opencv学习笔记(八)IplImage* 访问图像像素的值
opencv2.1版本之前使用IplImage*数据结构来表示图像,2.1之后的版本使用图像容器Mat来存储。IplImage结构体如下所示。
typedef struct _IplImage
{
int nSize; /* IplImage大小 */
int ID; /* 版本 (=0)*/
int nChannels; /* 大多数OPENCV函数支持1,2,3 或 4 个通道 */
int alphaChannel; /* 被OpenCV忽略 */
int depth; /* 像素的位深度: IPL_DEPTH_8U, IPL_DEPTH_8S, IPL_DEPTH_16U,
IPL_DEPTH_16S, IPL_DEPTH_32S, IPL_DEPTH_32F and IPL_DEPTH_64F 可支持 */
char colorModel[]; /* 被OpenCV忽略 */
char channelSeq[]; /* 同上 */
int dataOrder; /* 0 - 交叉存取颜色通道, 1 - 分开的颜色通道.
cvCreateImage只能创建交叉存取图像 */
int origin; /* 0 - 顶—左结构,
1 - 底—左结构 (Windows bitmaps 风格) */
int align; /* 图像行排列 (4 or 8). OpenCV 忽略它,使用 widthStep 代替 */
int width; /* 图像宽像素数 */
int height; /* 图像高像素数*/
struct _IplROI *roi;/* 图像感兴趣区域. 当该值非空只对该区域进行处理 */
struct _IplImage *maskROI; /* 在 OpenCV中必须置NULL */
void *imageId; /* 同上*/
struct _IplTileInfo *tileInfo; /*同上*/
int imageSize; /* 图像数据大小(在交叉存取格式下imageSize=image->height*image->widthStep),单位字节*/
char *imageData; /* 指向排列的图像数据 */
int widthStep; /* 排列的图像行大小,以字节为单位 */
int BorderMode[]; /* 边际结束模式, 被OpenCV忽略 */
int BorderConst[]; /* 同上 */
char *imageDataOrigin; /* 指针指向一个不同的图像数据结构(不是必须排列的),是为了纠正图像内存分配准备的 */
}
IplImage;
1、使用指针遍历图像像素
(1)单通道字节型图像像素访问
/*
@author:CodingMengmeng
@theme:Read the image pixel values
@time:2017-3-16 11:27:31
@blog:http://www.cnblogs.com/codingmengmeng/
*/
#include <cv.h>
#include <highgui.h>
using namespace std;
using namespace cv;
int main(void)
{
IplImage* imgSrc = cvLoadImage("./inputData\\shuke1.jpg",);
uchar* pixel = new uchar;
for (int i = ; i < imgSrc->height; i++)
{
for (int j = ; j < imgSrc->width; j++)
{
pixel = (uchar*)(imgSrc->imageData + i*imgSrc->widthStep+j);
cout << "pixel=" <<(*pixel)+<< endl;//+0隐式转换为整型,否则会打印出字符
}
}
delete pixel;
return ;
}
输出结果是0-255灰度级的灰度值。
其中(uchar*)(imgSrc->imageData + i*imgSrc->widthStep+j)的具体含义:
(a)imgSrc->imageData指向图像第一行的首地址,i是指当前像素点所在的行,widthStep是指图像每行所占的字节数;所以imgSrc->imageData + i*imgSrc->widthStep表示该像素点所在行的首地址;j表示当前像素点所在列,所以imgSrc->imageData + i*imgSrc->widthStep+j即表示该像素点的地址。而因为IplImage->ImageData 的默认类型是 char 类型,所以再对图像像素值进行操作时,要使用强制类型转换为unsigned char,再对其进行处理。否则,图像像素值中,会有负值出现。
(b)widthStep表示存储一行像素需要的字节数
一个m*n的单通道字节型图像,其imageData排列如下:
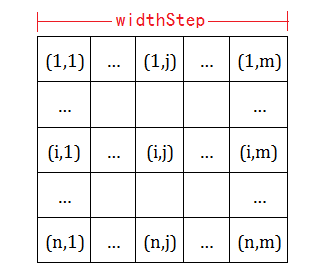
因为opencv分配的内存是按4字节对齐的,所以widthStep必须是4的倍数,如果8U图像宽度为3,那么widthStep是4,加一个字节补齐。这个图像的一行需要4个字节,只使用前3个,最后一个空在那儿不用。也就是一个宽3高3的图像的imageData数据大小为4*3=12字节。
(2)三通道字节型图像像素访问
多通道字节型图像的imageData排列如下:
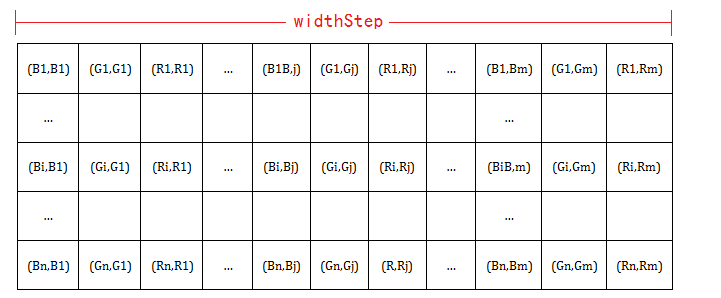
其中(Bi,Bj)(Gi,Gj)(Ri,Rj)表示图像(i,j)处BGR分量的值。
/*
//@author:CodingMengmeng
//@theme:Read the image pixel values
//@time:2017-3-16 11:59:17
//@blog:http://www.cnblogs.com/codingmengmeng/
*/
#include <cv.h>
#include <highgui.h>
using namespace std;
using namespace cv;
int main(void)
{
IplImage* imgSrc = cvLoadImage("./inputData\\shuke1.jpg");
uchar* b_pixel = new uchar;
uchar* g_pixel = new uchar;
uchar* r_pixel = new uchar;
for (int i = ; i < imgSrc->height; i++)
{
for (int j = ; j < imgSrc->width; j++)
{
b_pixel = (uchar*)(imgSrc->imageData + i*imgSrc->widthStep + (j*imgSrc->nChannels + ));
g_pixel = (uchar*)(imgSrc->imageData + i*imgSrc->widthStep + (j*imgSrc->nChannels + ));
r_pixel=(uchar*)(imgSrc->imageData + i*imgSrc->widthStep + (j*imgSrc->nChannels + ));
cout << "b_pixel=" << *b_pixel+ << endl;
cout << "g_pixel=" << *g_pixel+ << endl;
cout << "r_pixel=" << *r_pixel+ << endl;
cout << "/********************************************/" << endl;
}
}
delete b_pixel;
delete g_pixel;
delete r_pixel;
return ;
}
运行结果:

2、使用cvGet2D()函数访问
cvGet*D系列函数可以用来返回特定位置的数组元素(一般使用cvGet2D),原型如下:
CvScalar cvGet1D( const CvArr* arr, int idx0 );
CvScalar cvGet2D( const CvArr* arr, int idx0, int idx1 );
CvScalar cvGet3D( const CvArr* arr, int idx0, int idx1, int idx2 );
CvScalar cvGetND( const CvArr* arr, int* idx );
(1)单通道图像像素访问
/*
@author:CodingMengmeng
@theme:Read the image pixel values
@time:2017-3-16 15:12:57
@blog:http://www.cnblogs.com/codingmengmeng/
*/
#include <cv.h>
#include <highgui.h>
using namespace std;
using namespace cv;
int main(void)
{
IplImage* imgSrc = cvLoadImage("./inputData\\shuke1.jpg",);
CvScalar pixel_v;
/*
CvScalar是一个可以用来存放4个double数值的数组
一般用来存放像素值(不一定是灰度值哦)的,最多可以存放4个通道的
如何赋值:
a) 存放单通道图像中像素:cvScalar(255);
b) 存放三通道图像中像素:cvScalar(255,255,255);
c)只使用第一个通道,val[0]=val0;等同于cvScalar(val0,0,0,0);
*/
for (int i = ; i < imgSrc->height; i++)
{
for (int j = ; j < imgSrc->width; j++)
{
pixel_v = cvGet2D(imgSrc, i, j);
cout << "pixel=" << pixel_v.val[] << endl;
}
}
return ;
}
注意:
对于图像中的某一像素点 P(x, y), 在我们正常的坐标系中,x代表其横坐标,y代表其纵坐标;而在opencv的函数cvGet2D()的函数原型是 : CvScalar cvGet2D (const CvArr * arr, int idx0, int idx1); 函数返回的是一个CvScalar 容器,其参数中也有两个方向的坐标,但跟我们平常习惯的坐标不一样的是,idx0代表是的行,即高度,对应于我们平常坐标系的y, idx1代表的是列,即宽度,对应于我们平常坐标系的x使用时请千万别弄反,否则容易出现溢出引发异常。
(2)多通道字节型/浮点型图像像素访问
/*
@author:CodingMengmeng
@theme:Read the image pixel values
@time:2017-3-16 15:18:29
@blog:http://www.cnblogs.com/codingmengmeng/
*/
#include <cv.h>
#include <highgui.h>
using namespace std;
using namespace cv;
int main(void)
{
IplImage* imgSrc = cvLoadImage("./inputData\\shuke1.jpg");
CvScalar pixel_v;
/*
CvScalar是一个可以用来存放4个double数值的数组
一般用来存放像素值(不一定是灰度值哦)的,最多可以存放4个通道的
如何赋值:
a) 存放单通道图像中像素:cvScalar(255);
b) 存放三通道图像中像素:cvScalar(255,255,255);
c)只使用第一个通道,val[0]=val0;等同于cvScalar(val0,0,0,0);
*/
for (int i = ; i < imgSrc->height; i++)
{
for (int j = ; j < imgSrc->width; j++)
{
pixel_v = cvGet2D(imgSrc, i, j);
cout << "b_pixel=" << pixel_v.val[] << endl;//B分量
cout << "g_pixel=" << pixel_v.val[] << endl;//G分量
cout << "r_pixel=" << pixel_v.val[] << endl;//R分量
cout << "/********************************************/" << endl;
}
}
return ;
}
运行结果:

opencv学习笔记(八)IplImage* 访问图像像素的值的更多相关文章
- 【opencv学习笔记七】访问图像中的像素与图像亮度对比度调整
今天我们来看一下如何访问图像的像素,以及如何改变图像的亮度与对比度. 在之前我们先来看一下图像矩阵数据的排列方式.我们以一个简单的矩阵来说明: 对单通道图像排列如下: 对于双通道图像排列如下: 那么对 ...
- 【opencv学习笔记八】创建TrackBar轨迹条
createTrackbar这个函数我们以后会经常用到,它创建一个可以调整数值的轨迹条,并将轨迹条附加到指定的窗口上,使用起来很方便.首先大家要记住,它往往会和一个回调函数配合起来使用.先看下他的函数 ...
- (转) OpenCV学习笔记大集锦 与 图像视觉博客资源2之MIT斯坦福CMU
首页 视界智尚 算法技术 每日技术 来打我呀 注册 OpenCV学习笔记大集锦 整理了我所了解的有关OpenCV的学习笔记.原理分析.使用例程等相关的博文.排序不分先后,随机整理的 ...
- opencv学习笔记(九)Mat 访问图像像素的值
对图像的像素进行访问,可以实现空间增强,反色,大部分图像特效系列都是基于像素操作的.图像容器Mat是一个矩阵的形式,一般情况下是二维的.单通道灰度图一般存放的是<uchar>类型,其数据存 ...
- OpenCV学习笔记(七) 图像金字塔 阈值 边界
转自: OpenCV 教程 使用 图像金字塔 进行缩放 图像金字塔是视觉运用中广泛采用的一项技术.一个图像金字塔是一系列图像的集合 - 所有图像来源于同一张原始图像 - 通过梯次向下采样获得,直到达到 ...
- OpenCV学习笔记:如何扫描图像、利用查找表和计时
目的 我们将探索以下问题的答案: 如何遍历图像中的每一个像素? OpenCV的矩阵值是如何存储的? 如何测试我们所实现算法的性能? 查找表是什么?为什么要用它? 测试用例 这里我们测试的,是一种简单的 ...
- OpenCV学习笔记(4)——图像上的算术运算
学习图像上的算术运算,加法,减法,位运算等 1.图像加法 使用cv2.add()将两幅图像进行加法运算,也可以用numpy运算,直接img+img1.两幅图像的大小和类型必须一致,或者第二个图像可以是 ...
- OpenCV 学习笔记(13)图像转换成视频
关键 1参数里的分辨率是图像本身的分辨率,而不是指定生成的视频分辨率.如果要修改分辨率,要么后期软件处理,要么读图的时候resize 2要正常退出,不要强制退出. 3生成的只能是avi格式. #inc ...
- OpenCV学习笔记八:opencv_photo模块
一,简介: 该库用于数码照片的处理,处于发展中,目前只包含如下算法: //! restores the damaged image areas using one of the available i ...
随机推荐
- 贝叶斯先验解释l1正则和l2正则区别
这里讨论机器学习中L1正则和L2正则的区别. 在线性回归中我们最终的loss function如下: 那么如果我们为w增加一个高斯先验,假设这个先验分布是协方差为 的零均值高斯先验.我们在进行最大似然 ...
- #Leetcode# 725. Split Linked List in Parts
https://leetcode.com/problems/split-linked-list-in-parts/ Given a (singly) linked list with head nod ...
- Semantic Versioning Specification & 语义化版本
Semantic Versioning Specification & 语义化版本 Semantic Versioning Specification http://semver.org 16 ...
- python 十进制整数转换为任意进制(36以内)
def baseN(num, b): return ((num == 0) and "0") or (baseN(num // b, b).lstrip("0" ...
- Dos命令大全完整版
DOS(磁盘操作系统)命令,是DOS操作系统的命令,是一种面向磁盘的操作命令,主要包括目录操作类命令.磁盘操作类命令.文件操作类命令和其它命令. 使用技巧 DOS命令不区分大小写,比如C盘的Progr ...
- Exploring Pyramids UVALive - 3516 (记忆化DP)
题意:给定一个序列 问有多少棵树与之对应 题目连接:https://cn.vjudge.net/problem/UVALive-3516 对于这一序列 分两种2情况 当前分支 和 其它分支 用df ...
- 特殊符号 UNICODE编码
特殊符号 UNICODE编码 =================== Start ⇠ 箭头类 符号 UNICODE 符号 UNICODE HTML JS CSS HTML JS CSS ⇠ & ...
- MT【101】分配问题举例若干
先拿MT[100]的图表镇楼. 举几个例子: [1]52张纸牌分发给4人,每人13张,问每人手中有一张小2的概率? 分析:第一步每人分一张小2,有4!种,然后48张牌平均分成4组有$\frac{48! ...
- Ansible批量在远程主机执行命令
Ansible直接执行远程命令,不用ssh登陆交互执行. 如下: ansible all -i 192.168.199.180, -m shell -a "ifconfig" -u ...
- springboot通过ssh通道连接mysql数据库
navicat可以通过ssh通道连接mysql数据库,那java中如何实现了,springboot又该怎样集成呢? 1.添加包 <dependency> <groupId>co ...