PID参数
大家奉上一篇关于PID算法及参数整定的知识!
1.位置表达式
位置式表达式是指任一时刻PID控制器输出的调节量的表达式。
PID控制的表达式为
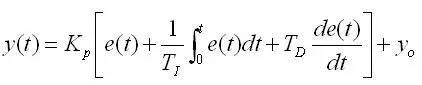
式中的y(t)为时刻t控制器输出的控制量,式中的y(0)为被控制量没有偏差时控制器输出的控制量。
由于计算机进入了控制领域。人们将模拟PID控制规律引入到计算机中来。由于计算机控制是一种采样控制,它只能根据采样许可的偏差计算控制量,而不能象模拟控制那样连续输出控制量,进行连续控制。由于这一特点,上面公式中的积分和微分项不能直接使用,必须进行离散化处理。离散化处理的方法为:以T作为采样周期,k作为采样序号,则离散采样时间kT对应着连续时间 t,用求和的形式代替积分,用增量的形式代替微分,可作如下近似变换:
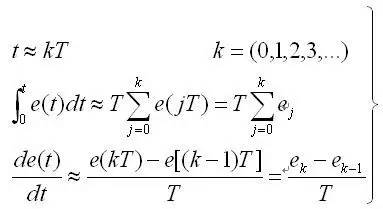
上式中,为了表示方便,将类似于e(kT)简化成ek 形式就可以得到离散的PID表达式:

或写成

此公式即为位置式的PID表达式。
式中:k——采样序号,k=0,1,2,…
yk ——第k 次采样时刻的计算机输出值
e k ——第k 次采样时刻输入的偏差值
e k −1 ——第k-1 次采样时刻输入的偏差值
K I ——积分系数。K I =KP*T/TI
积分时间TI即为累积多少次/个T)
KD ——微分系数。K D =KP*TD /T
如果采样周期取得足够小,则以上近似计算可获得足够精确的结果,离散控制过程与连续控制过程十分接近。
2.增量式表达式
利用上面的公式,可得出第k次采样、第k-1次采样时的输出调节量yk、yk-1,用yk-yk-1,即得增量式PID表达式,如下:
3.PID参数的工程整定方法
参数整定的方法很多,我们只介绍几种工程上最常用的方法。最实用的是试凑法。
1)临界比例度法
这是目前使用较广的一种方法,具体作法如下:
先在纯比例作用下(把积分时间放到最大,微分时间放到零),在闭合的调节系统中,从大到小地逐渐地改变调节器的比例度,就会得到一个临界振荡过程,如图8所示。这时的比例度叫临界比例度δk,周期为临界振荡周期Tk。记下δk和Tk,然后按表1的经验公式来确定调节器的各参数值。
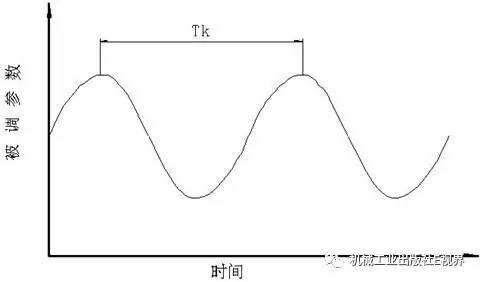

表1 临界比例度法数据表

这种方法在下面两种情况下不宜采用:
a)临界比例度过小,因为这时候调节阀很容易处于全开及全关位置,对于工艺生产不利,举例来说,对于一个用燃料油(或瓦斯)加热的炉子,如δ很小,接近双位调节,将一会儿熄火,一会儿烟囱浓烟直冲。
b)工艺上约束条件较严格时,因为这时候如达到等幅振荡,将影响生产的安全运行。
2)衰减曲线法
临界比例度法是要系统等幅振荡,还要多次试凑,而用衰减曲线法较简单,一般又有两种方法。
(1)4:1衰减曲线法
使系统处于纯比例作用下,在达到稳定时,用改变给定值的办法加入阶跃干扰,观察记录曲线的衰减比,然后逐渐从大到小改变比例度,使出现4:1的衰减比为止,如下图所示。记下此时的比例度δs和Ts的值,再按表2的经验公式来确定PID数值。
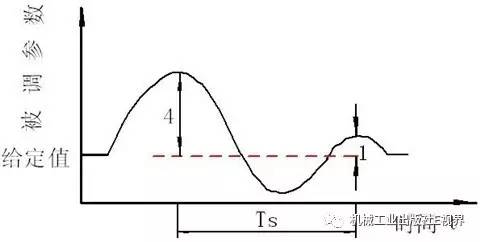
表2 4:1衰减曲线法数据表

(2)10:1衰减曲线法
有的过程,4:1衰减仍嫌振荡过强,可采用10:1衰减曲线法。方法同上,得到10:1衰减曲线,记下此时的比例度δ's和上升时间T's,再按表3的经验公式来确定PID的数值。衰减曲线如下图所示。
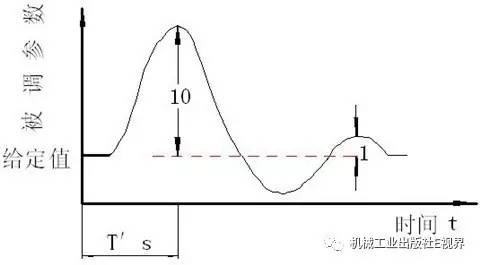
表3 10:1衰减曲线法数据表

采用衰减曲线法必须注意几点:
a)加给定干扰不能太大,要根据生产操作要求来定,一般在5%左右,也有例外的情况。
b)必须在工艺参数稳定的情况下才能加给定干扰,否则得不到正确得δs、Ts、或δ's和T's值。
c)对于反应快的系统,如流量、管道压力和小容量的液位调节等,要在记录纸上严格得到4:1衰减曲线较困难,一般以被调参数来回波动两次达到稳定,就近似地认为达到4:1衰减过程了。
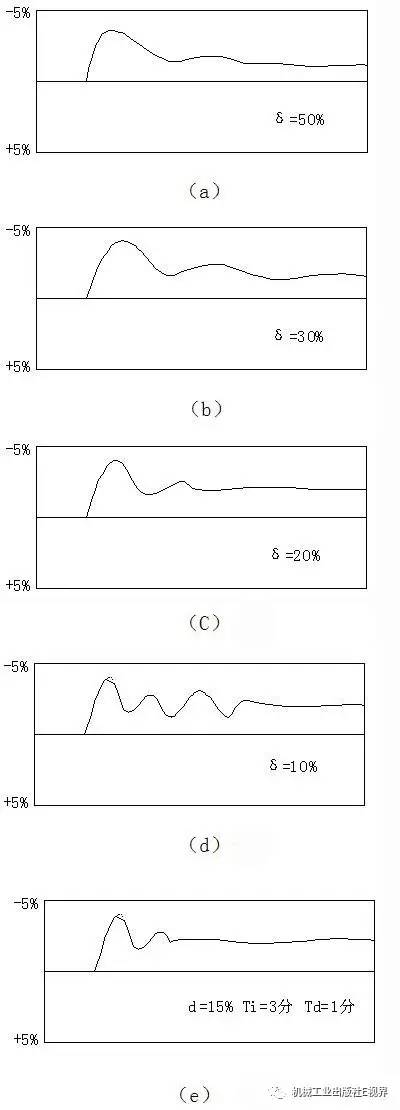
下面举一个现场整定的例子。在某塔顶温度调节系统中,被调参数是塔顶温度,工艺允许波动为<4℃,调节参数是回流量。在整定过程中,考虑到对象滞后较大,反应较慢的情况,δ的选择从50%开始凑试起,此时在阶跃作用下(给定值降低2%)的过渡过程曲线见下图(a)。此时调节时间长,不起振荡,于是将比例度减少,δ=30%、20%、及10%时的曲线见(b)、(c)、(d)。显然,20%的情况最好,衰减比接近4:1,Ts=10分。
按4:1衰减曲线法数据表定出整定参数:
δ=0.8·δs=16%;
Ti=0.3·Ts=3分;
Td=0.1·Ts=1分。
投运时,先将δ放在较大的数值,把Ti从大减少到3分,把Td从小到大逐步放大到1分,然后把δ拉到15%,(如果在δ=15%的条件下很快地把Td放到1分,调节器的输出会剧烈变化)。再对系统加2% 的给定值变化时,仍产生4:1衰减过程,见图(e)所示,调节质量显著改善,超调量小于1℃,调节时间为6.5分。
3)经验试凑法
这是在生产实践中所总结出来的方法,目前应用最为广泛,其步骤简述如下:
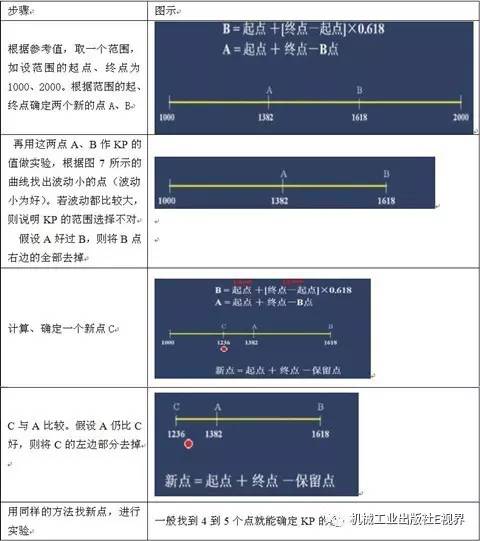
(1)确定KP
可用“优选法”,详见下表
表4 优选法确定KP
(2)看曲线,调参数,根据操作经验,看曲线的形状,直接在闭合的调节系统中逐步反复试凑,一直得到满意数据。
在实践中,把具体整定的方法总结了几段顺口溜:
参数整定找最佳,从大到小顺次查,
先是比例后积分,最后才把微分加;
曲线振荡很频繁,比例度值要放大, //比例度放大即比例系数KP要减小。
曲线漂浮绕大弯,比例度值应减小;
曲线偏离回复慢,积分时间往下降,
曲线振荡周期长,积分时间再加长;
曲线振荡频率快,先把微分降下来,
动差大来波动慢,微分时间应加长;
理想曲线两个波,前高后低四比一,
一看二调多分析,调节质量不会低。
第一段讲的是整定顺序,δ和Ti都是从大到小逐步加上去,微分是最后才考虑的。第二段讲的是比例度如何整定。第三段讲的是积分时间如何整定。第四段讲的是微分时间如何整定。第五段讲的是标准。
上面这种方法步骤是先加δ,再加Ti,最后才加Td。应用中较稳妥。
另一种方法是先从表列范围内取Ti的某个数值,如果需要微分,则取Td=(1/3~1/4)Ti,然后对δ进行试凑,也能较快地达到要求。
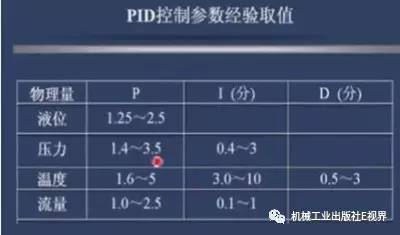
常用PID控制参数的经验值如下图所示。
PID参数的更多相关文章
- PID参数整定快速入门(调节器参数整定方法)
PID调节器参数整定方法很多,常见的工程整定方法有临界比例度法.衰减曲线法和经验法.云润仪表以图文形式分别介绍调节器参数整定方法. 临界比例度法一个调节系统,在阶跃干扰作用下,出现既不发散也不衰减的等 ...
- PID控制最通俗的解释与PID参数的整定方法
转自->这里 PID是比例.积分.微分的简称,PID控制的难点不是编程,而是控制器的参数整定.参数整定的关键是正确地理解各参数的物理意义,PID控制的原理可以用人对炉温的手动控制来理解.阅读本文 ...
- 我的四轴专用PID参数整定方法及原理---超长文慎入(转)
给四轴调了好久的PID,总算是调好了,现分享PID参数整定的心得给大家,还请大家喷的时候手下留情. 首先说明一下,这篇文章的主旨并不是直接教你怎么调,而是告诉你这么调有什么道理,还要告诉大家为什么'只 ...
- PID参数调整的口诀
PID参数调整的口诀:参数整定找最佳,从小到大顺序查先是比例后积分,最后再把微分加曲线振荡很频繁,比例度盘要放大曲线漂浮绕大湾,比例度盘往小扳曲线偏离回复慢,积分时间往下降曲线波动周期长,积分时间再加 ...
- PID参数整定
PID参数整定方法很多,常见的工程整定方法有临界比例度法.衰减曲线法和经验法.云南昌晖仪表制造有限公司以图文形式介绍以临界比例度法和衰减曲线法整定调节器PID参数方法.临界比例度法一个调节系统,在阶跃 ...
- 增量式pid和位置式PID参数整定过程对比
//增量式PID float IncPIDCalc(PID_Typedef* PIDx,float SetValue,float MeaValue)//err»ý·Ö·ÖÀë³£Êý { PIDx-& ...
- PID参数调节口诀
参数整定找最佳, 从小到大顺序查. 先是比例后积分, 最后再把微分加. 曲线振荡很频繁, 比例度盘要放大. 曲线漂浮绕大弯, 比例度盘往小扳. 曲线偏离回复慢, 积分时间往下降. 曲线波动周期长, 积 ...
- pid参数调节的几句话
如果参数上升太快,降低Kp值,如果震荡太剧烈(振荡幅度过大),降低Ki值,如果曲线震荡部分上升下降太快则尝试调整Kd值.
- SLAM+语音机器人DIY系列:(四)差分底盘设计——5.底盘PID控制参数整定
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达.IMU.麦克风.音响.摄像头这些通用部件可以直接买到,很难买到通用的底盘.一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的:另一方面是因为 ...
随机推荐
- 字符串转成KB,MB, GB
import java.text.DecimalFormat; public class SizeUtil { public static String GetImageSize(String ima ...
- 大话数据结构.epub
电子书资源:大话数据结构 书籍简介 本书为超级畅销书<大话设计模式>作者程杰潜心三年推出的扛鼎之作!通篇以一种趣味方式来叙述,大量引用了各种各样的生活知识来类比,并充分运用图形语言来体 ...
- Java程序设计基础第4章习题与自总
怎么说呢?不论什么编程题,都有很多种方法解决问题,最后能解决我们所提出的问题才是关键的东西,也是未来成为工程师所需要的能力.解决问题是关键, 当我们做好了问题解决的关键途径的时候,如果有着profou ...
- 手把手教你搭建自己的Angular组件库 - DevUI
摘要:DevUI 是一款面向企业中后台产品的开源前端解决方案,它倡导沉浸.灵活.至简的设计价值观,提倡设计者为真实的需求服务,为多数人的设计,拒绝哗众取宠.取悦眼球的设计.如果你正在开发 ToB 的工 ...
- 持续集成 简介&环境搭建
1. 持续集成简介 2. 持续集成环境搭建(Jenkins) 2.1 Git 安装 2.2 JDK 1.8 安装 2.3 Tomcat 安装 2.4 Maven 简介和安装 2.5 Jenkins 安 ...
- Java集合原理分析和知识点大杂烩(多图初学者必备!!)
一.数据结构 数据结构就是计算机存储.组织数据的方式. 在计算机科学中,算法的时间复杂度是一个函数,它定性描述了该算法的运行时间,常用O符号来表述. 时间复杂度是同一问题可用不同算法解决, ...
- Manachar's Algorithm
1.模板 1 #include<bits/stdc++.h> 2 using namespace std; 3 const int MAX=21000020; 4 char s[MAX], ...
- F - Lakes in Berland(BFS)
The map of Berland is a rectangle of the size n × m, which consists of cells of size 1 × 1. Each cel ...
- Python容器数据类型之间的转换
强制转换成字符串 str() 将列表(list)转为字符串 var1 = [1, 2, 3, 4] var2 = str(var1) print(type(var2)) # <class 'st ...
- C/C++ 介绍的PE文件遍历工具
在前面的笔记中,我总结了Pe结构的一些结构含义,并手动编写了几段PE结构遍历代码,这里我直接把之前的C语言代码进行了封装,形成了一个命令行版的PE文件查看工具,该工具只有20kb,但却可以遍历出大部分 ...