VINS 估计器之结构初始化
为什么要初始化
非线性VINS估计器的性能对于初始的速度,尺度,重力向量,空间点3D位置,以及外参等非常敏感。在很多场合中,能做到相机和IMU即插即用,线上自动校准与初始化,将会给用户带来极大的方便性。VINS里面分四步进行,第一个就是上次讲的旋转外参校准,第二个就是找到某帧作为系统初始化原点,计算3D地图点,第三就是将相机坐标系转到IMU坐标系中,第四就是相机与IMU对齐,包括IMU零偏初始化,速度,重力向量,尺度初始化
初始化系统原点与转换到IMU坐标系
bool Estimator::initialStructure()
{
TicToc t_sfm;
//check imu observibility, 通过协方差检测IMU的可观测性
{
map<double, ImageFrame>::iterator frame_it;
Vector3d sum_g;
for (frame_it = all_image_frame.begin(), frame_it++; frame_it != all_image_frame.end(); frame_it++)
{
double dt = frame_it->second.pre_integration->sum_dt;
Vector3d tmp_g = frame_it->second.pre_integration->delta_v / dt;
sum_g += tmp_g;
}
Vector3d aver_g;
aver_g = sum_g * 1.0 / ((int)all_image_frame.size() - 1);
double var = 0;
for (frame_it = all_image_frame.begin(), frame_it++; frame_it != all_image_frame.end(); frame_it++)
{
double dt = frame_it->second.pre_integration->sum_dt;
Vector3d tmp_g = frame_it->second.pre_integration->delta_v / dt;
var += (tmp_g - aver_g).transpose() * (tmp_g - aver_g);
//cout << "frame g " << tmp_g.transpose() << endl;
}
var = sqrt(var / ((int)all_image_frame.size() - 1));
//ROS_WARN("IMU variation %f!", var);
if(var < 0.25)
{
ROS_INFO("IMU excitation not enouth!");
//return false;
}
}
// global sfm 准备
Quaterniond Q[frame_count + 1];
Vector3d T[frame_count + 1];
map<int, Vector3d> sfm_tracked_points;
vector<SFMFeature> sfm_f;
for (auto &it_per_id : f_manager.feature)
{
int imu_j = it_per_id.start_frame - 1;
SFMFeature tmp_feature;
tmp_feature.state = false;
tmp_feature.id = it_per_id.feature_id;
for (auto &it_per_frame : it_per_id.feature_per_frame)
{
imu_j++;
Vector3d pts_j = it_per_frame.point;
tmp_feature.observation.push_back(make_pair(imu_j, Eigen::Vector2d{pts_j.x(), pts_j.y()}));
}
sfm_f.push_back(tmp_feature);
}
//在窗口内选择跟最后一帧视差最大的帧,利用五点法计算相对旋转和平移量
Matrix3d relative_R;
Vector3d relative_T;
int l;
if (!relativePose(relative_R, relative_T, l))
{
ROS_INFO("Not enough features or parallax; Move device around");
return false;
}
// 为了更方便理解,把relativePose 函数取了出来
| ----------------------------------------------------------------------------------------------------------
| bool Estimator::relativePose(Matrix3d &relative_R, Vector3d &relative_T, int &l)
| {
| // find previous frame which contians enough correspondance and parallex with newest frame,循环找出和最新帧视差最大的历史帧
| for (int i = 0; i < WINDOW_SIZE; i++)
| {
| vector<pair<Vector3d, Vector3d>> corres;
| corres = f_manager.getCorresponding(i, WINDOW_SIZE);
| if (corres.size() > 20)
| {
| double sum_parallax = 0;
| double average_parallax;
| for (int j = 0; j < int(corres.size()); j++)
| {
| Vector2d pts_0(corres[j].first(0), corres[j].first(1));
| Vector2d pts_1(corres[j].second(0), corres[j].second(1));
| double parallax = (pts_0 - pts_1).norm();
| sum_parallax = sum_parallax + parallax;
| }
| average_parallax = 1.0 * sum_parallax / int(corres.size());
| // 找到后就可以利用五点法计算,如果计算失败就继续循环
| if(average_parallax * 460 > 30 && m_estimator.solveRelativeRT(corres, relative_R, relative_T))
| {
| l = i;
| ROS_DEBUG("average_parallax %f choose l %d and newest frame to triangulate the whole structure", average_parallax * 460, l);
| return true;
| }
| }
| }
| return false;
| }
| // 核心的五点法,也是求本质矩阵
| bool MotionEstimator::solveRelativeRT(const vector<pair<Vector3d, Vector3d>> &corres, Matrix3d &Rotation, Vector3d &Translation)
| {
| if (corres.size() >= 15)
| {
| vector<cv::Point2f> ll, rr;
| for (int i = 0; i < int(corres.size()); i++)
| {
| ll.push_back(cv::Point2f(corres[i].first(0), corres[i].first(1)));
| rr.push_back(cv::Point2f(corres[i].second(0), corres[i].second(1)));
| }
| cv::Mat mask;
| cv::Mat E = cv::findFundamentalMat(ll, rr, cv::FM_RANSAC, 0.3 / 460, 0.99, mask);
| cv::Mat cameraMatrix = (cv::Mat_<double>(3, 3) << 1, 0, 0, 0, 1, 0, 0, 0, 1);
| cv::Mat rot, trans;
| // recoverPose内用了一些复杂的条件判断如何选取R和T,但是其用了单位矩阵作为cameraMatrix,feature_tracker_node在处理图像的是已经把图像坐标转为归一化的相机坐标了,并且进行了去畸变,所以之后的重投影部分只需要外参,不再需要内参了.
| int inlier_cnt = cv::recoverPose(E, ll, rr, cameraMatrix, rot, trans, mask);
| //cout << "inlier_cnt " << inlier_cnt << endl;
|
| Eigen::Matrix3d R;
| Eigen::Vector3d T;
| for (int i = 0; i < 3; i++)
| {
| T(i) = trans.at<double>(i, 0);
| for (int j = 0; j < 3; j++)
| R(i, j) = rot.at<double>(i, j);
| }
|
| Rotation = R.transpose();
| Translation = -R.transpose() * T;
| if(inlier_cnt > 12)
| return true;
| else
| return false;
| }
| return false;
| }
| ----------------------------------------------------------------------------------------------------------
GlobalSFM sfm;
/* sfm.construct 函数本身就很巨大,里面很多步骤,代码就不贴了,大致如下:
1. 三角化l 帧与frame_num - 1帧,得到一些地图点。
2. 通过这些地图点,利用pnp的方法计算l+1, l+2, l+3, …… frame_num-2 相对于l的位姿。而且每计算一帧,就会与frame_num - 1帧进行三角化,得出更多地图点
3. 三角化l+1, l+2 …… frame_num-2帧与l帧
4. 对l-1, l-2, l-3 等帧与sfm_f的特征点队列进行pnp求解,得出相对于l的位姿,并三角化其与l帧。
5. 三角化剩余的点
6. ceres全局BA优化,最小化3d投影误差
*/
if(!sfm.construct(frame_count + 1, Q, T, l,
relative_R, relative_T,
sfm_f, sfm_tracked_points))
{
ROS_DEBUG("global SFM failed!");
marginalization_flag = MARGIN_OLD;
return false;
}
//solve pnp for all frame,因为有continue存在,怎么会solve all,感觉只是不满足时间戳相等的才pnp求解
map<double, ImageFrame>::iterator frame_it;
map<int, Vector3d>::iterator it;
frame_it = all_image_frame.begin( );
for (int i = 0; frame_it != all_image_frame.end( ); frame_it++)
{
// provide initial guess
cv::Mat r, rvec, t, D, tmp_r;
if((frame_it->first) == Headers[i].stamp.toSec())
{
frame_it->second.is_key_frame = true;
frame_it->second.R = Q[i].toRotationMatrix() * RIC[0].transpose();
frame_it->second.T = T[i];
i++;
continue;
}
if((frame_it->first) > Headers[i].stamp.toSec())
{
i++;
}
Matrix3d R_inital = (Q[i].inverse()).toRotationMatrix();
Vector3d P_inital = - R_inital * T[i];
cv::eigen2cv(R_inital, tmp_r);
cv::Rodrigues(tmp_r, rvec);
cv::eigen2cv(P_inital, t);
frame_it->second.is_key_frame = false;
vector<cv::Point3f> pts_3_vector;
vector<cv::Point2f> pts_2_vector;
for (auto &id_pts : frame_it->second.points)
{
int feature_id = id_pts.first;
for (auto &i_p : id_pts.second)
{
it = sfm_tracked_points.find(feature_id);
if(it != sfm_tracked_points.end())
{
Vector3d world_pts = it->second;
cv::Point3f pts_3(world_pts(0), world_pts(1), world_pts(2));
pts_3_vector.push_back(pts_3);
Vector2d img_pts = i_p.second.head<2>();
cv::Point2f pts_2(img_pts(0), img_pts(1));
pts_2_vector.push_back(pts_2);
}
}
}
cv::Mat K = (cv::Mat_<double>(3, 3) << 1, 0, 0, 0, 1, 0, 0, 0, 1);
if(pts_3_vector.size() < 6)
{
cout << "pts_3_vector size " << pts_3_vector.size() << endl;
ROS_DEBUG("Not enough points for solve pnp !");
return false;
}
if (! cv::solvePnP(pts_3_vector, pts_2_vector, K, D, rvec, t, 1))
{
ROS_DEBUG("solve pnp fail!");
return false;
}
cv::Rodrigues(rvec, r);
MatrixXd R_pnp,tmp_R_pnp;
cv::cv2eigen(r, tmp_R_pnp);
R_pnp = tmp_R_pnp.transpose();
MatrixXd T_pnp;
cv::cv2eigen(t, T_pnp);
T_pnp = R_pnp * (-T_pnp);
frame_it->second.R = R_pnp * RIC[0].transpose();
frame_it->second.T = T_pnp;
}
if (visualInitialAlign())
return true;
else
{
ROS_INFO("misalign visual structure with IMU");
return false;
}
}
相机与IMU对齐
bool Estimator::visualInitialAlign()
{
TicToc t_g;
VectorXd x;
/*里面包含
1. solveGyroscopeBias()零偏初始化: 在滑动窗口中,每两帧之间的相对旋转与IMU预积分产生的旋转进行最小二乘法优化,用ldlt求解
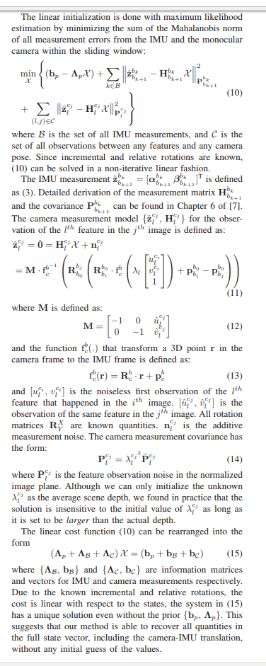
2. LinearAlignment() 尺度初始化:由于在视觉初始化SFM的过程中,将其中位姿变化较大的两帧中使用E矩阵求解出来旋转和位移,后续的PnP和三角化都是在这个尺度下完成的。所以当前的尺度与IMU测量出来的真实世界尺度肯定不是一致的,所以需要这里进行对齐。这里对齐的方法主要是通过在滑动窗口中每两帧之间的位置和速度与IMU预积分出来的位置和速度组成一个最小二乘法的形式,然后求解出来
3. RefineGravity()重力向量优化:进一步细化重力加速度,提高估计值的精度,形式与LinearAlignment()是一致的,只是将g改为g⋅ĝ +w1b1+w2b2
2和3的公式相对难懂,请参考下面图片
*/
bool result = VisualIMUAlignment(all_image_frame, Bgs, g, x);
if(!result)
{
ROS_DEBUG("solve g failed!");
return false;
}
// change state
for (int i = 0; i <= frame_count; i++)
{
Matrix3d Ri = all_image_frame[Headers[i].stamp.toSec()].R;
Vector3d Pi = all_image_frame[Headers[i].stamp.toSec()].T;
Ps[i] = Pi;
Rs[i] = Ri;
all_image_frame[Headers[i].stamp.toSec()].is_key_frame = true;
}
VectorXd dep = f_manager.getDepthVector();
for (int i = 0; i < dep.size(); i++)
dep[i] = -1;
f_manager.clearDepth(dep);
//triangulat on cam pose , no tic三角化特征点,
Vector3d TIC_TMP[NUM_OF_CAM];
for(int i = 0; i < NUM_OF_CAM; i++)
TIC_TMP[i].setZero();
ric[0] = RIC[0];
f_manager.setRic(ric);
f_manager.triangulate(Ps, &(TIC_TMP[0]), &(RIC[0]));
//更新相机速度,位置和旋转量(通过精确求解的尺度,重力向量)
double s = (x.tail<1>())(0);
for (int i = 0; i <= WINDOW_SIZE; i++)
{
pre_integrations[i]->repropagate(Vector3d::Zero(), Bgs[i]);
}
for (int i = frame_count; i >= 0; i--)
Ps[i] = s * Ps[i] - Rs[i] * TIC[0] - (s * Ps[0] - Rs[0] * TIC[0]);
int kv = -1;
map<double, ImageFrame>::iterator frame_i;
for (frame_i = all_image_frame.begin(); frame_i != all_image_frame.end(); frame_i++)
{
if(frame_i->second.is_key_frame)
{
kv++;
Vs[kv] = frame_i->second.R * x.segment<3>(kv * 3);
}
}
for (auto &it_per_id : f_manager.feature)
{
it_per_id.used_num = it_per_id.feature_per_frame.size();
if (!(it_per_id.used_num >= 2 && it_per_id.start_frame < WINDOW_SIZE - 2))
continue;
it_per_id.estimated_depth *= s;
}
Matrix3d R0 = Utility::g2R(g);
double yaw = Utility::R2ypr(R0 * Rs[0]).x();
R0 = Utility::ypr2R(Eigen::Vector3d{-yaw, 0, 0}) * R0;
g = R0 * g;
//Matrix3d rot_diff = R0 * Rs[0].transpose();
Matrix3d rot_diff = R0;
for (int i = 0; i <= frame_count; i++)
{
Ps[i] = rot_diff * Ps[i];
Rs[i] = rot_diff * Rs[i];
Vs[i] = rot_diff * Vs[i];
}
ROS_DEBUG_STREAM("g0 " << g.transpose());
ROS_DEBUG_STREAM("my R0 " << Utility::R2ypr(Rs[0]).transpose());
return true;
}
VINS 估计器之结构初始化的更多相关文章
- VINS 估计器之优化与边缘化
VINS的优化除了添加了投影残差,回环检测残差,还有IMU的残差,边缘化产生的先验信息残差等.有些比较难理解,可参考此博客和知乎回答. void Estimator::optimization() { ...
- VINS 估计器之检查视差
为什么检查视差 VINS里为了控制优化计算量,在实时情况下,只对当前帧之前某一部分帧进行优化,而不是全部历史帧.局部优化帧的数量就是窗口大小.为了维持窗口大小,需要去除旧的帧添加新的帧,也就是边缘化 ...
- C语言标记化结构初始化语法
C语言标记化结构初始化语法 (designated initializer),而且还是一个ISO标准. #include <stdio.h> #include <stdlib.h&g ...
- 标记化结构初始化语法 在结构体成员前加上小数点 如 “.open .write .close ”C99编译器 .
今天在看串口驱动(四)的时候 有这样一个结构体初始化 我很不理解 如下: static struct s3c24xx_uart_port s3c24xx_serial_ports[NR_PORTS] ...
- VINS 估计器之外参初始化
为何初始化外参 当外参完全不知道的时候,VINS也可以在线对其进行估计(rotation),先在processImage内进行初步估计,然后在后续优化时,会在optimize函数中再次优化. 如何初始 ...
- VINS(四)初始化与相机IMU外参标定
和单目纯视觉的初始化只需要获取R,t和feature的深度不同,VIO的初始化话通常需要标定出所有的关键参数,包括速度,重力方向,feature深度,以及相机IMU外参$R_{c}^{b}$和$p_{ ...
- VINS(八)初始化
首先通过imu预积分陀螺仪和视觉特征匹配分解Fundamental矩阵获取rotationMatrix之间的约束关系,联立方程组可以求得外参旋转矩阵: 接下来会检测当前frame_count是否达到W ...
- php-5.6.26源代码 - hash存储结构 - 初始化
初始化 有指定析构函数,在销毁hash的时候会调用,如:“类似extension=test.so扩展”也是存放在HashTable中的,“类似extension=test.so扩展”的module_s ...
- 标准C的标记化结构初始化语法
1 struct file_operations { 2 struct module *owner; 3 loff_t (*llseek) (struct file * ...
随机推荐
- KVM之十一:调整cpu和内存
1.virsh edit snale (更改前要将snale shutdown) 找到"memory"和"vcpu"标签,将 <memory unit=' ...
- 真是没想到,ikvm.net居然停止开发了。
看样子作者对.net已经失去了信心 http://weblog.ikvm.net/CommentView.aspx?guid=33ea525f-a291-418a-bd6a-abdf22d0662b# ...
- centos 安装atom 笔记
一.安装atom "To install Atom on Linux, you can download a Debian package or RPM package either fr ...
- java中的异常类型以及区别????
一.引言 根据JDK的文档我们能够找到异常所在的包:java.lang.Throwable中,Throwable是所有异常类的根类,error是错误,在java.lang.error中,而Except ...
- Struts2学习笔记四 OGNL
OGNL,全称为Object-Graph Navigation Language(对象图表达语言),它是一个功能强大的表达式语言,用来获取和设置Java对象的属性,调用java对象的方法,同时能够自动 ...
- python中使用flask时遇到的markupsafe._compat包缺失的问题与解决
环境:windows7 + python3.6.0 在尝试使用python的flask时,按照flask的tutorial操作,装好flask.venv后,对tutorial中的hello.py进行运 ...
- Python多线程案例
from time import ctime,sleep import threading def music(): for i in range(2): print ("I was lis ...
- JAVA_SE基础——21.二维数组的定义
2 二维数组的定义 基本与一维数组类似 //定义一个3行5列的二维数组 //方法1,先new对象,然后再初始化每个元素 int[][] a = new int[3][5]; a[0][0]=1; a[ ...
- python全栈开发-logging模块(日记专用)
一.概述 很多程序都有记录日志的需求,并且日志中包含的信息即有正常的程序访问日志,还可能有错误.警告等信息输出,python的logging模块提供了标准的日志接口,你可以通过它存储各种格式的日志,l ...
- java对象转字节数组,获取泛型类
对象转字节数组,字节数组在恢复成对象 Test.java class Test { public static void main(String args[]) throws IOException, ...