语义SLAM研究现状总结
博客转载自:https://blog.csdn.net/xiaoxiaowenqiang/article/details/81051010 原文标题:深度学习结合SLAM 语义slam 语义分割 端到端SLAM CNN-SLAM DenseSLAM orbslam2 + ssd LSD-SLAM + CNN SemanticFusion Mask
深度学习结合SLAM 研究现状总结
1. 用深度学习方法替换传统slam中的一个/几个模块:
特征提取,特征匹配,提高特征点稳定性,提取点线面等不同层级的特征点。
深度估计
位姿估计
重定位
其他
目前还不能达到超越传统方法的效果,
相较传统SLAM并没有很明显的优势(标注的数据集少且不全,使用视频做训练数据的非常少。
SLAM中很多问题都是数学问题,深度学习并不擅长等等原因)。
2. 在传统SLAM之上加入语义信息
图像语义分割
语义地图构建
语义SLAM算是在扩展了传统SLAM问题的研究内容,现在出现了一些将语义信息集成到SLAM的研究,
比如说用SLAM系统中得到的图像之间的几何一致性促进图像语义分割,
也可以用语义分割/建图的结果促进SLAM的定位/闭环等,前者已经有了一些研究,
不过还是集中于室内场景,后者貌似还没有什么相关研究。
如果SLAM和语义分割能够相互促进相辅相成,应该能达到好的效果。
另:使用SLAM帮助构建大规模的图像之间有对应关系的数据集,
可以降低深度学习数据集的标注难度吧,应该也是一个SLAM助力深度学习的思路。
6
3. 端到端SLAM
其实端到端就不能算是SLAM问题了吧,SLAM是同步定位与地图构建,端到端是输入image输出action,没有定位和建图。
- 机器人自主导航(深度强化学习)等
1. 用深度学习方法替换传统slam中的一个/几个模块:
A. CNN-SLAM: Real-time dense monocular SLAM with learned depth prediction
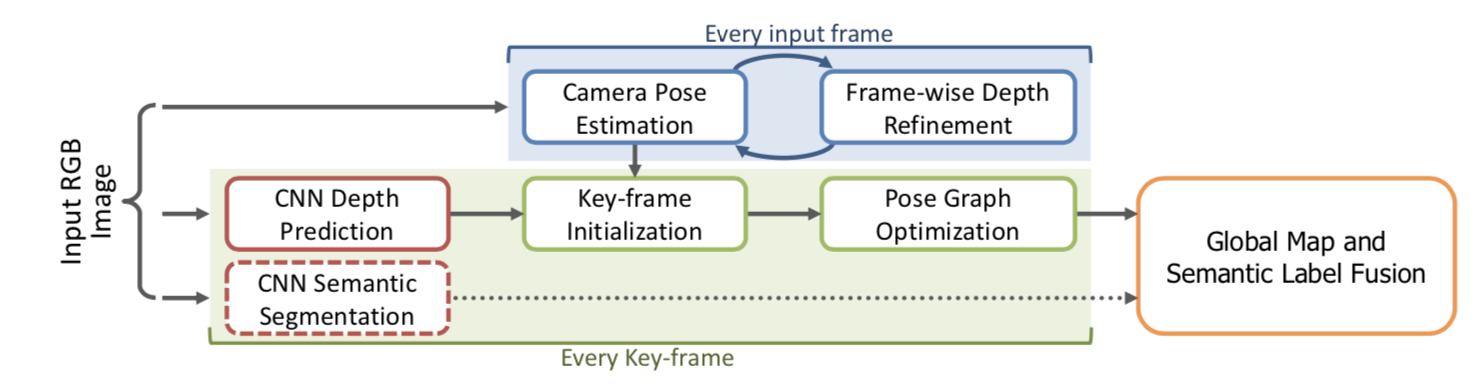
基于CNN的单张图深度估计,语义SLAM,半稠密的直接法SLAM.
将LSD-SLAM里的深度估计和图像匹配都替换成基于CNN的方法,取得了更为robust的结果,并可以融合语义信息.
鉴于卷积神经网络(CNN)深度预测的最新进展,
本文研究了深度神经网络的预测深度图,可以部署用于精确和密集的单目重建。
我们提出了一种方法,其中CNN预测的稠密深度图与通过直接单目SLAM获得的深度测量自然地融合在一起。
我们的融合方案在图像定位中优于单目SLAM方法,例如沿低纹理区域,反之亦然。
我们展示了使用深度预测来估计重建的绝对尺度,从而克服了单眼SLAM的主要局限性之一。
最后,我们提出一个框架,从单个帧获得的语义标签有效地融合了密集的SLAM,从单个视图产生语义相干的场景重构。
两个基准数据集的评估结果显示了我们的方法的鲁棒性和准确性。

语义SLAM研究现状总结的更多相关文章
- 深度学习结合SLAM研究总结
博客转载自:https://blog.csdn.net/u010821666/article/details/78793225 原文标题:深度学习结合SLAM的研究思路/成果整理之 1. 深度学习跟S ...
- NLP+语篇分析(五)︱中文语篇分析研究现状(CIPS2016)
摘录自:CIPS2016 中文信息处理报告<第三章 语篇分析研究进展.现状及趋势>P21 CIPS2016 中文信息处理报告下载链接:http://cips-upload.bj.bcebo ...
- NLP+语义分析(四)︱中文语义分析研究现状(CIPS2016、角色标注、篇章分析)
摘录自:CIPS2016 中文信息处理报告<第二章 语义分析研究进展. 现状及趋势>P14 CIPS2016> 中文信息处理报告下载链接:http://cips-upload.bj. ...
- 最近一年语义SLAM有哪些代表性工作?
点击"计算机视觉life"关注,置顶更快接收消息! 本文由作者刘骁授权发布,转载请联系原作者,个人主页http://www.liuxiao.org 目前 Semantic SLAM ...
- 语义SLAM的数据关联和语义定位(一)
语义SLAM和多传感器融合是自动驾驶建图和定位部分比较热门的两种技术.语义SLAM中,语义信息的数据关联相较于特征点的数据关联有所不同.我们一般用特征描述子的相似性来匹配和关联不同图像中的特征点.特征 ...
- 语义slam用于高精地图和高精定位的一些想法
最近一直在考虑语义slam在自动驾驶和辅助驾驶中的用法,研究了一下视觉为主的高精度地图+高精定位的模式,特别是mobileye的REM. 秉承先建图再定位的思路,在服务器端(云端)建图,在车端定位. ...
- 分享| 语义SLAM的未来与思考(泡泡机器人)
相比典型的点云地图,语义地图能够很好的表示出机器人到的地方是什么,机器人“看”到的东西是什么.比如进入到一个房间,点云地图中,机器人并不能识别显示出来的一块块的点云到底是什么,但是语义地图的构建可以分 ...
- VR的国内研究现状及发展趋势
转载请声明转载地址:http://www.cnblogs.com/Rodolfo/,违者必究. 一.国内研究现状 我国虚拟现实技术研究起步较晚,与发达国家还有一定的差距. 随着计算机图形学.计算机系统 ...
- RNA测序研究现状与发展
RNA测序研究现状与发展 1 2,584 A+ 所属分类:Transcriptomics 收 藏 通常来说,某一个物种体内所有细胞里含有的DNA都应该是一模一样的,只是因为每一种细胞里所表达的R ...
随机推荐
- 42.Odoo产品分析 (四) – 工具板块(10) – 问卷(2)
查看Odoo产品分析系列--目录 接上一篇Odoo产品分析 (四) – 工具板块(10) – 问卷(1) 4 页面 即问卷,点开一项查看: 可以看出,网页就是问卷本身的子目录,其中指明了该目录包括哪 ...
- SpringBoot Web学习笔记
一.资源的访问: 情形一.所有的 /webjars/** 都会去 classpath:/META_INFO/resource/webjars/ 下找资源: webjars:以jar包的方式引入静态 ...
- 集成Android人脸识别demo分享
本应用来源于虹软人工智能开放平台,人脸识别技术工程如何使用? 1.下载代码 git clone https://github.com/andyxm/ArcFaceDemo.git 2.下载虹软人脸识别 ...
- 微信小程序(二)登录授权实现
相对于上一节,这一节主要是动态获取数据,主要是对登陆信息的接收,以及页面获取授权按钮的相对相应(未授权时,显示,授权后不显示) 关键在于状态值的判断,以及对页面的不同响应(m-->v) wxml ...
- 【English】二、It作为代词,可以代指什么
it的用法 一.用作人称代词: 1.指代事物: — What’s this? — It’s a cat.2.指代人:常用于不知对方性别时,比如:询问敲门人或打电话时询问对方是谁,或者用来指代婴儿. ( ...
- 数据库H2学习
本文转载自:https://www.cnblogs.com/xdp-gacl/p/4171024.html 一.H2数据库介绍 常用的开源数据库有:H2,Derby,HSQLDB,MySQL,Post ...
- 20180831-Linux环境下Python 3.6.6 的安装说明
20180831-Linux环境下Python 3.6.6 的安装说明 摘要:Python3 安装部署,普通用户,编译安装 Author: andy_yhm@yeah.net Date: 201808 ...
- vmware station-ubuntu18.04 共享剪贴板
辞职在家休息,买了台新电脑,装个虚拟机,安装visual studio, android studio, qt, everything, noptepad++,hbuilder,ditto,xx-ne ...
- .NET MVC全局异常处理(二)
目录 .NET MVC全局异常处理(二) MVC过滤器Filter .NET MVC全局异常处理(二) 对上节的内容进行了补充 MVC过滤器Filter MVC有四种过滤器:Authorization ...
- Docker的使用初探(一):常用指令说明
目录 Docker的使用初探(一):常用指令说明 为什么要用Docker Docker的安装与简单使用 国内镜像加速 常用指令 Docker的使用初探(一):常用指令说明 前几个星期实践的了,再不记录 ...