三,ESP8266 SPI(基于Lua脚本语言)
https://www.cnblogs.com/yangfengwu/p/7520260.html
重点是说SPI通信协议,,,,
不要害怕协议因为协议是人规定的,,刚好我也是人......规定的协议既然能成为规范让所有人所接受,那么必然有它的优势和优点,必然值得学习,,
害怕协议的人是因为当初碰到了不懂的老师,他只会告诉你这很难............其实是他不会........
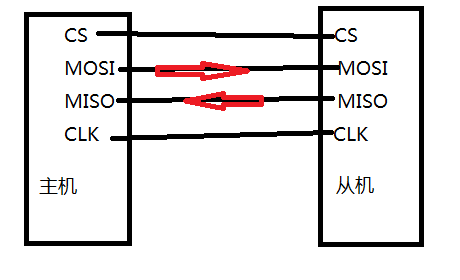
CS : Chip Selection 片选引脚,多个设备时可以用这个引脚选择和哪个设备通信
MOSI : Master Out Slave In 主机输出数据引脚,,,,从机接收数据引脚
MISO : Master In Slave Out 主机接收数据引脚....从机输出数据引脚
CLK : 时钟
还有两个参数----假设有的单片机自带硬件SPI,一定会提供设置下面两个参数,,,当然有的支持SPI通信的芯片也可能涉及这两个参数
CPOL :表示时钟信号(CLK引脚)在空闲时是高电平还是低电平
CPHA :表示数据在时钟信号(CLK)的第几个沿开始数据传输
现在假如说
CPOL = 0 ;//时钟信号(CLK引脚)在空闲时是低电平
CPHA = 0;//数据在时钟信号(CLK)的第1个沿开始数据传输
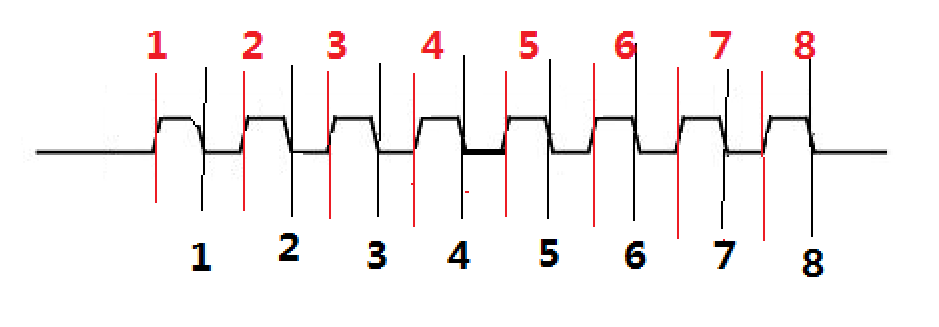
通信的时候先传输高位
假如说 主机发给从机 10101010 从机发给主机 01010101
再假如 主机接收数据存到 MasterData 里面
从机接收数据存到 SlaveData 里面
第一个上升沿 主机的0101010 最高位是 1 所以主机会让MOSI引脚输出高电平
从机的1010101最高位是 0 所以从机会让MISO引脚为低电平
第一个下降沿 主机接收MISO引脚的数据,因为是低电平所以 MasterData= 0000 000;
从机接收MOSI引脚的数据,因为是高电平所以从机SlaveData = 0000 0001;
第二个上升沿 主机左移一位 101010X 最高位是 0 所以主机会让MOSI引脚输出低电平
从机左移一位 010101X 最高位是 1 所以从机会让MISO引脚为高电平
第二个下降沿 主机接收MISO引脚的数据,因为是高电平所以 MasterData= 0000 0001;
从机接收MOSI引脚的数据,因为是低电平所以从机SlaveData = 0000 0010;
就这样8个上升和8个下降沿之后
MasterData = 01010101
SlaveData = 10101010
现在假如说
CPOL = 0 ;//时钟信号(CLK引脚)在空闲时是低电平
CPHA = 1;//数据在时钟信号(CLK)的第2个沿开始数据传输
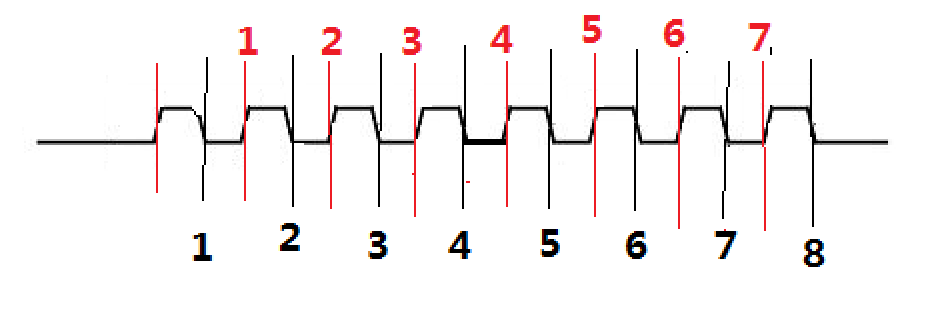
第一个下降沿 主机的0101010 最高位是 1 所以主机会让MOSI引脚输出高电平
从机的1010101最高位是 0 所以从机会让MISO引脚为低电平
第一个上升沿 (注意是标号为1的那个,,,实际上是第二个上升沿)
主机接收MISO引脚的数据,因为是低电平所以 MasterData= 0000 0000;
从机接收MOSI引脚的数据,因为是高电平所以从机SlaveData = 0000 0001;
第二个下降沿 主机左移一位 101010X 最高位是 0 所以主机会让MOSI引脚输出低电平
从机左移一位 010101X 最高位是 1 所以从机会让MISO引脚为高电平
第二个上升沿 主机接收MISO引脚的数据,因为是高电平所以 MasterData= 0000 0001;
从机接收MOSI引脚的数据,因为是低电平所以从机SlaveData = 0000 0010;
第八个下降沿 主机把最后一位0放在了 MOSI引脚输出低电平
从机把最后一位1放在了 MISO引脚输出高电平
其实现在我也有疑惑,,,这样就完了吗??????只把数据放在引脚上就行了吗????然后内部硬件就自动接收了吗????
看一下摩托罗拉的数据手册

难道最后一位会自动的接收?????搞不懂咧咧.....改天自己测试一下,,,让主机工作在
CPOL = 0 ;//时钟信号(CLK引脚)在空闲时是低电平
CPHA = 1;//数据在时钟信号(CLK)的第2个沿开始数据传输
然后让主机发一个字节的数据看看CLK怎样变化的..............然后再尝试手写从机接收....然后知道结果了再来修改这个地方....
其余的两种就不说了
其实说白了就是
CPOL控制在空闲状态下CLK是高电平还是低电平
CPHA控制数据是在第一个沿就开始传输还是在第二个沿
其实呢!!写程序最终还是要看芯片的资料,,,,,
现在看一下ESP8266的SPI
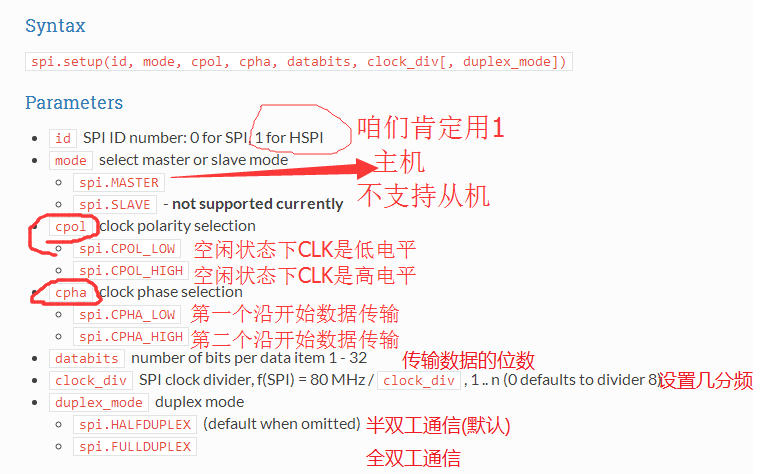
spi.setup(, spi.MASTER, spi.CPOL_HIGH, spi.CPHA_HIGH, , )
用SPI1,主机模式,,空闲状态下Clk为高电平,,第二个沿开始数据传输,8位数据,8分频(10Mhz),默认半双工
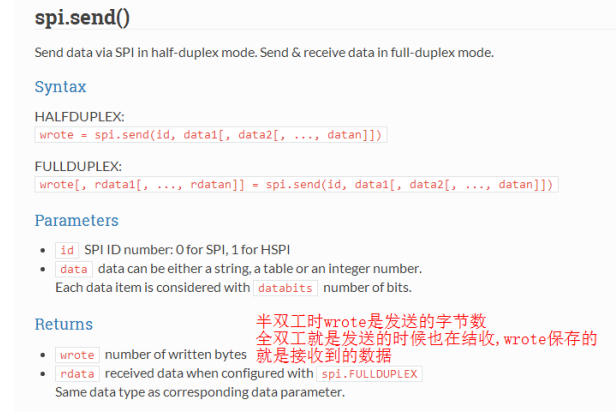
发送数据呢就简单了
比如向从机发送0xaa,0x55,0x02,0x01
spi.send(,0xaa,0x55,0x02,0x01)
接收数据呢还另有个函数
假设需要接收4个数据
ReadData = spi.recv(,,0xaa)
其实就是让CLK产生32个脉冲信号,每8个代表一个字节的数据,,后面的0xaa哈,是在产生脉冲信号的时候MOSI引脚发送的数据,,如果不写
默认发0xFF

对了接收到的数据都是以字符串的形式保存在变量里面,,可能会问我怎么自己解析数据呢
假如说判断是不是接收到0xaa 和0x55
aa = spi.recv(1,2,0xaa)
if aa:byte(1)==0xaa and aa:byte(2)==0x55 then
自己的执行函数
end
大家肯定会说你咋知道要这样写
因为有API文档

还有一点,,我一开始看到过别人这样做过,,所以呢我就知道可以这样用....知识这东西一定要活学活用
http://blog.csdn.net/silno/article/details/72866623?locationNum=10&fps=1

最后说一下和STM32进行SPI通信的一些注意,,,当然是把stm32配置成从机模式,,然后呢其余的设置一定要一样
列如我配置的
void Spi2SlaveInit(void)
{
SPI_InitTypeDef SPI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2, ENABLE );//SPI2时钟使能 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;//CS
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_Init(GPIOB,&GPIO_InitStructure); //GPIO_ResetBits(GPIOB,GPIO_Pin_12); //PB13/14/15上拉 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_Init(GPIOB,&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_Init(GPIOB,&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOB,&GPIO_InitStructure); GPIO_ResetBits(GPIOB,GPIO_Pin_14); //PB13/14/15上拉 GPIO_ResetBits(GPIOB,GPIO_Pin_15); //PB13/14/15上拉 SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Slave;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
// SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_NSS = SPI_NSS_Hard; //如果这里使用硬件模式,从机低电平
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = ;
SPI_Init(SPI2, &SPI_InitStructure); SPI_I2S_ITConfig(SPI2,SPI_I2S_IT_RXNE,ENABLE); SPI_Cmd(SPI2 , ENABLE);
}
要注意
CS引脚在模块刚启动的时候一定是低电平............
再说一点,我的32程序用的中断接收的SPI的数据,然后在中断里面准备发送的数据,,大家这样想
主机的数据发过来一个字节数据之后才进的中断,,所以如果想在中断里面发送数据,,应该在进中断之前准备好数据的第一个字节
假设主机需要读四个字节就会进四次中断
我从机发给主机的数据是0xaa 0x55 0x01 0x02
char table[4] = {0xaa, 0x55, 0x01, 0x02}
在主机发送数据之前
我需要 SPI2->DR = table;
Spi2SendBuff = table+1;
void SPI2_IRQHandler(void)
{
if(SPI_I2S_GetITStatus(SPI2, SPI_I2S_IT_RXNE) == SET)
{
SPI2->DR = *Spi2SendBuff;
Spi2ReadBuff[Spi2ReadCnt] = SPI2->DR; Spi2ReadCnt ++;
Spi2SendBuff ++;
}
}
这样的话来第一个中断的时候我的第一个数据0xaa也发向了主机,然后又准备了第二个数据,,,,,,,四次中断就会把数据发给了主机,,注意指针溢出乱指了一下
这篇文章呢主要是会用ESP8266的SPI就行哈......
https://www.cnblogs.com/yangfengwu/p/7524326.html
三,ESP8266 SPI(基于Lua脚本语言)的更多相关文章
- ESP8266使用详解--基于Lua脚本语言
这些天,,,,今天终于看到了希望,,,天道酬勤 先说实现的功能...让ESP8266连接无线网,然后让它建立服务器,,我的客户端连接上以后,发给客户端发数据模块打印到串口,,往ESP8266串口里发数 ...
- 二,ESP8266 GPIO和SPI和定时器和串口(基于Lua脚本语言)
https://www.cnblogs.com/yangfengwu/p/7514336.html 我们写lua用这个软件 如果点击的时候提示安装,,安装就行,,如果没有提示呢可以,按照下面链接的提示 ...
- 一,ESP8266下载和刷固件(基于Lua脚本语言)
用自己的小板测试...... 安排上呢 一, ESP8266下载和刷固件(Lua开发----体验一下lua开发的魅力所在) 二, 控制一个灯亮灭 三, TCP服务器 四, TCP客户端 五, UDP ...
- 八,ESP8266 文件保存数据(基于Lua脚本语言)
https://www.cnblogs.com/yangfengwu/p/7533845.html 应该是LUA介绍8266的最后一篇,,,,,,下回是直接用SDK,,然后再列个12345...... ...
- 五,ESP8266 TCP服务器多连接(基于Lua脚本语言)
https://www.cnblogs.com/yangfengwu/p/7524326.html 一些时间去准备朋友的元器件了... 接着写,,争取今天写完所有的文章,,因为答应了朋友下周5之前要做 ...
- 六,ESP8266 TCP Client(基于Lua脚本语言)
今天不知道是不是让我姐挺失望.......很多时候都不知道自己努力的方向对不对,,以后能不能带给家人最美好的期盼...... Init.lua 没啥改变,,就改了一下加载Client.lua gpio ...
- 四,ESP8266 TCP服务器(基于Lua脚本语言)
我要赶时间赶紧写完所有的内容....朋友的东西答应的还没做完呢!!!!!!!没想到又来了新的事情,,....... 配置模块作为TCP服务器然后呢咱们连接服务器发指令控制LED亮灭 控制的指令呢咱就配 ...
- 九,ESP8266 判断是断电上电(强制硬件复位)之后运行的内部程序还是内部软件复位之后运行的程序(基于Lua脚本语言)
现在我有一个需求,WIFI模块控制一个继电器,我要做的是如果内部程序跑乱了,造成了内部程序复位重启,那么控制继电器的状态不能改变 如果是设备断电了,然后又来电了,我需要的是继电器一定要是断开才好.不能 ...
- 七,ESP8266-UDP(基于Lua脚本语言)
https://www.cnblogs.com/yangfengwu/p/7533302.html 那天朋友问我为什么有UDP Sever 和 UDP Client ,,我说:每个人想的不一样,设 ...
随机推荐
- Tracing 在PeopleSoft 程序中怎么开启
本文介绍一些常用的跟踪方法在Applications,Application Engine,PeopleSoft,Integration Broker,Cobol中. 1.Application En ...
- SD从零开始47-50, 装运成本基础、控制、结算, 信用/风险管理概述
[原创] SD从零开始47 装运成本基础 详细的装运成本处理Shipment Cost Processing in Detail 装运成本计算和装运成本结算可用于内向和外向交货: 装运成本记录在一张新 ...
- Loadrunner打开VU时候报错Critical error(cannot use Exceptiondialog)
打开Loadrunner打开VU时候报错Critical error(cannot use Exceptiondialog) 卸载后,删掉注册表,重新安装,打开还是这样 怎么办呢 我男票告诉我,从开始 ...
- 2016年,谁是最受欢迎的 Java EE 服务器?
[编者按]本文作者为性能监控工具 Plumbr 创始人 Nikita Salnikov-tarnovski,主要介绍2016年度最广为使用的 Java EE 容器及其排名变化情况.本文系国内 ITOM ...
- python subprocess pipe 实时输出日志
* test11.py import time print "1" time.sleep(2) print "1" time.sleep(2) print &q ...
- EVE Online Third Party Development
第一部分:price_history表 # 建表语句 CREATE TABLE IF NOT EXISTS `price_history` ( `regionID` INT NOT NULL, `ty ...
- Microsoft SQL 关系数据库的使用指南
Microsoft SQL 关系数据库的使用指南 https://docs.microsoft.com/zh-cn/sql/relational-databases/database-features
- 从零起步做到Linux运维经理,你必须管好的23个细节
不想成为将军的士兵,不是好士兵-拿破仑 如何成为运维经理?成为运维经理需要什么样的能力?我想很多运维工程师都会有这样的思考和问题. 如何成为运维经理.一般来说,运维经理大概有两种出身,一种是从底层最基 ...
- MySQL并发相关的参数
1.max_connections 这个参数可提高并发连接数,即允许连接到MySQL数据库的最大数量. 如果实验MySQL过程中遇到too many connections等问题,可提高这个值,此外我 ...
- sysbench压力工具报错:
[root@ sysbench-]# /usr/local/sysbench/bin/sysbench --version : cannot open shared object file: No s ...