ORB-SLAM2 论文&代码学习 —— 概览
转载请注明出处,谢谢
原创作者:MingruiYU
原创链接:https://www.cnblogs.com/MingruiYu/p/12347171.html
***
本文要点:
- ORB-SLAM2 简介
- ORB-SLAM2 实体对象之间的关系
- ORB-SLAM2 系统概览 (参考论文 + 代码)
- 以思维导图形式绘制的 ORB-SLAM2 程序导图
写在前面
最近准备开始做本科毕业设计,准备对 SLAM 系统中的回环检测模块下手。因为新冠疫情不知道什么时候才能返校,这次放假回家就带了个 matebook 14 回来,搬砖全靠这小电脑,它苦我也苦(流泪)。
作为开源 SLAM 系统中的经典之一 —— ORB-SLAM2,自然是要拿来好好研究一番。之前阅读了 ORB-SLAM 和 ORB-SLAM2 论文,之后配置安装了 ORB-SLAM2 跑了个 example 看看样子(我的博文 ORB-SLAM2 初体验 —— 配置安装),这回准备开始磕代码。但越磕越发现,这玩意也太复杂了吧。为了实现较好的鲁棒性,ORB-SLAM2 中加入了很多很多小 trick 来从细节上提升系统的性能。这些细节在论文里往往就是一句话带过,但在代码里就是一大堆环环相扣绕来绕去的东西。虽然大家都说 ORB-SLAM2 的代码是结构清晰,注释完整,易于理解,但本渣渣还是看的把头发挠成了鸟窝状。
所以,我决定通过写博文的方式,来更好地梳理 ORB-SLAM2 代码的框架和步骤,以加深自己的理解,也希望我的梳理能够对大家有所帮助。
ORB-SLAM2 简介
ORB-SLAM是15年Raul等人提出的一个单目SLAM系统,其在单目SLAM领域影响广泛。详情可见论文:[Monocular] Raúl Mur-Artal, J. M. M. Montiel and Juan D. Tardós. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Transactions on Robotics, vol. 31, no. 5, pp. 1147-1163, 2015. (2015 IEEE Transactions on Robotics Best Paper Award). PDF.
在单目ORB-SLAM的基础上,17年Raul等人又提出了ORB-SLAM2,增加了对于双目相机和RGB相机的支持。详情可见论文:[Stereo and RGB-D] Raúl Mur-Artal and Juan D. Tardós. ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras. IEEE Transactions on Robotics, vol. 33, no. 5, pp. 1255-1262, 2017. PDF
ORB-SLAM2 的论文中,对于单目部分并没有做很大修改,也没有笔墨去重写单目实现的细节。而其虽然增加了双目和 RGB-D 相机的支持,但本质上还是在单目系统的基础上加的,并不是从根本上以双目或 RGB-D 输入为设计出发点。所以个人认为,学习 ORB-SLAM2 还是要以单目为主,不能绕开单目去看双目或 RGB-D 的实现。另外,因为 ORB-SLAM2 论文中并没有重写单目实现的细节,所以对于 ORB-SLAM2 的学习还是要从第一篇 ORB-SLAM 的论文入手。以下内容均以 ORB-SLAM 单目部分为基础。
一些铺垫
ORB-SLAM2 中的实体对象
ORB-SLAM2 中的实体对象包括:
- Frame
- KeyFrame
- MapPoint
- Map
- KeyFrame Database
它们之间的关系是这样的:
- 每一个送入系统的视频帧都会构造一个 Frame
- Frame 中比较重要的会设为 KeyFrame
- 每个 Frame 会提取很多 ORB 特征点,每一个 ORB 特征点可能会对应一个 MapPoint
- 同一个 MapPoint 会对应多个不同 Frame 中 ORB 特征
- KeyFrames 和 MapPoints 构成了 Map
- 重要的 KeyFrame 会存入 KeyFrame Database,用于回环检测和重定位
博文中可能出现的简称
- KF:表示 KeyFrame
- Current KF:表示当前 KeyFrame
- Covisible KF:表示在 Covisibility Graph 中与 Current KF 相连的 KFs
- Loop KF:表示回环 KeyFrame,即和 Current KF 相匹配的 KeyFrame Database 中的 KF
- Candidate KF:表示可能是 Current KF 的 Loop KF 的候选 KF
- Reference KF:表示距离当前帧最近的上一 KF
- KF Database:表示用来存储 KFs 的 Database,这些 KFs 会用于回环检测和重定位
ORB-SLAM2 系统概览
下面我会从论文和代码(程序导图)两个角度出发,对 ORB-SLAM2 系统进行一个概览。
以论文为参考
ORB-SLAM 论文中,有一张图非常经典且重要:
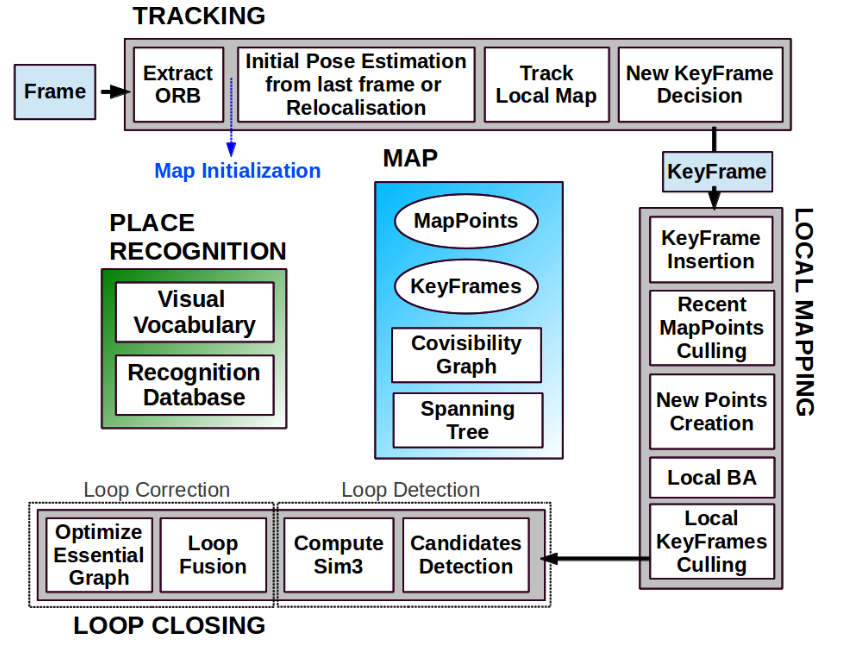
ORB-SLAM 系统同时运行三个线程:
- Tracking 线程:
- 对于新读取的帧,提取 ORB 特征
- (系统初始化)
- 相机位姿初值估计(根据上一帧 + motion-only BA,或进行重定位)
- 局部地图跟踪
- 对上一步得到的位姿初值进行进一步 BA 优化
- 局部地图:指 Covisibility Graph 中附近的 KFs 及其 MapPoints 所组成的局部的地图
- 决定是否将该帧作为关键帧插入 LocalMapping 线程
- LocalMapping 线程:
- 接收从 Tracking 线程插入的 KF,并进行预处理
- 剔除质量较差的 MapPoints
- 通过三角化生成新的 MapPoints
- Current KF 未与现有 MapPoints 匹配的 ORB 特征点 与其 Covisible KFs 的特征点进行匹配,并三角化
- Local BA
- 剔除冗余的局部关键帧
- LoopClosing 线程
- 接收 LoopClosing 送来的筛选处理后的 KF
- 检测出一批 Candidate KFs
- 计算 Sim3,确定最终的 Loop KF
- 进行回环融合
- 优化 Essential Graph
其中 Covisibility Graph 指的是:其节点为所有 KF。一个 KF,如果它与另一个 KF 观测到的相同的 MapPoints 的数量大于15个,则这两个 KFs 之间有边相连。从而组成了 Covisibility Graph。同时,Covisibility Graph 中的每条边有权重,权重即为两个 KFs 共同观测到的 MapPoints 数目。
其中 Essential Graph 指的是:系统会构造一个生成树。当一个新的 KF 插入时,将它与(与它观测到相同的 MapPoints 的数量最多的 KF)相连,从而得到一个生成树。Essential Graph = 该生成树 + Covisibility Graph 中权重大于100的边。
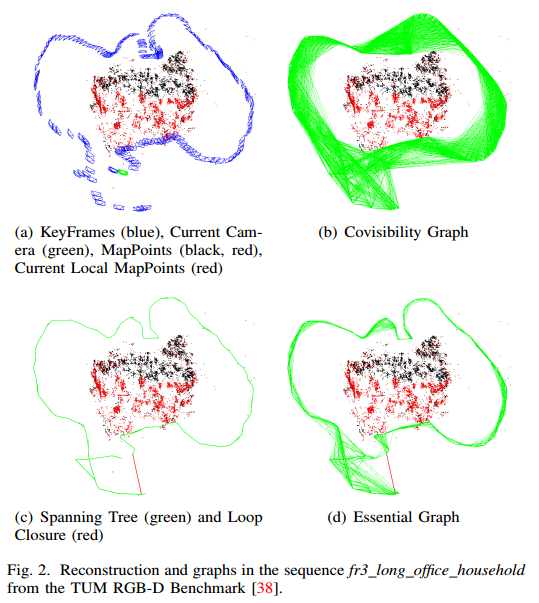
从上图可以看出,Covisibility Graph 中的边很多,生成树就是一条线,而 Essential Graph 介于两者之间。
以代码(程序导图)为参考
上面论文里那张框架图概括的非常好,但是这张图还是太简略了,光看它也搞不懂每个步骤之间的逻辑关系是怎样。而它们之间复杂的逻辑关系用大段文字更是很难描述清楚。在通读代码的时候,我经常读着读着就忘了前面读了什么,忘了现在读的部分是嵌套在哪里循环里,是属于哪个子函数。于是我想了个办法 —— 用思维导图来梳理代码的结构和逻辑。试验过后,我觉得这个办法很好用。此处献上我梳理的非常非常大的 ORB-SLAM2 程序导图:
(就是下方白花花的这一片,大家用鼠标多上下左右划划就能看到导图的主体部分了)
这么看实在是不方便,没事,这里放下程序导图的链接:ORB-SLAM2 程序框图,这个导图梳理的挺详细的了,希望它能对大家有帮助。
{kind=link}
(我用的 MindMaster 这款画思维导图的软件,Windows Linux ios Andriod 都支持,同时可以将导图存储在个人云上多设备共享,另外也支持生成并分享导图链接)
我绘制的程序导图是以 mono_tum.cc 程序为入口,该程序是官方提供的 example,其对 TUM 数据集中的视频序列进行 SLAM。根据该程序,我们可以清晰地看出该怎么调用整个 ORB-SLAM2 系统。
ORB-SLAM2 系统以 System.cc 为系统的入口,其负责创建各种对象,同时创建 Tracking,LocalMapping, LoopCLosing 三个线程并运行。其中,System::TrackMonocular()是启动 Tracking 线程的入口。Tracking 线程为主线程,而 LocalMapping 和 LoopClosing 线程是通过 new thread 创建的。
关于 Tracking,LocalMapping, LoopCLosing 三个线程的具体内容,我会在以后的博文中进行更为详细的介绍和梳理。
其它相关博文
ORB-SLAM2 论文&代码学习 —— 概览的更多相关文章
- ORB-SLAM2 论文&代码学习 ——Tracking 线程
本文要点: ORB-SLAM2 Tracking 线程 论文内容介绍 ORB-SLAM2 Tracking 线程 代码结构介绍 写在前面 上一篇文章中我们已经对 ORB-SLAM2 系统有了一个概览性 ...
- ORB-SLAM2 论文&代码学习 —— 单目初始化
转载请注明出处,谢谢 原创作者:Mingrui 原创链接:https://www.cnblogs.com/MingruiYu/p/12358458.html 本文要点: ORB-SLAM2 单目初始化 ...
- ORB-SLAM2 论文&代码学习 —— LocalMapping 线程
转载请注明出处,谢谢 原创作者:Mingrui 原创链接:https://www.cnblogs.com/MingruiYu/p/12360913.html 本文要点: ORB-SLAM2 Local ...
- ORB-SLAM2 论文&代码学习 —— LoopClosing 线程
转载请注明出处,谢谢 原创作者:Mingrui 原创链接:https://www.cnblogs.com/MingruiYu/p/12369339.html 本文要点: ORB-SLAM2 LoopC ...
- 深度学习(一。深度学习概览)(mooc视频https://www.icourse163.org/learn/MSRA-1002255002?tid=1002370003#/learn/content?type=detail&id=1003271123)
一. 深度学习概览 1.为什么resnet应用在图像识别 因为传统神经网络精度有限,而只是增加层数无法提高精度.而resnet可以改变这个问题. 2.Microsoft SwitchBoard 在语音 ...
- ORB SLAM2在Ubuntu 16.04上的运行配置
http://www.mamicode.com/info-detail-1773781.html 安装依赖 安装OpenGL 1. 安装opengl Library$sudo apt-get inst ...
- u-boot代码学习内容
前言 u-boot代码庞大,不可能全部细读,只能有选择的读部分代码.在读代码之前,根据韦东山教材,关于代码学习内容和深度做以下预先划定. 一.Makefile.mkconfig.config.mk等 ...
- orb slam2 双目摄像头
主要参考了http://blog.csdn.net/awww797877/article/details/51171099这篇文章,其中需要添加的是:export ROS_PACKAGE_PATH=$ ...
- Objective-C代码学习大纲(3)
Objective-C代码学习大纲(3) 2011-05-11 14:06 佚名 otierney 字号:T | T 本文为台湾出版的<Objective-C学习大纲>的翻译文档,系统介绍 ...
随机推荐
- 深入理解 Java 并发锁
本文以及示例源码已归档在 javacore 一.并发锁简介 确保线程安全最常见的做法是利用锁机制(Lock.sychronized)来对共享数据做互斥同步,这样在同一个时刻,只有一个线程可以执行某个方 ...
- 小白学 Python 爬虫(40):爬虫框架 Scrapy 入门基础(七)对接 Selenium 实战
人生苦短,我用 Python 前文传送门: 小白学 Python 爬虫(1):开篇 小白学 Python 爬虫(2):前置准备(一)基本类库的安装 小白学 Python 爬虫(3):前置准备(二)Li ...
- cogs 1001. [WZOI2011 S3] 消息传递 Tarjan
1001. [WZOI2011 S3] 消息传递 ★★ 输入文件:messagew.in 输出文件:messagew.out 简单对比时间限制:1 s 内存限制:128 MB Prob ...
- 2018南京现场赛D 模拟退火
题目链接:https://codeforces.com/gym/101981/attachments 给你n个城市的三维坐标,叫你求得一个坐标使这个坐标到其他城市的最大距离最小,并输出这个距离(距离不 ...
- java"小心机"(1)【资源彩蛋!】
每天进步一点点,距离大腿又近一步! 阅读本文大概需要9分钟 java"小心机"系列文章在此开篇.在这,将会给你带来曾经错过.忽略或感到模糊的知识,也许它很基础,微不足道,但它能修复 ...
- springboot中使用logback
原文地址:https://blog.csdn.net/tianyaleixiaowu/article/details/73321610 Springboot默认集成的就是logback,logback ...
- python实现数据结构-队列
注:本文档主要是学习<Python核心编程(第二版)>时的练习题. 队列是一种"先进先出"的数据结构(FIFO),是一种操作受限的线性结构,先进队列的成员先出队列.示意 ...
- 最新Pyecharts-基本图表
Pyecharts是由Echarts而来,Echarts是百度开源的数据可视化的库,适合用来做图表设计开发,当使用Python与Echarts结合时就产生了Pyecharts.可使用pip安装,默认是 ...
- 小白学Java:File类
目录 小白学Java:File类 不同风格的分隔符 绝对与相对路径 File类常用方法 常用构造器 创建方法 判断方法 获取方法 命名方法 删除方法 小白学Java:File类 我们可以知道,存储在程 ...
- [转]dll反编译工具(ILSpy)的使用
软件地址: 链接:https://pan.baidu.com/s/1YunJ3MAuNisGtl8YYzr4hw 密码:ejx8 工具使方法 1.将压缩文件进行解压,打开exe文件. 2.打开后,选择 ...