[Micropython]TPYBoard v102 DIY照相机
摄像头(CAMERA或WEBCAM)又称为电脑相机、电脑眼、电子眼等,是一种视频输入设备,被广泛的运用于视频会议,安防系统 、图像采集系统、 环境监控 、工业现场过程控制 等方面。本实验用TPYBoard v102以及PTC06 串口摄像头模块DIY一个简易的照相机。

1.所用器材:
l TPYBoard v102 1块
l PTC06 串口摄像头模块1个
l 杜邦线若干
l TF卡1个
l 下载数据线1条
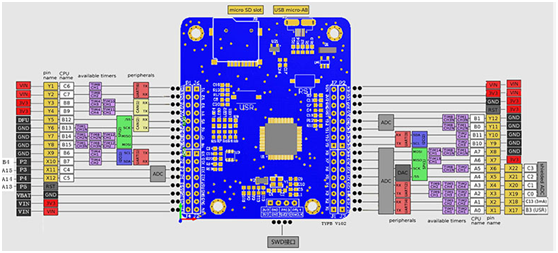
2.TPYBoard v102简介:
TPYBoardv102主控芯片采用STM32F405,M4的内核,168MHZ的最高运行速度,1024KB的Flash,192KB的RAM,内置SD卡槽,最大支持8G内存的内存卡。板载四个LED灯和一个加速度传感器。TPYBoard v102板载30个通用GPIO接口、 2个SPI接口、2个CAN接口、2个I2C接口、 5个USART 接口、 2个ADC接口(精度12bit )、2个DAC接口、1个SWD接口。可与大部分常用传感器模块连接。
3. PTC06 串口摄像头模块简介:
PTC06 串口摄像头模块是一款集图像采集、拍摄控制、数据压缩、串口传输于一体的工业级图像采集处理模块。其内置的高性能数字信号处理芯片实现了对原始图像的高比例压缩。产品图像输 出采用标准 JPEG 格式,可方便地兼容各种图像处理软件;采用 3 线制 TTL 电平 UART 通 信接口,可以方便地实现与单片机或其他微处理器连接。
默认波特率为 115200,其它可选波特率有 9600,19200,38400 和 57600。
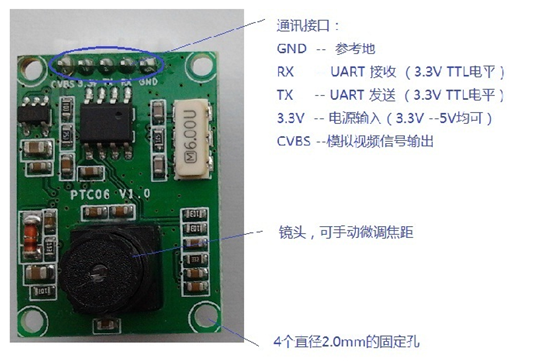
其中对于串口控制拍照,读取静态图片的应用中,只需要用到 GND,RX,TX,VCC 这 4 个信号线。 如果是要输出模拟视频的应用,才需要将 CVBS 信号。注意: TX 和 RX 是 3.3v 的 TTL 电平信号。
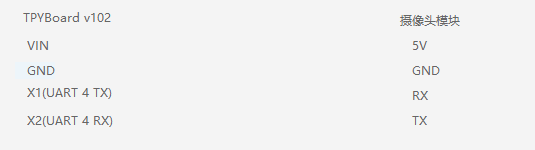
4.接线方式:
5.实验步骤.
基本原理:TPYboard v102 通过串口与串口摄像头模块(PTC06)进行连接,通过按键控制模块进行拍照,并保存到TF卡中。上电后,等待ToyBoard v102板载绿灯亮起,说明摄像头模块初始化完毕,按一下USR键,控制摄像头进行拍照,蓝灯会闪烁,说明正在传输图片数据,等待蓝灯熄灭后,说明传输完毕。按一下rst键让板子重新加载一下TF卡,打开TF卡就会看到一个新生成的jpeg文件。
6.源代码:
"""
#TPYBoard v102 驱动串口摄像头PTC06 拍照并保存到TF卡
#------------------------------------------------------
#作者:山东萝卜电子科技有限公司
#时间:2018年03月15日
""" import pyb
from pyb import UART,Switch """
拍照的基本流程
--------------------
1.清空图片缓存
2.发送拍照命令
3.获取图片的长度
4.根据长度读取图片数据 使用到的指令与返回的数据格式
-------------------------------
复位
0x56 0x00 0x26 0x00
返回
0x76 0x00 0x26 0x00 +DSP 版本信息+Init end
------------------------
清空图片缓存
0x56 0x00 0x36 0x01 0x02
返回
0x76 0x00 0x36 0x00 0x00
-------------------------
拍照命令
0x56 0x00 0x36 0x01 0x00
返回
0x76 0x00 0x36 0x00 0x00
--------------------------
读所拍图片的长度
56 00 34 01 00
返回
0x76 0x00 0x34 0x00 0x04 0x00 0x00 XX YY
(XX 为高位字节,YY 为低位字节)
--------------------------
读取图片数据
0x56 0x00 0x32 0x0C 0x00 0x0A 0x00 0x00 AA BB 0x00 0x00 XX YY 0x00 0xFF
AA BB:起始地址(先高位字节,后低位字节.必须是8的倍数)
XX YY:本次读的数据长度(先高位字节,后低位字节)
返回
76 00 32 00 00 FF D8 ....... FF D9 76 00 32 00 00
(完整的JPEG 图片文件是以 FF D8 开始 FF D9 结尾)
"""
#-----Command---------#
initcmd=b'\x56\x00\x26\x00' #复位指令
clearcmd=b'\x56\x00\x36\x01\x02' #清除缓存
photocmd=b'\x56\x00\x36\x01\x00' #拍照
lengthcmd=b'\x56\x00\x34\x01\x00' #获取图片长度
readcmd=b'\x56\x00\x32\x0C\x00\x0A\x00\x00' #获取图片数据
responseCmd=b'\x76\x00\x32\x00\x00'#返回的图片数据固定头和尾
#---------------------------------#
isFlag=0#标识是否初始化
isPhoto=0#标识是否发送拍照命令
num=1
f_name='/sd/photo%s.jpeg'#保存的文件名称
nBytes=512#每次读取的字节数
#---------------------------------#
uart=UART(4,115200,timeout=100)#串口4 TX-X1 RX-X2 #------将10进制转为16进制字节数组--------#
def convert_Data(num):
if num>255:
num_h=hex(num)
if len(num_h)<6:
num_h_a=num_h[:3]
num_h_b='0x'+num_h[3:]
else:
num_h_a=num_h[:4]
num_h_b='0x'+num_h[4:]
byte_num=bytes([int(num_h_a,16),int(num_h_b,16)])
else:
byte_num=b'\x00'+bytes([num])
return byte_num
#---------------------------------
#函数名:get_photo
#描述:获取图片数据
#参数:起始地址、读取长度
#返回:成功返回正常数据,失败返回0
#---------------------------------/
def get_photo(add,readlen):
global readcmd,responseCmd cmd=readcmd+add+b'\x00\x00'+readlen+b'\x00\xFF'
uart.write(cmd)
while uart.any()<=0:
continue
data=uart.read()
#print('data:',data)
#print('data[0:5]:',data[0:5])
#print('data[-5:]:',data[-5:])
if data[0:5]==responseCmd and data[-5:]==responseCmd:
revdata=data[5:-5]
print('revdata:',revdata)
else:
revdata=0
return revdata
#---------------------------------
#函数名:test
#描述:USR按键的回调函数。
#按键每按1次拍照1次
#---------------------------------/
def test():
global num,isPhoto
pyb.delay(30)
if(sw()):
sw.callback(None)#正在获取数据时 禁用回调
isPhoto=0
num+=1
pyb.LED(3).on()
#清除缓存
uart.write(clearcmd)
#等待模块上电完毕
print('wait......')
pyb.delay(2800)
print('init start.......')
uart.write(initcmd)
sw=Switch()
sw.callback(test)
while True:
if uart.any()>0:
data=uart.read()
print('revdata:',data)
if isFlag==0:
#说明接收的是复位后的信息
if data==b'Init end\r\n':
#复位完毕
print('init ok.......')
pyb.delay(2000)
isFlag=1
pyb.LED(2).on()
else:
if len(data)>=5:
if data[0]==118:#0x76
if data[2]==54:#0x36
if isPhoto==0:
#清除缓存返回
print('-----clear buffer ok----')
isPhoto=1
uart.write(photocmd)
else:
#拍照返回
print('-----taking pictures ok----')
uart.write(lengthcmd)
if data[2]==52:#0x34
print('photo length:',data[7],'-',data[8])
tlen=data[7]*256+data[8]
t_c=tlen//nBytes
t_y=tlen%nBytes
add=0
#256=[0x01,0x00] 512=[0x02,0x00]
length=convert_Data(nBytes)
name=f_name % str(num)
print('filename:',name)
for i in range(0,t_c):
add=convert_Data(i*nBytes)
#每512字节写一次
revdata=get_photo(add,length)
if revdata!=0:
f=open(name,'a')
f.write(revdata)
f.close()
pyb.LED(4).toggle()
print('-------------',i)
pyb.delay(100)
add=convert_Data(t_c*nBytes)
revdata=get_photo(add,convert_Data(t_y))
if revdata!=0:
f=open(name,'a')
f.write(revdata)
f.close()
pyb.LED(3).off()
pyb.LED(4).off()
pyb.delay(100)
print('*========================================*')
sw.callback(test)
else:
print('-----data length error-----')
[Micropython]TPYBoard v102 DIY照相机的更多相关文章
- TPYBoard v102 DIY照相机(视频和制作流程)
前段时间的帖子,利用TPYBoard v102做的DIY照相机,周末实物终于做出来了,加了两个按键模块和一个5110,做的有点糙啊----望大家勿怪,哈哈哈.拍出来图片还算清晰,串口摄像头模块用的30 ...
- MicroPython TPYBoard v102 无线红外遥控舵机(基于红外解/编码模块)
转载请注明文章来源,更多教程可自助参考docs.tpyboard.com,QQ技术交流群:157816561,公众号:MicroPython玩家汇 红外解码/编码模块介绍 模块上搭载了红外接收头.红外 ...
- [MicroPython]TPYBoard v102炫彩跑马灯WS2812B
一.实验目的 了解ws2812b的工作原理 学习ws2812b的驱动方法 二.实验器材 TPYBoard v102 1块 ws2812b RGB-Ring-8 1个 micro USB数据线 1条 杜 ...
- Micropython TPYBoard v102 温湿度短信通知器(基于SIM900A模块)
前言 前段时间看了追龙2,感受就是如果你是冲着追龙1来看追龙2的话,劝你还是不要看了,因为追龙2跟追龙1压根没什么联系,给我的感觉就像是看拆弹专家似的,估计追龙2这个名字就是随便蹭蹭追龙1的热度来的. ...
- MicroPython之TPYBoard v102开发板控制OLED显示中文
转载请以链接形式注明文章来源,公众号:MicroPython玩家汇 0x00前言 之前看到一篇文章是关于TPYBoardv102控制OLED屏显示的,看到之后就想尝试一下使用OLED屏来显示中文.最近 ...
- MicroPython开发板:TPYBoard v102 播放音乐实例
0x00前言 前段时间看到TPYBoard的技术交流群(群号:157816561,)里有人问关于TPYBoard播放音乐的问题.最近抽空看了一下文档介绍,着手做了个实验.更多MicroPython的教 ...
- [TPYBoard - Micropython 之会python就能做硬件 9] 五分种学会用TPYBoard V102 制作避障小车(升级版)
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 感谢山东萝卜电子科技公司授权 一.实验器材 1.TPYboard V102板 ...
- MicroPython教程之TPYBoard v102 CAN总线通信
0x00前言 CAN是控制器局域网络(ControllerAreaNetwork,CAN)的简称,是ISO国际标准化的串行通信协议.CAN总线结构简单,只需2根线与外部相连,并且内部集成了错误探测和管 ...
- [MicroPython]TPYBoard开发板DIY小型家庭气象站
对于喜欢登山的人来说,都会非常关心自己所处的高度跟温度,海拔高度的测量方法,海拔测量一般常用的有两种方式,一是通过GPS全球定位系统,二是通过测出大气压,根据气压值算出海拔高度. BMP180是一直常 ...
随机推荐
- 洛谷P4492 [HAOI2018]苹果树(组合数)
题意 题目链接 Sol 有点自闭,.我好像对组合数一窍不通(~~~~) Orz shadowice // luogu-judger-enable-o2 #include<bits/stdc++. ...
- react 的双向数据绑定
学习过angular和vue的人都知道,它俩在实现双向数据绑定都是有一个专门的内置指令ngModel和v-model 但是在react中没有这些. 所以我们在react中想要实现双向数据绑定要调用一个 ...
- WPF:自定义Metro样式文件夹选择对话框FolderBrowserDialog
1.前言 WPF并没有文件选择对话框,要用也就只有使用Winform版的控件.至今我也没有寻找到一个WPF版本的文件选择对话框. 可能是我眼浊,如果各位知道有功能比较健全的WPF版文件选择对话框.文件 ...
- WPF:Metro样式ProgressBar(圆点横向移动),自适应宽度
先看效果图: 最直观的,这是4个圆点在移动,就用一个横向的StackPanel表示这四个点吧. <StackPanel Orientation="Horizontal"> ...
- (网页)swiper.js轮播图插件
Swiper4.x使用方法 1.首先加载插件,需要用到的文件有swiper.min.js和swiper.min.css文件.可下载Swiper文件或使用CDN. <!DOCTYPE html&g ...
- java后台打开浏览器代码
import java.awt.Desktop; import java.io.IOException; import java.net.URI; import java.net.URISyntaxE ...
- Linux 最小化安装后IP的配置(DHCP获取IP地址)
图形化Linux的DHCP好配置,我就不讲了.主要将一下Linux最小化安装后IP的配置: linux最小化安装后没有ifconfig这个命令: yum install net-tools.x86_6 ...
- Objective-C简介
1.OC简介 全称:Objective-C,是扩充C的面向对象编程语言,主要用于iOS和Mac OS开发. C语言的基础上,增加了一层最小的面向对象语法 完全兼容C语言 可以在OC代码中混入C语言代码 ...
- 个人对于 Maven 的理解
个人对于 Maven 的理解 Maven 一直都在使用, 但如果说是不是真的懂 Maven, 很难谈得上. 或许什么时候系统地学习一下, 但在那之前, 打算先记下自己目前对于 Maven 的理解, 之 ...
- xp,windows7,windows8,windows10那个系统好用些
Windows XP:这曾经是微软史上最好的.最受欢迎.最受好评的可以说空前绝后的系统,虽然,XP系统对电脑配置的要求很低,基本现在所有的电脑都支持安装该系统,可它太老旧了,到2014年4-5月份微软 ...