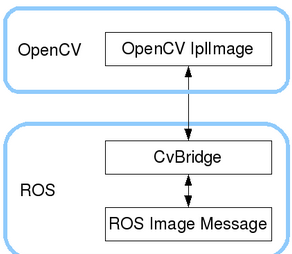
一个简单的教程如下,如果你对这个Halcon这种方式不熟悉,你可以先用cv_bridge 练手网址:http://wiki.ros.org/cv_bridge
我记得我前面的文章里有写过好像,这里就不在赘述,而且对三维点云的格式转换也是同样适用的,都是有在前面的文章有写过
有兴趣的可以返回过去找一下看一下就可以了
Convert an image:
把ROS中的图片的数据 sensor_msgs::Image 转换为Halcon的图片的格式 HalconCpp::HImage :
HalconImagePtr toHalconCopy(const sensor_msgs::ImageConstPtr& source)
HalconImagePtr toHalconCopy(const sensor_msgs::Image& source);
The return-value is a HalconImagePtr object, which contains a HalconCpp::HImage-Pointer as a member called image.
那么把Halcon的图像的格式 HalconImage转为ROS的格式的:
sensor_msgs::ImagePtr toImageMsg() const;
void toImageMsg(sensor_msgs::Image& ros_image) const;
对于三维点云的格式的转换:
把ROS的三维点云的数据转化为halcon的数据格式,转换的步骤和二维图像是差不多的,主要的函数如下
HalconPointcloudPtr toHalconCopy(const sensor_msgs::PointCloud2ConstPtr& source);
HalconPointcloudPtr toHalconCopy(const sensor_msgs::PointCloud2& source);
to convert a sensor_msgs::PointCloud2 to a HalconCpp::HObjectModel3D (the member in the returned HalconPointcloud is called model).
相反把halcon的数据格式转化为ROS的数据格式,然后这样我们就可以使用点云库(PCL)来处理点云
sensor_msgs::PointCloud2Ptr toPointcloudMsg() const;
void toPointcloudMsg(sensor_msgs::PointCloud2& ros_pointcloud) const;
那么这些我们在后期会有机会的话再写一篇关于这样的文章
比如我们读取单目摄像头的数据,然后转化到halcon下进行处理,这是一个很少有人做的事情,当然我们可以使用kinect1.0
或者kinect 2.0获取点云的数据然后转化到halcon的格式下处理,这个都是可以利用这样方法使用的,
之前安装过kinect 2.0 的驱动以及ROS环境下使用kinect2.0的,网上有很多人教你如何安装kinect2.0 的教程所以就不在赘述
比如我们就显示一下,因为这主要的目的就是要使用Ubuntu环境在halcon下处理三维点云的数据
roslaunch kinect2_bridge kinect2_bridge.launch,开启kinect2.0的驱动
可视化命令如下
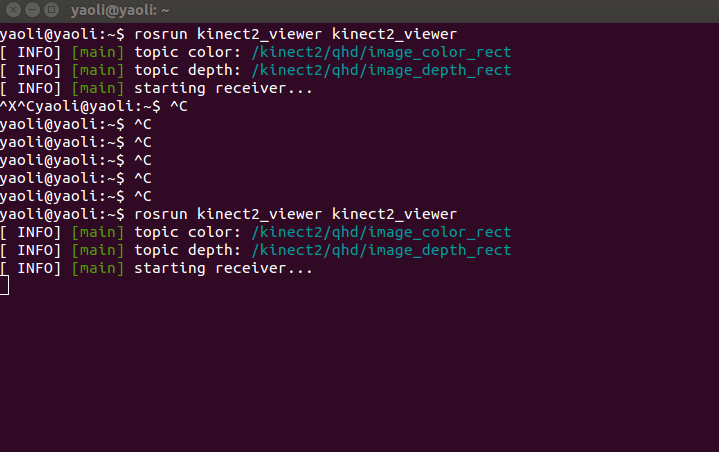
查看节点之间的关系
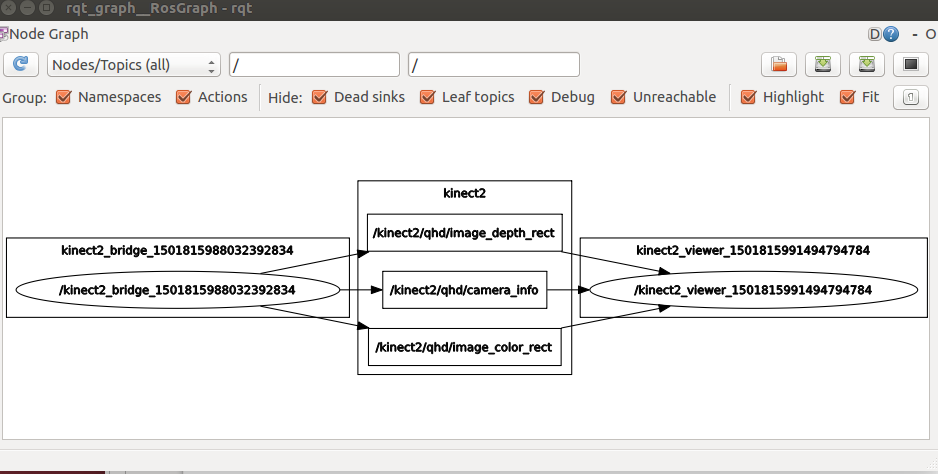
可视化的结果

emmmmmmmmmmmmmmmmmmmmmmmmmmmmmmm似乎好像有点跑题了,好了因为安装的过程中真的有很多问题,但是我没有及时的记录
这只是为了后期我们在使用传感器的时候,通过ROS作为一个桥梁的工具,其实使用halon我们不在ROS下也是可以直接使用的,只要CMakeLists.txt文件写好就可以、
但是使用ROS下使用halcon的分享还是比较少的,接下来我就使用一个简单的例子来说明一下使用halcon的方法、
假设我们已经对ROS熟悉的条件下啊,其中的创建工作空间啊,理解ROS的节点这些问题都不在赘述了
在src文件下建立一个halcon_read.cpp文件,如图
都是以前的笔记,都发布一下吧,具体代码在我的github上
关注微信公众号,加入群聊

ubuntu Ros环境halcon的一个程序的更多相关文章
- Java(1)开发环境配置及第一个程序Hello World
作者:季沐测试笔记 原文地址:https://www.cnblogs.com/testero/p/15201468.html 博客主页:https://www.cnblogs.com/testero ...
- 最简单的???ubuntu 通过crontab定时执行一个程序
crontab在liunx系统中下载,我默认是认为下载安装了的.. crontab貌似只能在liunx系统中存在,如果是windows系统我不知道 创建一个名为jiaoben的文件夹存储sh文件,进入 ...
- SpringBoot环境搭建及第一个程序运行(详细!)
spring boot简介 spring boot框架抛弃了繁琐的xml配置过程,采用大量的默认配置简化我们的开发过程. 所以采用Spring boot可以非常容易和快速地创建基于Spring 框架的 ...
- 使用IDEA写Python之pytest环境搭建及第一个程序编写
一.准备篇 Python环境:3.8.3 开发工具:IDEA,对你没有看错 二.IDEA下安装开发环境 1. python的下载 https://www.python.org/downloads/ P ...
- FFmpeg 开发环境搭建及第一个程序 Hello FFmpeg 编写
1. FFmpeg 的安装 ./configure make make install 默认会将 FFmpeg 安装至 /usr/local 目录下(可通过 configure 使用 "-p ...
- Ubuntu 16.04 ROS环境配置
最近新入职一家公司,是搞智能无人驾驶的,用的操作系统是Ubuntu和ros,之前没接触过ros系统,既然公司用那就必须的学习啊,话不多说先装它一个ros玩玩... 1. Ubuntu 安装 ROS K ...
- Ubuntu图形界面环境下启动应该程序:
1.先说下Ubuntu14.04系统开机紫框的问题: Grub theme:黑色屏幕出现紫色边框 There's a minor typo on the grub theme which produc ...
- scala 入门Eclipse环境搭建及第一个入门经典程序HelloWorld
scala 入门Eclipse环境搭建及第一个入门经典程序HelloWorld 学习了: http://blog.csdn.net/wangmuming/article/details/3407911 ...
- Python(一) 快速配置Python编译环境与第一个py文件程序
1. Python基本语法在此不熬述. 2. 到管网下载Python 3.6.x 版本,与本机匹配的版本,如本机是 win7 64 python-3.6.5-amd64 3. 下载IDE:Python ...
随机推荐
- MySql 5.7.20版本免安装版配置过程
下载地址为: https://dev.mysql.com/downloads/mysql/ 最下面根据自己的操作系统选择合适的型号 下载完以后解压缩到自定义的路径.这里注意的是路径中不要存在中文. 解 ...
- Shooting Contest 射击比赛 [POJ1719] [CEOI1997] [一题多解]
Description(下有中文题意) Welcome to the Annual Byteland Shooting Contest. Each competitor will shoot to a ...
- ES6 原始类型 Symbol
1. 创建Symbol (没有字面格式) Symbol是原始值,没有构造函数 Symbol接受一个可选参数,可以让你添加一段文本描述即将创建的Symbol,这段描述不可用于属性访问,以便于代码阅读和调 ...
- 最全,可直接用的一些正则校验,判断邮箱,手机号码,车牌号,身份证号,网址,账号,密码,ip,去掉html格式,工商税号等。
一些正则校验,判断邮箱,手机号码,车牌号,身份证号,网址,账号,密码,ip,去掉html格式,工商税号等. // 判断邮箱 isValid = [text isValidEmail]; // 判断手机 ...
- 学习Struts--Chap03:struts.xml常用配置(基础)
1.package属性 name:包名 用来唯一的指定一个package.package可以扩展,当一个package扩展自 另一个package时该package会在本身配置的基础上加入扩展的pac ...
- linux 修改时间和时区
linux系统时间有两个,一个是硬件时间,即BIOS时间,就是我们进行CMOS设置时看到的时间,另一个是系统时间,是linux系统Kernel时间.当Linux启动时,系统Kernel会去读取硬件时钟 ...
- 安装oracle11g不能启动图形化界面
问题:安装oracle11g时出现xhost: unable to open display "192.168.2.12:0.0".打不开图形化界面等. 终极解决方法:1.使用X ...
- Using async-await on .net 4
I'm currently starting to create an application that would profit a lot from C# 5's async-await feat ...
- USE " cc.exports.* = value " INSTEAD OF SET GLOBAL VARIABLE"
Cocos2d-x 3.5的lua项目生成后,变成了MVC模式,并且,加入了一个全局变量的检测功能.也就是说,你不小心用了全局变量,他会提示你出错! 比如 local temp = 1 temp = ...
- [Web 前端] 我不再使用React.setState的3个原因
copy from : https://blog.csdn.net/smk108/article/details/85237838 从几个月前开始,我在新开发的React组件中不再使用setState ...