基于RYU的拓扑发现
基于RYU的拓扑发现
前言
本次实验是一个基于RYU的拓扑发现功能。参考了呈神的实现方式,并加了一些自己实现方式,做了一些数据结构的改动。
数据结构
link_to_port 字典
有两种关系:
一是记录交换机与交换机之间的链接 (src_dpid, src_port_no) => (dst_dpid, dst_port_no)
一是记录交换机与控制器之间的链接 (dpid, port_no) =>(mac, ip)
host_or_switch 字典
用来记录交换机连的端口连接的为何种类型的设备 (dpid, port_no) =>
1:交换机
2:主机
其他:没有连接
switch_port_table 字段
用来记录交换机的端口 , (dpid) => [1,2,....]
相关API的使用
API是基于ryu源代码topology/switches下的使用,并使用了三个api
- get_switch 获取交换机列表
- get_link 获取链路信息
- get_host 获取主机信息
实验代码
#-*- coding: UTF-8 -*-
import logging
from ryu.base import app_manager
from ryu.controller import ofp_event
from ryu.controller.handler import MAIN_DISPATCHER, DEAD_DISPATCHER
from ryu.controller.handler import CONFIG_DISPATCHER
from ryu.controller.handler import set_ev_cls
from ryu.ofproto import ofproto_v1_0
from ryu.ofproto import ofproto_v1_2
from ryu.ofproto import ofproto_v1_3
from ryu.lib.packet import packet
from ryu.lib import hub
from ryu.topology import event, switches
from ryu.topology.api import get_switch, get_link, get_host
from ryu import cfg
CONF = cfg.CONF
class test_wpq(app_manager.RyuApp):
OFP_VERSIONS = [ofproto_v1_0.OFP_VERSION,
ofproto_v1_3.OFP_VERSION]
def __init__(self, *args, **kwargs):
super(test_wpq, self).__init__(*args, **kwargs)
self.topology_api_app = self
self.link_to_port = {}
self.host_or_switch = {}
self.switch_port_table = {}
self.name = "wpq"
self.discover_thread = hub.spawn(self._discover_links)
#A thread to output the information of topology
def _discover_links(self):
while True:
self.get_topology(None)
try:
self.show_topology()
except Exception as err:
print "please input pingall in mininet and wait a memment"
hub.sleep(5)
#add entry of table-miss
@set_ev_cls(ofp_event.EventOFPSwitchFeatures, CONFIG_DISPATCHER)
def switch_feature_handle(self, ev):
msg = ev.msg
print msg
datapath = msg.datapath
ofproto = datapath.ofproto
parser = datapath.ofproto_parser
self.logger.info("switch %s is connected", datapath.id)
match = parser.OFPMatch()
actions = [parser.OFPActionOutput(ofproto.OFPP_CONTROLLER)]
self.add_flow(datapath=datapath, priority=0, actions=actions, match=match)
def add_flow(self, datapath, priority, actions, match, idle_timeout=0, hard_timeout=0):
ofp = datapath.ofproto
parser = datapath.ofproto_parser
inst = [parser.OFPInstructionActions(ofp.OFPIT_APPLY_ACTIONS,
actions)]
mod = parser.OFPFlowMod(datapath=datapath, priority=priority,
idle_timeout=idle_timeout,
hard_timeout=hard_timeout,
match=match, instructions=inst)
datapath.send_msg(mod)
#fill the port of switch imformation
def create_map(self, switch_list):
for sw in switch_list:
dpid = sw.dp.id
self.switch_port_table.setdefault(dpid, set())
for p in sw.ports:
self.switch_port_table[dpid].add(p.port_no)
# print "--------------交换机端口情况---------------"
# print self.switch_port_table
#fill the link information
def create_link_port(self, link_list, host_list):
for link in link_list:
src = link.src
dst = link.dst
self.link_to_port[(src.dpid, src.port_no)] = (dst.dpid, dst.port_no)
self.link_to_port[(dst.dpid, dst.port_no)] = (src.dpid, src.port_no)
self.host_or_switch[(src.dpid, src.port_no)] = 1
self.host_or_switch[(dst.dpid, dst.port_no)] = 1
for host in host_list:
port = host.port
self.link_to_port[(port.dpid, port.port_no)] = (host.mac, host.ipv4)
self.host_or_switch[(port.dpid, port.port_no)] = 2
#packein message handler (it is useless in this function)
@set_ev_cls(ofp_event.EventOFPPacketIn, MAIN_DISPATCHER)
def packetin_handler(self, ev):
# print ev.msg
msg = ev.msg
pkt = packet.Packet(msg.data)
# print pkt.get_protocols
dpid = msg.datapath.id
port = msg.match['in_port']
self.get_topology(None)
events = [event.EventSwitchEnter,
event.EventSwitchLeave, event.EventPortAdd,
event.EventPortDelete, event.EventPortModify,
event.EventLinkAdd, event.EventLinkDelete]
#monitor the change in link information
@set_ev_cls(events)
def get_topology(self, ev):
self.create_map(get_switch(self.topology_api_app))
# print get_host(self.topology_api_app)
# print type(get_host(self.topology_api_app))
self.create_link_port(get_link(self.topology_api_app), get_host(self.topology_api_app))
# self.show_topology()
#some command line output typesetting
def show_topology(self):
i = 1
print ""
print ""
print ""
print "----------------" * 2, "physical topology", "----------------" * 6
for dpid in self.switch_port_table.keys():
print "switch%d ----------dpid---------- " % i,
for port_no in self.switch_port_table[dpid]:
print "-----------port %s-----------" % port_no,
print ""
print " ", "%11d" % dpid ,"%12s" % " ",
# # print self.switch_port_table[dpid]
try:
for port_no in self.switch_port_table[dpid]:
if self.host_or_switch[(dpid, port_no)] == 1:
print "%10s" % "switch", "%d" % self.link_to_port[(dpid, port_no)][0], " port %d" % self.link_to_port[(dpid, port_no)][1], " ",
elif self.host_or_switch[(dpid, port_no)] == 2:
print "%s" % "host", "mac: %s" % self.link_to_port[(dpid, port_no)][0],
else:
print "%28s" % "None"
print ""
print " ", "%23s" % " ",
for port_no in self.switch_port_table[dpid]:
if self.host_or_switch[(dpid, port_no)] == 2:
print " ipv4 :", self.link_to_port[(dpid, port_no)][1],
else:
print "%28s" % " ",
print
except Exception as error:
print "please input pingall in mininet and wait a momment until it's finished"
i = i + 1
print "------------------" * 8
print ""
print ""
print ""
细节点
这也是我调了半天的一个bug,使用hub.spawn与hub.sleep配合的函数,应该可以达到停几秒休息一次的作用,尝试很多无果,后来自己随便建了一个没有消息处理机制的函数进行测试,发现其却能正常运行。究其原因,后面原来是自己没有异常处理。异常处理很重要!!!
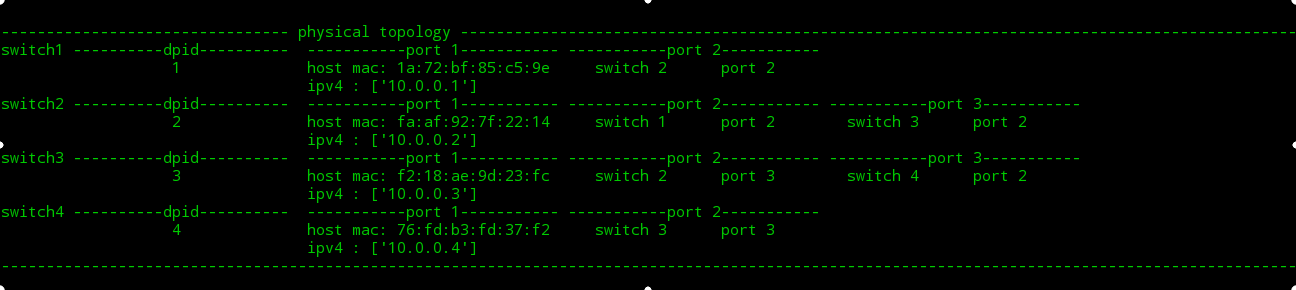
实验效果图
实验缺陷
对于不同的终端可能适配不一样,尽量放大到全屏看的比较直观,如果设备多了,这个显示依然是一片模糊,后期将加入一个做成json,做成web可视化
实验总结
这个程序有一大部分得感谢呈神的参考,还有其他部分也是自己对python的一些类似循环,字典的一些应用,懂得去debug,对python不会那么陌生。
基于RYU的拓扑发现的更多相关文章
- 基于SNMP的路由拓扑发现算法收集
一.三层(网络层)发现 算法来源:王娟娟.基于SNMP的网络拓扑发现算法研究.武汉科技大学硕士学位论文,2008 数据结构: 待检路由设备网关链表:存放指定深度内待检路由设备的网关信息,处理后删除. ...
- OpenFlow 1.3 控制器与交换机的交互,以及拓扑发现
前言 最近纠结于控制器如何发现拓扑,于是就翻起了OpenFlow 1.3进行查看,以及一些相关协议 OF 1.3 安全通道,即交互消息 OpenFlow Switch Specification 1. ...
- 提高SDN控制器拓扑发现性能
原文由我发表在sdnlab.com.原文链接:http://www.sdnlab.com/15425.html SDN网络的一大特点就是资源由控制器集中管理,控制器管理网络,最基本的当然需要知道网络的 ...
- 基于Ryu REST API的VLAN实现
目录 0.预备知识 1.实验内容 2.编写脚本addflow.sh一步实现流表下发 3.使用api查看流表 4.实验结果 0.预备知识 ryu控制器的API文档:ryu.app.ofctl_rest ...
- 两款商业拓扑发现软件siteview和ElementSentry的比较
今天在公司试用了一下两款商业拓扑发现软件游龙科技的siteview和速方软件ElementSentry. 条目/产品 速方软件ElementSentryv5.0 游龙科技Siteview NNM v3 ...
- prometheus 基于DNS的目标发现
prometheus 基于DNS的目标发现 DNS服务发现依赖于查询A.AAAA或SRV DNS记录. 1.基于 SRV 记录发现 scrape_configs: - job_name: 'webap ...
- prometheus — 基于文件的服务发现
基于文件的服务发现方式不需要依赖其他平台与第三方服务,用户只需将要新的target信息以yaml或json文件格式添加到target文件中 ,prometheus会定期从指定文件中读取target信息 ...
- prometheus 基于文件的目标发现
prometheus 基于文件的目标发现 1.创建目录 cd /usr/local/prometheus/conf mkdir -pv targets/{nodes,docker} 2.修改prome ...
- 基于Ryu的服务器实现及相关请求访问处理
基于Ryu的服务器实现及相关请求访问处理 前言及问题描述 近期又遇到了一个非常棘手的问题,由于Ryu是通过Python语言开发的,通过Ryu的wsgi的方式建立服务器,无法解析PHP,通过多次方法解决 ...
随机推荐
- JavaScript中的单例模式
单例模式 在JavaScript中,单例(Singleton)模式是最基本又最有用的模式之一.这种模式提供了一种将代码组织为一个逻辑单元的手段,这个逻辑单元中的代码可以通过单一的变量进行访问.确保单例 ...
- Python3 常见数据类型的转换
Python3 常见数据类型的转换 一.数据类型的转换,你只需要将数据类型作为函数名即可 OCP培训说明连接:https://mp.weixin.qq.com/s/2cymJ4xiBPtTaHu16H ...
- jQuery的extend和fn.extend理解
参考网址:http://www.cnblogs.com/yuanyuan/archive/2011/02/23/1963287.html http://www.cnblogs.com/xuxiuyu/ ...
- 转自《https安全链接的配置教程:startSSl免费证书申请与nginx的https支持配置》
一.什么是 SSL 证书,什么是 HTTPS 网站? SSL证书是数字证书的一种,类似于驾驶证.护照和营业执照的电子副本.SSL证书通过在客户端浏览器和Web服务器之间建立一条SSL安全通道(Secu ...
- Android之基于小米天气的天气源库
大概去年的这个时候,有跟大家分享简洁天气这个应用. 该应用一開始使用的是中国天气网的数据,可是,由于须要反复多次请求server获取信息才干满足我们的需求,因此.后来我偷偷的将天气源更换成" ...
- Spring Boot和Dubbo整合
provider端 POM依赖 <dependencies> <dependency> <groupId>org.springframework.boot</ ...
- SAP函数 LAST_DAY_OF_MONTHS 获取月末最后一天日期
DATA LAST_DATE TYPE SY-DATUM. CALL FUNCTION 'LAST_DAY_OF_MONTHS' EXPORTING day_in = sy-datum IMPORTI ...
- 大数据入门第二十三天——SparkSQL(二)结合hive
一.SparkSQL结合hive 1.首先通过官网查看与hive匹配的版本 这里可以看到是1.2.1 2.与hive结合 spark可以通过读取hive的元数据来兼容hive,读取hive的表数据,然 ...
- go语言之行--结构体(struct)详解、链表
一.struct简介 go语言中没有像类的概念,但是可以通过结构体struct实现oop(面向对象编程).struct的成员(也叫属性或字段)可以是任何类型,如普通类型.复合类型.函数.map.int ...
- go语言之行--基础部分
一.数据类型 布尔型 布尔类型 - 由两个预定义常量组成:true.false,默认值为false package main import "fmt" func main() { ...