OpenGL(6)——坐标系
在掌握基本变换后,学习如何变换coordinate space。
对coordinate space进行变换的目的是将local space中各顶点坐标转换成normalized device coordinate (NDC),然后传递到Fragment Shader中。对于OpenGL,为了能够最终显示在屏幕上,被转换成NDC的顶点坐标的x、y和z坐标范围应当在[-1, 1],并遵循左手坐标系原则,即坐标范围超出[-1, 1]顶点,均是不可见的。coordinate space变换的步骤如下图所示:
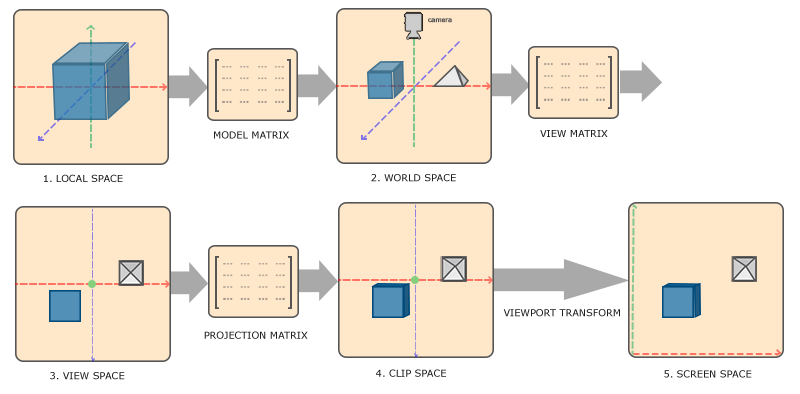
记住五个坐标系和三个矩阵!在编写程序时,也是对这三个矩阵进行操作。分别解释它们的作用:
1. model matrix
model matrix将local coordinate变换为world coordinate。想象一个等边三角形,在最开始它处于local space,坐标系原点就是三角形的中心点。当渲染多个等边三角形时,对于每个处于local space的三角形来说,坐标系原点均是自身的中心点。在对三角形进行scale、rotate和translate后,三角形被分散在了各处,并处在world space中,此时需要一个新的坐标系来表示各三角形的顶点坐标,即world coordinate。也很容易看出,在这个例子中,model matrix就是对三角形进行scale、rotate和translate的变换矩阵。
2. world matrix
world matrix将world coordinate变换为view coordinate。假设此时在world space的任一位置有一个摄像机,如果需要模拟摄像机的观察视角,则应当以摄像机的位置作为坐标系原点重新建立坐标系,而world space中其他物体和摄像机的相对位置应当保持不变。这一变换由world matrix完成,新建立的坐标系就是view coordinate。
3. projection matrix
projection matrix将view coordinate变换为clip coordinate,即NDC,所有可见顶点的坐标范围均在[-1, 1],超出这个范围的顶点都会被裁剪掉。其中顶点的z坐标表示depth value,depth value越大,则距离摄像机正面的距离越远,在渲染时由该顶点插值得到的fragment就越容易被遮挡。在程序中,需要手动使能depth test。projection matrix分为perspective projection matrix和orthographic projection matrix。
最后一步viewport transformation由OpenGL自动完成,所有可见顶点的坐标会根据窗口宽高按比例缩放,并传递到Rasterizer中。
以章节后练习第三题为例,解释代码:
渲染10个立方体,使用model matrix只让是3倍数的立方体旋转(包括第1个立方体),而让剩下的立方体保持静止。
1.
输入渲染一个立方体需要的顶点数据,包括顶点坐标,颜色和纹理坐标。一个立方体有6个面,每个面2个三角形,6个顶点数据,因此总共需要36个顶点数据才能完成一个立方体的渲染。
float vertices3[] = {
-0.5f, -0.5f, -0.5f, 0.84f, 0.38f, 0.157f, 0.0f, 0.0f,
0.5f, -0.5f, -0.5f, 0.84f, 0.38f, 0.157f, 1.0f, 0.0f,
0.5f, 0.5f, -0.5f, 0.84f, 0.38f, 0.157f, 1.0f, 1.0f,
0.5f, 0.5f, -0.5f, 0.84f, 0.38f, 0.157f, 1.0f, 1.0f,
-0.5f, 0.5f, -0.5f, 0.84f, 0.38f, 0.157f, 0.0f, 1.0f,
-0.5f, -0.5f, -0.5f, 0.84f, 0.38f, 0.157f, 0.0f, 0.0f,
-0.5f, -0.5f, 0.5f, 0.84f, 0.38f, 0.157f, 0.0f, 0.0f,
0.5f, -0.5f, 0.5f, 0.84f, 0.38f, 0.157f, 1.0f, 0.0f,
0.5f, 0.5f, 0.5f, 0.84f, 0.38f, 0.157f, 1.0f, 1.0f,
0.5f, 0.5f, 0.5f, 0.84f, 0.38f, 0.157f, 1.0f, 1.0f,
-0.5f, 0.5f, 0.5f, 0.84f, 0.38f, 0.157f, 0.0f, 1.0f,
-0.5f, -0.5f, 0.5f, 0.84f, 0.38f, 0.157f, 0.0f, 0.0f,
-0.5f, 0.5f, 0.5f, 0.84f, 0.38f, 0.157f, 1.0f, 0.0f,
-0.5f, 0.5f, -0.5f, 0.84f, 0.38f, 0.157f, 1.0f, 1.0f,
-0.5f, -0.5f, -0.5f, 0.84f, 0.38f, 0.157f, 0.0f, 1.0f,
-0.5f, -0.5f, -0.5f, 0.84f, 0.38f, 0.157f, 0.0f, 1.0f,
-0.5f, -0.5f, 0.5f, 0.84f, 0.38f, 0.157f, 0.0f, 0.0f,
-0.5f, 0.5f, 0.5f, 0.84f, 0.38f, 0.157f, 1.0f, 0.0f,
0.5f, 0.5f, 0.5f, 0.84f, 0.38f, 0.157f, 1.0f, 0.0f,
0.5f, 0.5f, -0.5f, 0.84f, 0.38f, 0.157f, 1.0f, 1.0f,
0.5f, -0.5f, -0.5f, 0.84f, 0.38f, 0.157f, 0.0f, 1.0f,
0.5f, -0.5f, -0.5f, 0.84f, 0.38f, 0.157f, 0.0f, 1.0f,
0.5f, -0.5f, 0.5f, 0.84f, 0.38f, 0.157f, 0.0f, 0.0f,
0.5f, 0.5f, 0.5f, 0.84f, 0.38f, 0.157f, 1.0f, 0.0f,
-0.5f, -0.5f, -0.5f, 0.84f, 0.38f, 0.157f, 0.0f, 1.0f,
0.5f, -0.5f, -0.5f, 0.84f, 0.38f, 0.157f, 1.0f, 1.0f,
0.5f, -0.5f, 0.5f, 0.84f, 0.38f, 0.157f, 1.0f, 0.0f,
0.5f, -0.5f, 0.5f, 0.84f, 0.38f, 0.157f, 1.0f, 0.0f,
-0.5f, -0.5f, 0.5f, 0.84f, 0.38f, 0.157f, 0.0f, 0.0f,
-0.5f, -0.5f, -0.5f, 0.84f, 0.38f, 0.157f, 0.0f, 1.0f,
-0.5f, 0.5f, -0.5f, 0.84f, 0.38f, 0.157f, 0.0f, 1.0f,
0.5f, 0.5f, -0.5f, 0.84f, 0.38f, 0.157f, 1.0f, 1.0f,
0.5f, 0.5f, 0.5f, 0.84f, 0.38f, 0.157f, 1.0f, 0.0f,
0.5f, 0.5f, 0.5f, 0.84f, 0.38f, 0.157f, 1.0f, 0.0f,
-0.5f, 0.5f, 0.5f, 0.84f, 0.38f, 0.157f, 0.0f, 0.0f,
-0.5f, 0.5f, -0.5f, 0.84f, 0.38f, 0.157f, 0.0f, 1.0f
};
2.
定义数组存放10个向量,model matrix使用这些向量将立方体translate到world space中的不同位置。
glm::vec3 cubePositions[] = {
glm::vec3( 0.0f, 0.0f, 0.0f),
glm::vec3( 2.0f, 5.0f, -15.0f),
glm::vec3(-1.5f, -2.2f, -2.5f),
glm::vec3(-3.8f, -2.0f, -12.3f),
glm::vec3( 2.4f, -0.4f, -3.5f),
glm::vec3(-1.7f, 3.0f, -7.5f),
glm::vec3( 1.3f, -2.0f, -2.5f),
glm::vec3( 1.5f, 2.0f, -2.5f),
glm::vec3( 1.5f, 0.2f, -1.5f),
glm::vec3(-1.3f, 1.0f, -1.5f)
};
3.
定义glm::mat4 coordTransform(std::size_t modelIndex)函数返回变换矩阵,参数std::size_t modelIndex表示model matrix的索引,需要使第1、4、7和10个立方体随时间转动,而第2、3、5、6、8和9个则保持静止。model matrix很容易写出来:
glm::mat4 modelMatrix;
if(modelIndex % 3 == 0)
modelMatrix = glm::rotate(glm::translate(glm::mat4(1.0f), cubePositions[modelIndex]), glm::radians(20.0f * modelIndex) + (float)glfwGetTime(), glm::vec3(1.0f, 0.0f, 0.3f));
else
modelMatrix = glm::rotate(glm::translate(glm::mat4(1.0f), cubePositions[modelIndex]), glm::radians(20.0f * modelIndex), glm::vec3(1.0f, 0.0f, 0.3f));
经过model matrix变换,所有顶点都在world space中,假设此时摄像机的坐标为(0, 0, 4),为了以摄像机为坐标原点重新建立坐标系,需要将所有顶点沿z轴负方向translate4个单位。写出view matrix:
glm::mat4 viewMatrix = glm::translate(glm::mat4(1.0f), glm::vec3(0.0f, 0.0f, -4.0f));
之后调用perspective(FoV, aspect, near, far)函数创建projection matrix,四个参数分别表示视野张开的角度,窗口宽高比,近平面位置和远平面位置。projection matrix的推导和计算可以参考OpenGL Projection Matrix的内容。这里直接调用函数即可:
glm::mat4 projectionMatrix = glm::perspective(glm::radians(45.0f), (float)window_width/(float)window_height, 0.1f, 1000.0f);
最后做两次矩阵的乘法得到最终的变换矩阵并返回:
glm::mat4 transMatrix = projectionMatrix * viewMatrix * modelMatrix;
4.
调用glEnable(GL_DEPTH_TEST)使能depth test,之后开始渲染:
while(!glfwWindowShouldClose(window)){
processInput(window);
glClearColor(0.03f, 0.4f, 0.57f, 1.0f);
glClear(GL_COLOR_BUFFER_BIT|GL_DEPTH_BUFFER_BIT);
glActiveTexture(GL_TEXTURE0);
glBindTexture(GL_TEXTURE_2D, texture[0]);
glActiveTexture(GL_TEXTURE1);
glBindTexture(GL_TEXTURE_2D, texture[1]);
ourShader.use();
glUniform1f(glGetUniformLocation(ourShader.ID, "ratio"), fragmentRatio);
for(size_t modelIndex = 0; modelIndex < 10; ++modelIndex){
glUniformMatrix4fv(glGetUniformLocation(ourShader.ID, "transform"), 1, GL_FALSE, glm::value_ptr(coordTransform(modelIndex)));
glDrawArrays(GL_TRIANGLES, 0, 36);
}
glBindVertexArray(VAO);
glfwSwapBuffers(window);
glfwPollEvents();
}
OpenGL(6)——坐标系的更多相关文章
- OpenGL中坐标系的理解(一)
在OpenGL中,存在着至少存在着三种矩阵,对应着函数glMatrixMode()的三个参数:GL_MODELVIEW,GL_PROJECTION,GL_TEXTURE. 以下主要描述GL_MODEL ...
- cocos2d-x OpenGL ES 坐标系总结
很多教程都说cocos2d-x OpenGL ES世界坐标系原点在左下角,但至于为什么在左下角却从来没有人提过,这导致大部分人觉得这是OpenGL ES的规定,事实上这是错的.OpenGL ES的坐标 ...
- opengl视图变换 投影变换推导
视图变换在opengl中,视图变换的输入是:(1)眼睛位置(或者说相机位置)eys:(2)眼睛朝向的中心center,(就是眼睛朝哪里看);(3)头的方向up.任何一点经过视图变换后都会转化到眼睛坐标 ...
- OpenGL的gluPerspective和gluLookAt的关系[转]
函数原型void gluLookAt(GLdoble eyex, GLdouble eyey, GLdouble eyez, GLdouble centerx, GLdouble centery, ...
- OPenGL中三维图形的矩阵变换
对于二维的图形开发,拿简单的图片显示来说,我们主要的目的:就是在一块显示buffer中,不停的把每个像素进行着色,然后就可以绘制出来了.为了速度,很多其他的加速方法,但原理基本上就是这样了. 很直观, ...
- OpenGL中的拾取模式( Picking)
1. Opengl中的渲染模式有三种:(1)渲染模式,默认的模式:(2)选择模式, (3)反馈模式.如下 GLint glRenderMode(GLenum mode) mode可以选取以下三种模式之 ...
- 基于Cocos2d-x学习OpenGL ES 2.0系列——编写自己的shader(2)
在上篇文章中,我给大家介绍了如何在Cocos2d-x里面绘制一个三角形,当时我们使用的是Cocos2d-x引擎自带的shader和一些辅助函数.在本文中,我将演示一下如何编写自己的shader,同时, ...
- (转)OpenGL混合的基本知识
今天介绍关于OpenGL混合的基本知识.混合是一种常用的技巧,通常可以用来实现半透明.但其实它也是十分灵活的,你可以通过不同的设置得到不同的混合结果,产生一些有趣或者奇怪的图象. 混合是什么呢?混合就 ...
- cocos2d-x坐标系详解
cocos2d-x官方文档 笛卡尔坐标系 不同坐标系简介 笛卡尔坐标系 你可能上学的时候就已经知道“笛卡尔坐标系”了,它在几何课本里经常用到.如果你已经忘得差不多了,下面这些图片可以很快唤起你的记忆: ...
- 04: OpenGL ES 基础教程03 纹理
前言 1:常用类: 1:纹理的作用 正文 一:常用类 上下文 顶点数据缓存 着色器 baseEffect 一:纹理 1.1: 纹理可以控制渲染的每个像素的颜色. 1.2: 纹素:与像素一样,保存每 ...
随机推荐
- FastDFS-基本介绍
1. 什么是FastDFS FastDFS是用c语言编写的一款开源的分布式文件系统.FastDFS为互联网量身定制,充分考虑了冗余备份.负载均衡.线性扩容等机制,并注重高可用.高性能等指标,使用Fas ...
- Excle导出优化(poi)
搜索词条 1.idea报java.lang.OutOfMemoryError: Java heap space怎么解决? 2.java.lang.OutOfMemoryError: GC overhe ...
- JavaScript, JQuery事件委托
1.引言 现实当中,前台MM收到快递后,她会判断收件人是谁,然后按照收件人的要求签收,甚至代为付款.(公司也不会容忍那么多员工站在门口就为了等快递); 这种事件委托还有个好处,就是即便公司又来很多员工 ...
- 如果简化stm32中printf函数的使用——首先重定向
STM32单片机极简方法 使用宏定义 代替复杂的重定向printf()函数,实现串口打印.(HAL库例程)https://blog.csdn.net/wu10188/article/details/9 ...
- MySQL 中Redo与Binlog顺序一致性问题
首先,我们知道在MySQL中,二进制日志是server层的,主要用来做主从复制和即时点恢复时使用的.而事务日志(redo log)是InnoDB存储引擎层的,用来保证事务安全的.现在我们来讨论一下My ...
- MySQL 5.7 GTID OOM bug案例分析 --大量压测后主从不同步
转载自:http://www.sohu.com/a/231766385_487483 MySQL 5.7是十年内最为经典的版本,这个观点区区已经表示过很多次.然而,经典也是由不断地迭代所打造的传奇.5 ...
- 最简单的babel+webpack配置
首先先介绍一下2个重要的库:core-js 和 regenerator core-js core-js 是用于 JavaScript 的组合式标准化库,它包含 es5 (e.g: object.fre ...
- JVM——垃圾回收
目录: 如何判断垃圾是否回收? 引用计数法 可达性分析算法 四种引用 引用队列 垃圾回收算法 标记清除算法 复制算法 标记整理算法 分代垃圾回收 新生代 老年代 Minor GC 和 Full GC的 ...
- getFieldDecorator用法(二)——封装表单模块
后台管理系统经常用到表单查询,因此做了个封装 myorder.js import React from 'react'; import { Card, Button, Table, Form, Sel ...
- docker部署nginx+vue项目
1.vue项目打包 npm run build 会在项目生成dist文件夹,这个文件夹可以使用nginx或tomcat来发布服务 2.查找nginx基础镜像 可以通过以下网站找到符合自己的基础镜像,我 ...