转载:DRC
https://cn.mathworks.com/help/audio/ug/dynamic-range-control.html?requestedDomain=cn.mathworks.com
https://en.wikipedia.org/wiki/Dynamic_range_compression
Dynamic range control is the adaptive adjustment of the dynamic range of a signal. The dynamic range of a signal is the logarithmic ratio of maximum to minimum signal amplitude specified in dB.
You can use dynamic range control to:
Match an audio signal level to its environment
Protect AD converters from overload
Optimize information
Suppress low-level noise
Types of dynamic range control include:
Dynamic range compressor — Attenuates the volume of loud sounds that cross a given threshold. They are often used in recording systems to protect hardware and to increase overall loudness.

Dynamic range limiter — A type of compressor that brickwalls sound above a given threshold.
Dynamic range expander — Attenuates the volume of quiet sounds below a given threshold. They are often used to make quiet sounds even quieter.
Noise gate — A type of expander that brickwalls sound below a given threshold.
This tutorial shows how to implement dynamic range control systems using the compressor, expander, limiter, and noiseGate System objects from Audio System Toolbox™. The tutorial also provides an illustrated example of dynamic range limiting at various stages of a dynamic range limiting system.
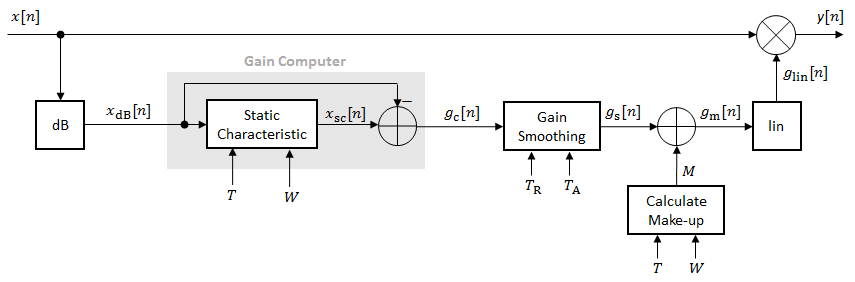
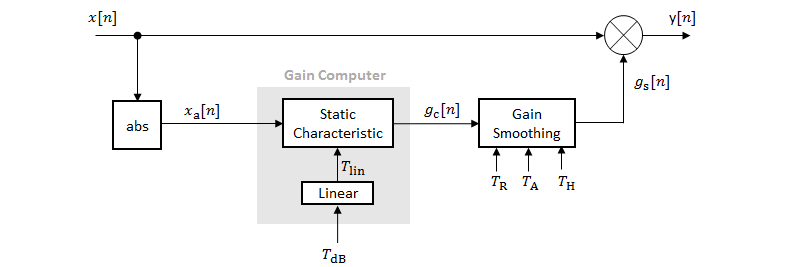
The diagram depicts a general dynamic range control system.

In a dynamic range control system, a gain signal is calculated in a sidechain and then applied to the input audio signal. The sidechain consists of:
Linear to dB conversion:x→xdB
Gain computation, by passing the dB signal through a static characteristic equation, and then taking the difference: gc=xsc−xdB
Gain smoothing over time: gc→gs
Addition of make-up gain (for compressors and limiters only): gs→gm
dB to linear conversion: gm→glin
Application of the calculated gain signal to the original audio signal: y=glin×x
Linear to dB Conversion
The gain signal used in dynamic range control is processed on a dB scale for all dynamic range controllers. There is no reference for the dB output; it is a straight conversion: xdB=20log10(x). You might need to adjust the output of a dynamic range control system to the range of your system.
Gain Computer
The gain computer provides the first rough estimate of a gain signal for dynamic range control. The principal component of the gain computer is the static characteristic. Each type of dynamic range control has a different static characteristic with different tunable properties:
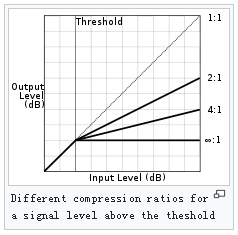
Threshold–– All static characteristics have a threshold. On one side of the threshold, the input is given to the output with no modification. On the other side of the threshold, compression, expansion, brickwall limiting, or brickwall gating is applied.Ratio–– Expanders and compressors enable you to adjust the input-to-output ratio of the static characteristic above or below a given threshold.The amount of gain reduction is determined by ratio: a ratio of 4:1 means that if input level is 4 dB over the threshold, the output signal level is reduced to 1 dB over the threshold. The gain and output level has been reduced by 3 dB:
The highest ratio of ∞:1 is often known as limiting. It is commonly achieved using a ratio of 60:1, and effectively denotes that any signal above the threshold is brought down to the threshold level once the attack time has expired.
KneeWidth–– Expanders, compressors, and limiters enable you to adjust the knee width of the static characteristic. The knee of a static characteristic is centered at the threshold. An increase in knee width creates a smoother transition around the threshold. A knee width of zero provides no smoothing and is known as a hard knee. A knee width greater than zero is known as a soft knee.
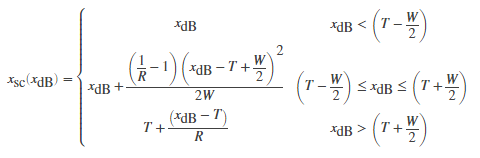
compressor/limiter/expander:
Compressor:
Limiter:
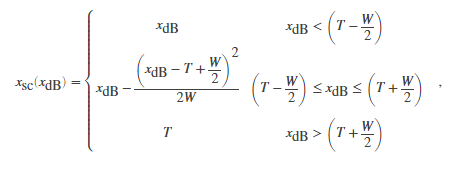
Expander:
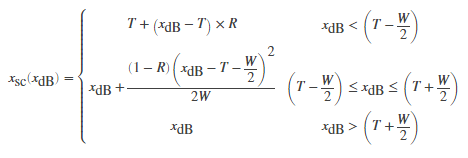
where T is the threshold, R is the compression ratio, and W is the knee width.
If you specified a hard knee, the gain computer has the following static characteristic:
Compressor:

Limiter:
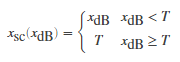
Expander:
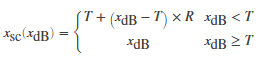
The computed gain, gc[n], is calculated as

Noise Gate:


In these static characteristic plots, the expander, limiter, and compressor each have a 10 dB knee width.

Gain Smoothing
All dynamic range controllers provide gain smoothing over time. Gain smoothing diminishes sharp jumps in the applied gain, which can result in artifacts and an unnatural sound. You can conceptualize gain smoothing as the addition of impedance to your gain signal.
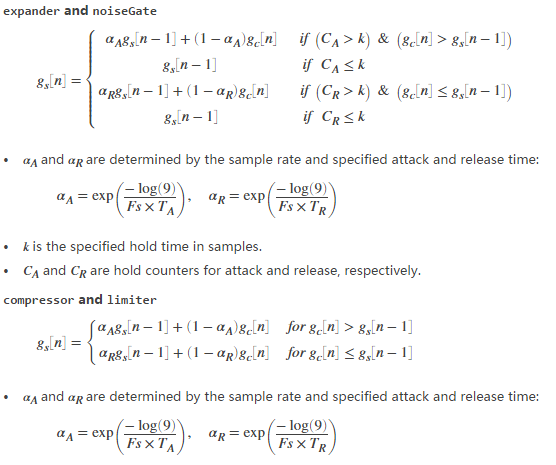
The expander and noiseGate objects have the same smoothing equation, because a noise gate is a type of expander. The limiter and compressor objects have the same smoothing equation, because a limiter is a type of compressor.
The type of gain smoothing is specified by a combination of attack time, release time, and hold time coefficients. Attack time and release time correspond to the time it takes the gain signal to go from 10% to 90% of its final value. Hold time is a delay period before gain is applied. See the algorithms of individual dynamic range controller pages for more detailed explanations.
Smoothing Equations
When the signal level goes above threshold, compressor operation is delayed by the attack setting. For an amount of time determined by the release after the input signal has fallen below the threshold, the compressor continues to apply dynamic range compression.

Attack and release:
The length of each period is determined by the rate of change and the required change in gain. For more intuitive operation, a compressor's attack and release controls are labeled as a unit of time (often milliseconds). This is the amount of time it takes for the gain to change a set amount of dB, decided by the manufacturer—often 10 dB. For example, if the compressor's time constants are referenced to 10 dB, and the attack time is set to 1 ms, it takes 1 ms for the gain to decrease by 10 dB, and 2 ms to decrease by 20 dB.
In many compressors the attack and release times are adjustable by the user. Some compressors, however, have the attack and release times determined by the circuit design and these cannot be adjusted by the user. Sometimes the attack and release times are 'automatic' or 'program dependent', meaning that the times change depending on the input signal. Because the loudness pattern of the source material is modified by the compressor it may change the character of the signal in subtle to quite noticeable ways depending on the settings used.
Gain Smoothing Example
Examine a trivial case of dynamic range compression for a two-step input signal. In this example, the compressor has a threshold of –10 dB, a compression ratio of 5, and a hard knee.

Several variations of gain smoothing are shown. On the top, a smoothed gain curve is shown for different attack time values, with release time set to zero seconds. In the middle, release time is varied and attack time is held constant at zero seconds. On the bottom, both attack and release time are specified by nonzero values.

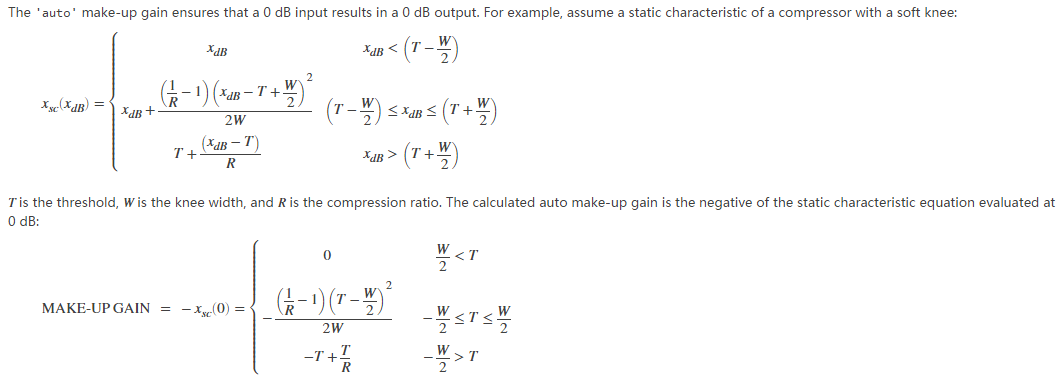
Make-Up Gain
Make-up gain applies for compressors and limiters, where higher dB portions of a signal are attenuated or brickwalled. The dB reduction can significantly reduce total signal power. In these cases, make-up gain is applied after gain smoothing to increase the signal power. In Audio System Toolbox, you can specify a set amount of make-up gain or specify the make-up gain mode as 'auto'.
dB to Linear Conversion
Once the gain signal is determined in dB, it is transferred to the linear domain:
Apply Calculated Gain
The final step in a dynamic control system is to apply the calculated gain by multiplication in the linear domain.
Example: Dynamic Range Limiter
The audio signal described in this example is a 0.5 second interval of a drum track. The limiter properties are:
Threshold = –15 dB
Knee width = 0 (hard knee)
Attack time = 0.004 seconds
Release time = 0.1 seconds
Make-up gain = 1 dB
To create a limiter System object™ with these properties, at the MATLAB® command prompt, enter:
dRL = limiter('Threshold',-15,...
'KneeWidth',0,...
'AttackTime',0.004,...
'ReleaseTime',0.1,...
'MakeUpGainMode','property',...
'MakeUpGain',1);
This example provides a visual walkthrough of the various stages of the dynamic range limiter system.

Linear to dB Conversion
The input signal is converted to a dB scale element by element.

Gain Computer
The static characteristic brickwall limits the dB signal at –15 dB. To determine the dB gain that results in this limiting, the gain computer subtracts the original dB signal from the dB signal processed by the static characteristic.

Gain Smoothing
The relatively short attack time specification results in a steep curve when the applied gain is suddenly increased. The relatively long release time results in a gradual diminishing of the applied gain.

Make-Up Gain
Assume a limiter with a 1 dB make-up gain value. The make-up gain is added to the smoothed gain signal.

dB to Linear Conversion
The gain in dB is converted to a linear scale element by element.

Apply Calculated Gain
The original signal is multiplied by the linear gain.

References
[1] Zolzer, Udo. "Dynamic Range Control." Digital Audio Signal Processing. 2nd ed. Chichester, UK: Wiley, 2008.
[2] Giannoulis, Dimitrios, Michael Massberg, and Joshua D. Reiss. "Digital Dynamic Range Compressor Design –– A Tutorial And Analysis." Journal of Audio Engineering Society. Vol. 60, Issue 6, 2012, pp. 399–408.
转载:DRC的更多相关文章
- (转载)Eclipse将引用了第三方jar包的Java项目打包成可执行jar的两种方法
转载自:http://www.cnblogs.com/lanxuezaipiao/p/3291641.html 方案一:用Eclipse自带的Export功能 步骤1:准备主清单文件 "MA ...
- ORCAD常见DRC错误
一下就是网上整理的: https://blog.csdn.net/weixin_39671078/article/details/85344762 https://wenku.baidu.com/vi ...
- [转载]克服FPGA I/O引脚分配挑战--xilinx系列
转载走,放到自己的分类中好了 原文地址:I/O引脚分配挑战--xilinx系列">克服FPGA I/O引脚分配挑战--xilinx系列作者:方槍槍 http://www.eefocus ...
- drc实现
原理参考之前转载的matlab上关于DRC的描述. 目前主要实现了compressor和expander. compressor: Limit: expander: 实现代码: #include< ...
- (转载)Altium Designer 17 (AD17)
转载自:http://blog.csdn.net/qq_29350001/article/details/52199356 以前是使用DXP2004来画图的,后来转行.想来已经有一年半的时间没有画过了 ...
- 转:进行vivado开发时,Generate Bitstream报错[DRC NSTD-1],详细解决步骤
报错如下 [Drc 23-20] Rule violation (NSTD-1) Unspecified I/O Standard - 4 out of 142 logical ports use I ...
- Crystal Clear Applied: The Seven Properties of Running an Agile Project (转载)
作者Alistair Cockburn, Crystal Clear的7个成功要素,写得挺好. 敏捷方法的关注点,大家可以参考,太激动所以转载了. 原文:http://www.informit.com ...
- RTP与RTCP协议介绍(转载)
RTSP发起/终结流媒体.RTP传输流媒体数据 .RTCP对RTP进行控制,同步.RTP中没有连接的概念,本身并不能为按序传输数据包提供可靠的保证,也不提供流量控制和拥塞控制,这些都由RTCP来负责完 ...
- 《Walking the callstack(转载)》
本文转载自:https://www.codeproject.com/articles/11132/walking-the-callstack Download demo project with so ...
随机推荐
- centos8 samba
安装dnf install -y samba samba-client开机启动systemctl enable smb立即启动systemctl start smb防火墙放行firewall-cmd ...
- AC自动机(模板+例题)
首先要明白AC自动机是干什么的: AC自动机其实就是一种多模匹配算法,那么你可能会问什么叫做多模匹配算法.下面是我对多模匹配的理解,与多模与之对于的是单模,单模就是给你一个单词,然后给你一个字符串,问 ...
- Mysql分库分表导出导入和数据量统计测试
需求:添加创建了分库分表后,业务可能将数据已经写入,但未来得及接入到otter汇总库.接入汇总库前需要初始化这部分数据. 1.导出 ip_port_list ) len=${#ip_port_list ...
- 851. spfa求最短路(spfa算法模板)
给定一个n个点m条边的有向图,图中可能存在重边和自环, 边权可能为负数. 请你求出1号点到n号点的最短距离,如果无法从1号点走到n号点,则输出impossible. 数据保证不存在负权回路. 输入格式 ...
- babel plugin
a = () => {}, // Support for the experimental syntax 'classProperties' isn't currently enabled ya ...
- 假期学习【十一】Python切词,以及从百度爬取词典
今天主要对从CSDN爬取的标题利用jieba(结巴)进行分词,但在分词过程中发现,如大数据被分成了大/数据,云计算被分隔成了云/计算. 后来又从百度百科--->信息领域爬取了相关词语作为词典,预 ...
- docker的个人理解
一.什么是docker? docker就是集装箱的原理.可以实现远超于虚拟机的轻量级虚拟化.它是内核级的虚拟化.期望达到使项目运行环境一次封装,到处运行的目的. 集装箱解决了什么问题?在一艘大船上,可 ...
- Cannot resolve collation conflict between "Chinese_Taiwan_Stroke_CI_AS" and "Chinese_PRC_CI_AS" in UNION ALL operator occurring in SELECT statement column 1.
Cannot resolve collation conflict between . 解决方案: COLLATE Chinese_PRC_CI_AS 例子: SELECT A.Name FROM A ...
- Windows下MongoDB的配置及其远程连接
基本操作MongoDB的基本安装https://blog.csdn.net/heshushun/article/details/77776706启动和配置MongoDB服务参考博客https://bl ...
- 常用的H5代码
1.返回上一页第一次在手机端用到返回上一页的时候,只写了window.history.go(-1):这一句.但是只在安卓手机有效果,兼容苹果手机需要在跳转代码后加上return false:这句.跳转 ...