一文读懂PID控制算法(抛弃公式,从原理上真正理解PID控制)
PID(proportion integration differentiation)其实就是指比例,积分,微分控制。先把图片和公式摆出来,看不懂没关系。(一开始看这个算法,公式能看懂,具体怎么用怎么写代码也知道,但是就是不知道原理,不知道为什么要用比例,微分,积分这3个项才能实现最好的控制,用其中两个为什么不行,用了3个项能好在哪里,每一个项各有什么作用)
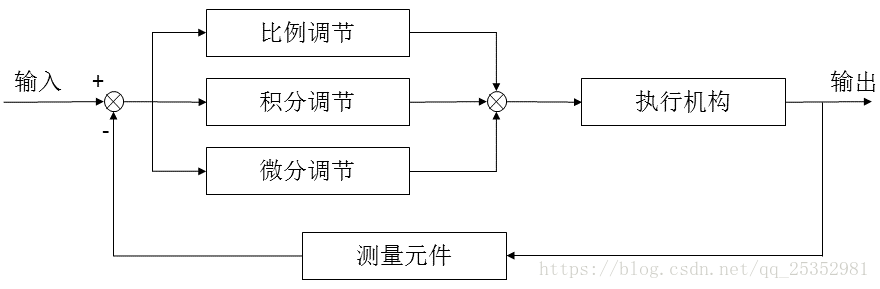

总的来说,当得到系统的输出后,将输出经过比例,积分,微分3种运算方式,叠加到输入中,从而控制系统的行为,下面用一个简单的实例来说明。
u=kp*error
假设kp取0.5,
那么t=1时(表示第1次加水,也就是第一次对系统施加控制),那么u=0.5*0.8=0.4,所以这一次加入的水量会使水位在0.2的基础上上升0.4,达到0.6.
接着,t=2时刻(第2次施加控制),当前水位是0.6,所以error是0.4。u=0.5*0.4=0.2,会使水位再次上升0.2,达到0.8.
如此这么循环下去,就是比例控制算法的运行方法。
可以看到,最终水位会达到我们需要的1米。
但是,单单的比例控制存在着一些不足,其中一点就是 –稳态误差!(我也是看了很多,并且想了好久才想通什么是稳态误差以及为什么有稳态误差)。
像上述的例子,根据kp取值不同,系统最后都会达到1米,不会有稳态误差。但是,考虑另外一种情况,假设这个水缸在加水的过程中,存在漏水的情况,假设每次加水的过程,都会漏掉0.1米高度的水。仍然假设kp取0.5,那么会存在着某种情况,假设经过几次加水,水缸中的水位到0.8时,水位将不会再变换!!!因为,水位为0.8,则误差error=0.2. 所以每次往水缸中加水的量为u=0.5*0.2=0.1.同时,每次加水缸里又会流出去0.1米的水!!!加入的水和流出的水相抵消,水位将不再变化!!
也就是说,我的目标是1米,但是最后系统达到0.8米的水位就不在变化了,且系统已经达到稳定。由此产生的误差就是稳态误差了。
(在实际情况中,这种类似水缸漏水的情况往往更加常见,比如控制汽车运动,摩擦阻力就相当于是“漏水”,控制机械臂、无人机的飞行,各类阻力和消耗都可以理解为本例中的“漏水”)
所以,单独的比例控制,在很多时候并不能满足要求。
u=kp*error+ ki∗∫∗∫error
还是用上面的例子来说明,第一次的误差error是0.8,第二次的误差是0.4,至此,误差的积分(离散情况下积分其实就是做累加),∫∫error=0.8+0.4=1.2. 这个时候的控制量,除了比例的那一部分,还有一部分就是一个系数ki乘以这个积分项。由于这个积分项会将前面若干次的误差进行累计,所以可以很好的消除稳态误差(假设在仅有比例项的情况下,系统卡在稳态误差了,即上例中的0.8,由于加入了积分项的存在,会让输入增大,从而使得水缸的水位可以大于0.8,渐渐到达目标的1.0.)这就是积分项的作用。
微分,说白了在离散情况下,就是error的差值,就是t时刻和t-1时刻error的差,即u=kd*(error(t)-error(t-1)),其中的kd是一个系数项。可以看到,在刹车过程中,因为error是越来越小的,所以这个微分控制项一定是负数,在控制中加入一个负数项,他存在的作用就是为了防止汽车由于刹车不及时而闯过了线。从常识上可以理解,越是靠近停车线,越是应该注意踩刹车,不能让车过线,所以这个微分项的作用,就可以理解为刹车,当车离停车线很近并且车速还很快时,这个微分项的绝对值(实际上是一个负数)就会很大,从而表示应该用力踩刹车才能让车停下来。
切换到上面给水缸加水的例子,就是当发现水缸里的水快要接近1的时候,加入微分项,可以防止给水缸里的水加到超过1米的高度,说白了就是减少控制过程中的震荡。

括号内第一项是比例项,第二项是积分项,第三项是微分项,前面仅仅是一个系数。很多情况下,仅仅需要在离散的时候使用,则控制可以化为


每一项前面都有系数,这些系数都是需要实验中去尝试然后确定的,为了方便起见,将这些系数进行统一一下:

这样看就清晰很多了,且比例,微分,积分每个项前面都有一个系数,且离散化的公式,很适合编程实现。
讲到这里,PID的原理和方法就说完了,剩下的就是实践了。在真正的工程实践中,最难的是如果确定三个项的系数,这就需要大量的实验以及经验来决定了。通过不断的尝试和正确的思考,就能选取合适的系数,实现优良的控制器。
————————————————
版权声明:本文为CSDN博主「确定有穷自动机」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_25352981/article/details/81007075
一文读懂PID控制算法(抛弃公式,从原理上真正理解PID控制)的更多相关文章
- 一文读懂机器学习大杀器XGBoost原理
http://blog.itpub.net/31542119/viewspace-2199549/ XGBoost是boosting算法的其中一种.Boosting算法的思想是将许多弱分类器集成在一起 ...
- 【Java基本功】一文读懂String及其包装类的实现原理
String作为Java中最常用的引用类型,相对来说基本上都比较熟悉,无论在平时的编码过程中还是在笔试面试中,String都很受到青睐,然而,在使用String过程中,又有较多需要注意的细节之处. S ...
- 「Java基本功」一文读懂Java内部类的用法和原理
内部类初探 一.什么是内部类? 内部类是指在一个外部类的内部再定义一个类.内部类作为外部类的一个成员,并且依附于外部类而存在的.内部类可为静态,可用protected和private修饰(而外部类只能 ...
- 一文读懂 SuperEdge 边缘容器架构与原理
前言 superedge是腾讯推出的Kubernetes-native边缘计算管理框架.相比openyurt以及kubeedge,superedge除了具备Kubernetes零侵入以及边缘自治特性, ...
- 一文读懂 深度强化学习算法 A3C (Actor-Critic Algorithm)
一文读懂 深度强化学习算法 A3C (Actor-Critic Algorithm) 2017-12-25 16:29:19 对于 A3C 算法感觉自己总是一知半解,现将其梳理一下,记录在此,也 ...
- 一文读懂对抗生成学习(Generative Adversarial Nets)[GAN]
一文读懂对抗生成学习(Generative Adversarial Nets)[GAN] 0x00 推荐论文 https://arxiv.org/pdf/1406.2661.pdf 0x01什么是ga ...
- 大数据篇:一文读懂@数据仓库(PPT文字版)
大数据篇:一文读懂@数据仓库 1 网络词汇总结 1.1 数据中台 数据中台是聚合和治理跨域数据,将数据抽象封装成服务,提供给前台以业务价值的逻辑概念. 数据中台是一套可持续"让企业的数据用起 ...
- 一文读懂HTTP/2及HTTP/3特性
摘要: 学习 HTTP/2 与 HTTP/3. 前言 HTTP/2 相比于 HTTP/1,可以说是大幅度提高了网页的性能,只需要升级到该协议就可以减少很多之前需要做的性能优化工作,当然兼容问题以及如何 ...
- 一文读懂AI简史:当年各国烧钱许下的愿,有些至今仍未实现
一文读懂AI简史:当年各国烧钱许下的愿,有些至今仍未实现 导读:近日,马云.马化腾.李彦宏等互联网大佬纷纷亮相2018世界人工智能大会,并登台演讲.关于人工智能的现状与未来,他们提出了各自的观点,也引 ...
随机推荐
- TCP为什么要三次握手和四次挥手
http://www.jellythink.com/archives/705 简析TCP的三次握手与四次分手 https://zhuanlan.zhihu.com/p/24001696 计算机网络面试 ...
- Pku2054 Color a Tree
有一个N个结点的有根树,1是这个树的根.现在要对这N个结点依次进行染色,每个结点染色要花费1个单位的时候,同时要满足一个结点仅在其父亲被染色后才可被染色,每个结点有个权值Ci,如果我们在第Ti时间对i ...
- Mac下安装配置gradle
1.下载gradle2.解压3.获得gradle解压后的路径4.修改.bash_profile文件,配置环境变量 vi ~./bash_profile export GRADLE_HOME=/User ...
- [Python3] 015 冰冻集合的内置方法
目录 0. 前言 英文名 元素要求 使用限制 返回 方法数量 1. 如何查看 frozenset() 的内置方法 2. 少废话,上例子 2.1 copy() 2.2 difference() 2.3 ...
- 数组方法之reduce实践
Array.prototype.reduce let arr = [1, 2, 3, 4], sum = arr.reduce((prev, curr, index, arr) => { ret ...
- jsp对象 指令 动作
转载来源:https://blog.csdn.net/u010897406/article/details/49618413 jsp九大内置对象:1>out 向客户端输出数据,字节流.如out. ...
- js中return、return false 、return true各自代表什么含义
return语句代表需要返回一个值,如果不需要就不需要使用return语句.都类似一个出口,return 可以结束方法体中 return后面部分代码的执行.return false 或者 return ...
- Python中yield和return两者之间区别
在任何函数都有返回值,一般都是想到return 关键词,在函数生成器中有个关键词 yield 也可以做返回值,在函数没调用之前,是不会输出任何东西的 1,return 用法 def stu(): re ...
- highcharts控制X刻度值整数调整
function chartData() { var app_id = $('.app_id').attr('app_id'); var gener_id = $('.gener_id').attr( ...
- k3 cloud中获取年月日
日期类型字段元素.Date.Year(获取年) 日期类型字段元素.Date.Month(获取月)日期类型字段元素.Date.Day(获取天)