ZYNQ学习之路1. Linux最小系统构建
https://blog.csdn.net/u010580016/article/details/80430138?utm_source=blogxgwz1
开发环境:window10, vivado 2017.1, ubuntu 16.04, Eclipse+cdt
硬件环境:米尔科技zturn board,zynq7z010
本笔记详细介绍了开发ZYNQ7000系列的基础软件系统构建,介绍了Vivado的使用以及IP核的配置,最后搭建能让ZYNQ运行arm linux系统的软件环境,在今后的开发过程中将在此基础上进行。在完整搭建好本系统之后建议保存为模板工程。
首先简单介绍一下ZYNQ开发linux的基本流程:ZYNQ的开发也是先硬件后软件的方法。具体流程如下:
在Vivado中新建工程,增加一个嵌入式的源文件。
在Vivado里添加和配置PS和PL部分基本的外设,或需要添加自定义的外设。
在Vivado里生成顶层HDL文件,并添加约束文件。再编译生成比特流文件system.bit。
导出到SDK软件开发环境,在SDK环境里可以编写一些调试软件验证硬件和软件,结合比特流文件单独调试ZYNQ系统
在SDK里生成FSBL文件。
在VMware虚拟机里生成u-boot.elf bootloader镜像。
在SDK里通过FSBL文件, 比特流文件system.bit和u-boot.elf文件生成一个boot.bin文件。
在VMware里生成Linux的内核镜像文件zImage和Linux的文件系统ramdisk。另外还需要对FPGA自定义的IP编写驱动。
把boot.bin,zimage和ramdisk三个文件放入到SD卡的FAT分区中,启动开发板电源,Linux操作系统会从SD卡里启动。
一. 准备Linux系统的内核、uboot、文件系统、设备树等文件
1.1 编译uboot
在工作空间建立uboot目录,进入uboot目录,解压uboot源码
<workdir>$ cd uboot
uboot$ tar -jxvf u-boot-xlnx.tar.bz2
uboot$ cd u-boot-xlnx
编译uboot:
u-boot-xlnx$ make ARCH=arm CROSS_COMPILE=arm-xilinx-linux-gnueabi- distclean
u-boot-xlnx$ make ARCH=arm CROSS_COMPILE=arm-xilinx-linux-gnueabi- zynq_zturn_config
u-boot-xlnx$ make ARCH=arm CROSS_COMPILE=arm-xilinx-linux-gnueabi-
编译完成后,在当前目录下会生成"u-boot"ELF文件,将其重命名为"u-boot.elf"。
1.2 编译linux内核
在工作空间建立kernel目录,进入kernel目录,解压内核源码:
<workdir>$ cd kernel
kernel$ tar -xvjf linux-xlnx.tar.bz2
kernel$ cd linux-xlnx
开始编译:
linux-xlnx$ make ARCH=arm CROSS_COMPILE=arm-xilinx-linux-gnueabi- distclean
linux-xlnx$ make ARCH=arm CROSS_COMPILE=arm-xilinx-linux-gnueabi- zynq_zturn_defconfig
linux-xlnx$ make ARCH=arm CROSS_COMPILE=arm-xilinx-linux-gnueabi- uImage
linux-xlnx$ make ARCH=arm CROSS_COMPILE=arm-xilinx-linux-gnueabi- dtbs
编译完成后,在arch/arm/boot目录下生成uImage文件,在/arch/arm/boot.dts/生成zynq_zturn.dtb文件。
1.3 制作randisk
在工作空间建立filesystem目录,进入filesystem目录,将uramdisk.image.gz拷贝至该目录。
<workdir>$ cd filesystem
filesystem$ mkdir -p rootfs
去掉mkimage生成的64bytes文件头,生成新的ramdisk.image.gz
filesystem$ dd if=uramdisk.image.gz of=ramdisk.image.gz bs=64 skip=1
gunzip解压ramdisk.image.gz生成ramdisk.image
filesystem$ gunzip ramdisk.image.gz
将ramdisk.image挂在在rootfs目录
filesystem$ sudo mount -o loop,rw ramdisk.image rootfs
进入rootfs目录,根据需要做修改。
经笔者实验发现,米尔科技的开发板Zturn board在直接使用光盘文件时,以太网不能正常运行,经调试发现其ramdisk文件系统中关于网络的配置文件不完整,在ramdisk文件目录中,打开/etc/network/interfaces文件,发现其中没有关于eth0的配置,因此添加网络配置如下:
auto eth0
iface eth0 inet dhcp
重新生成ramdisk, 同步文件系统并卸载ramdisk
filesystem$ sync
filesystem$ umount rootfs
用gzip压缩ramdisk.image,生成ramdisk.image.gz
filesystem$ gzip -9 ramdisk.image
用mkimage添加头文件,生成新的uramdisk.image.gz供u-boot使用。
filesystem$ mkimage -A arm -T ramdisk -C gzip -n Ramdisk -d ramdisk.image.gz uramdisk.image.gz
至此,我们已经得到了u-boot.elf, uImage, devicetree.dtb, uramdisk.image.gz文件。
二. 在Vivado中建立硬件系统
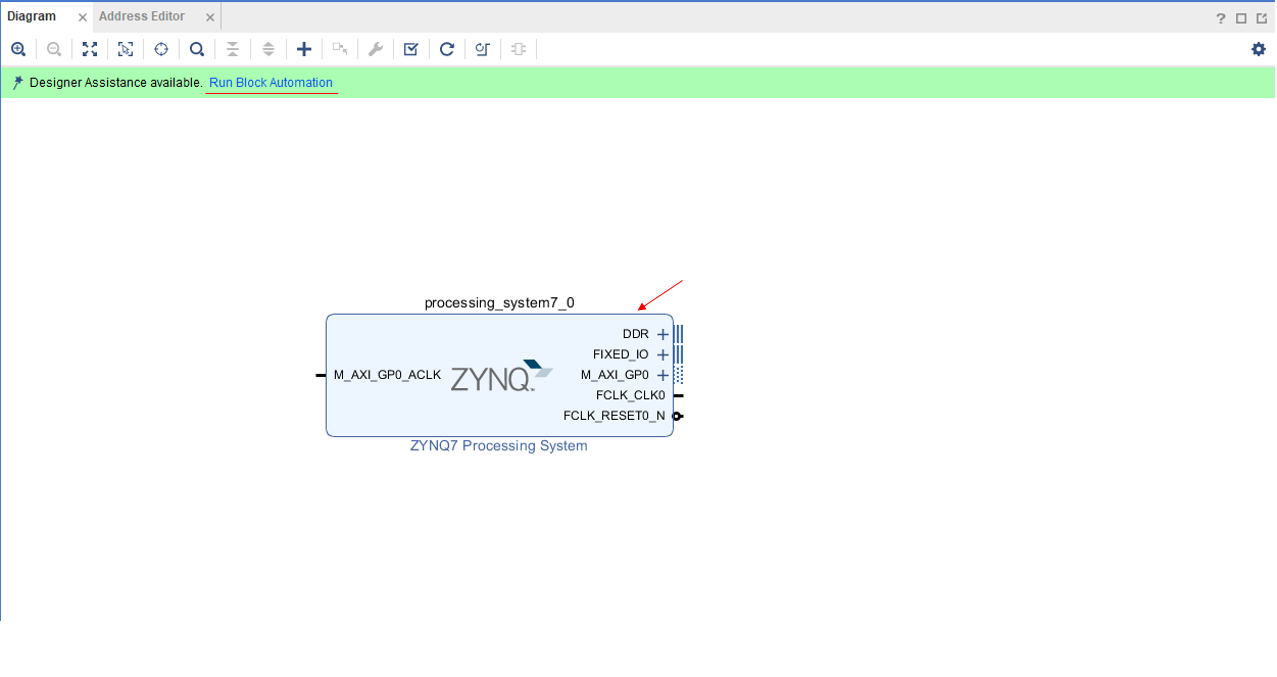
2.1 新建一个空白vivado工程,选择ZYNQ7010对应的芯片型号,点击左侧的Create Block Design,添加一个ZYNQ7的IP核。
点击Run Block Automation, 弹出的对话框直接点OK,双击ZYNQ IP核,配置参数。
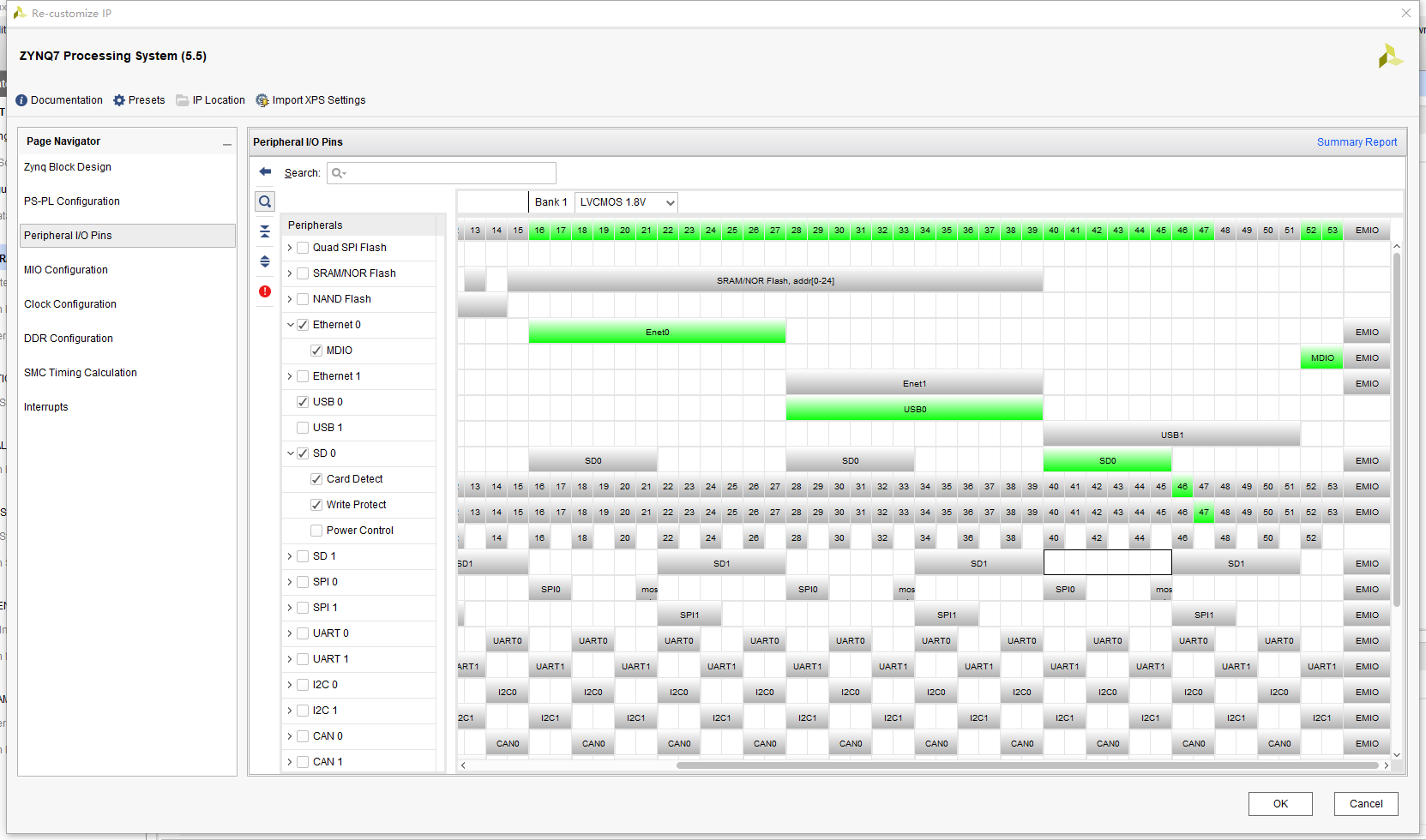
2.2 Peripheral I/O Pins配置
Bank 1选择LVCMOS 1.8V
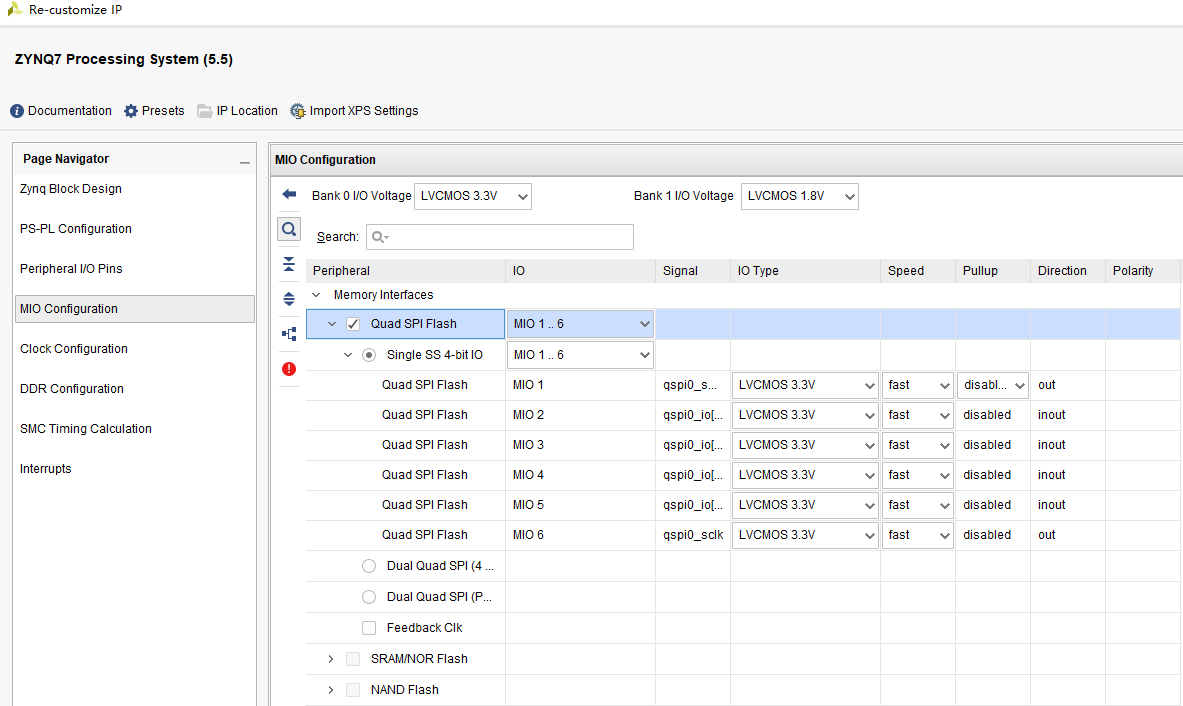
勾选Quad SPI Flash
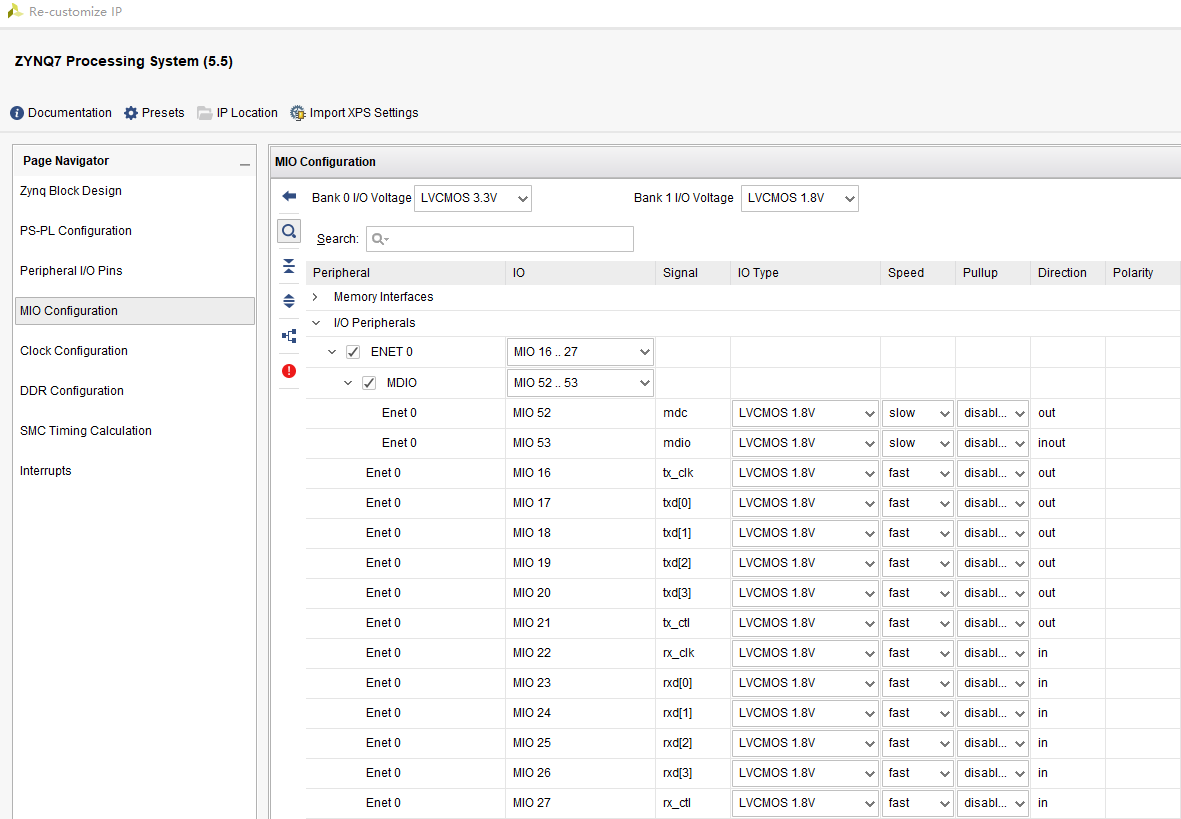
勾选Ethernet 0 以及展开目录下的MDIO,点击右侧Enet0, 配置其使用PS的MIO16~27, MDIO选择PS的MIO52,53,注意这两个选项不手动选择对应的引脚则使用EMIO。
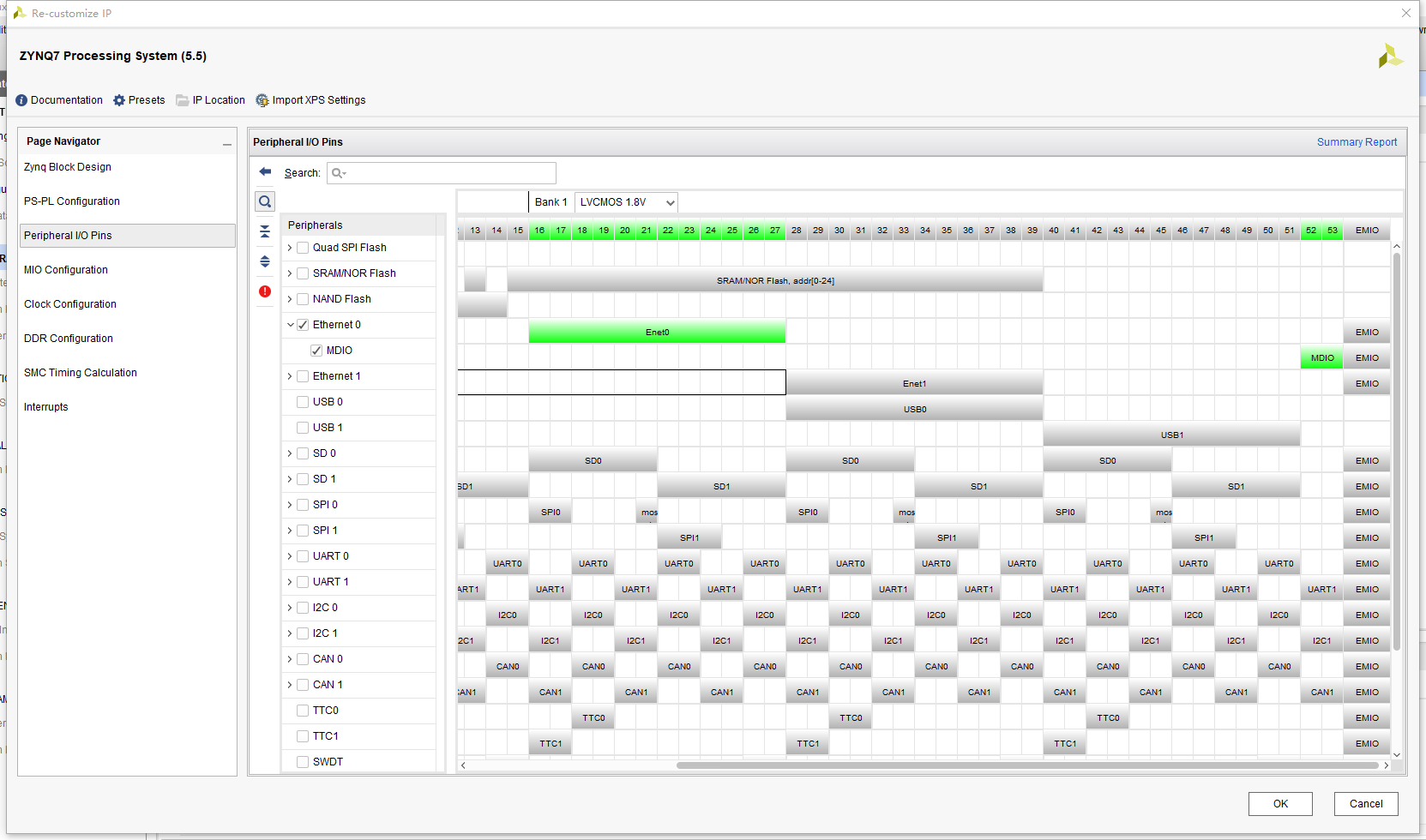
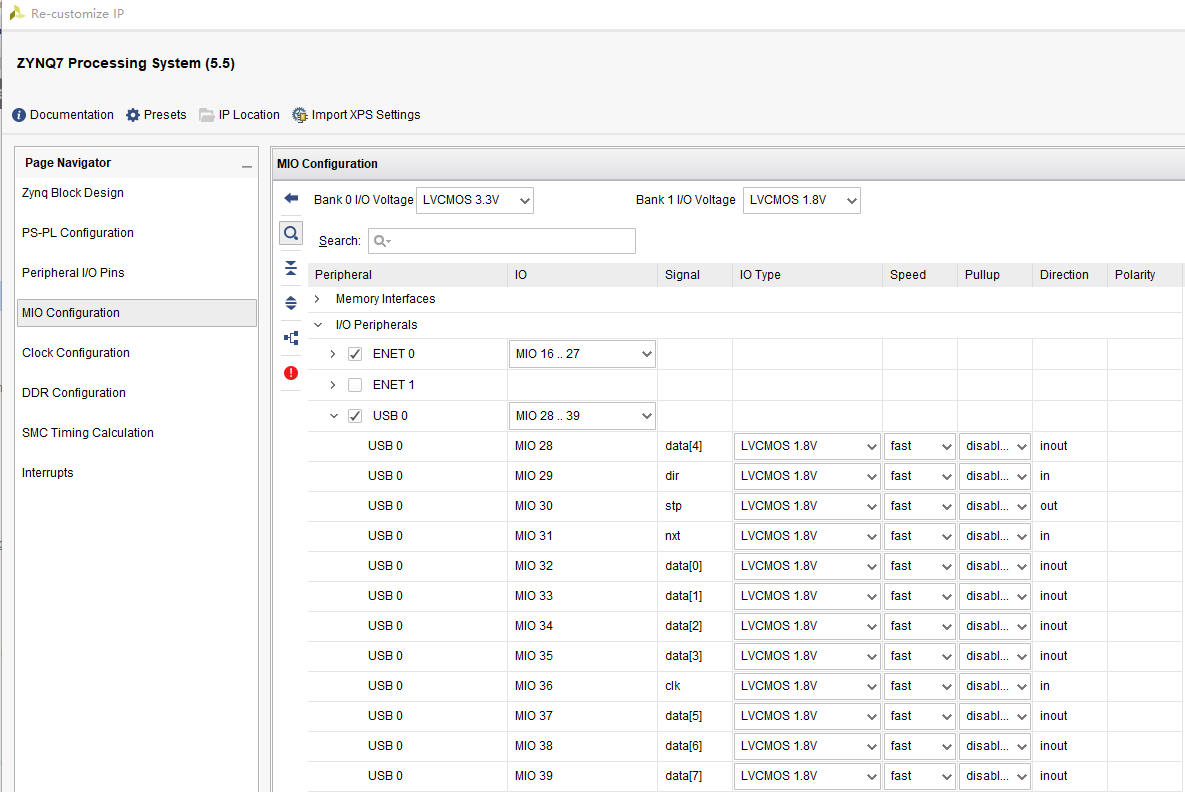
勾选USB0,使用PS的MIO28~39。
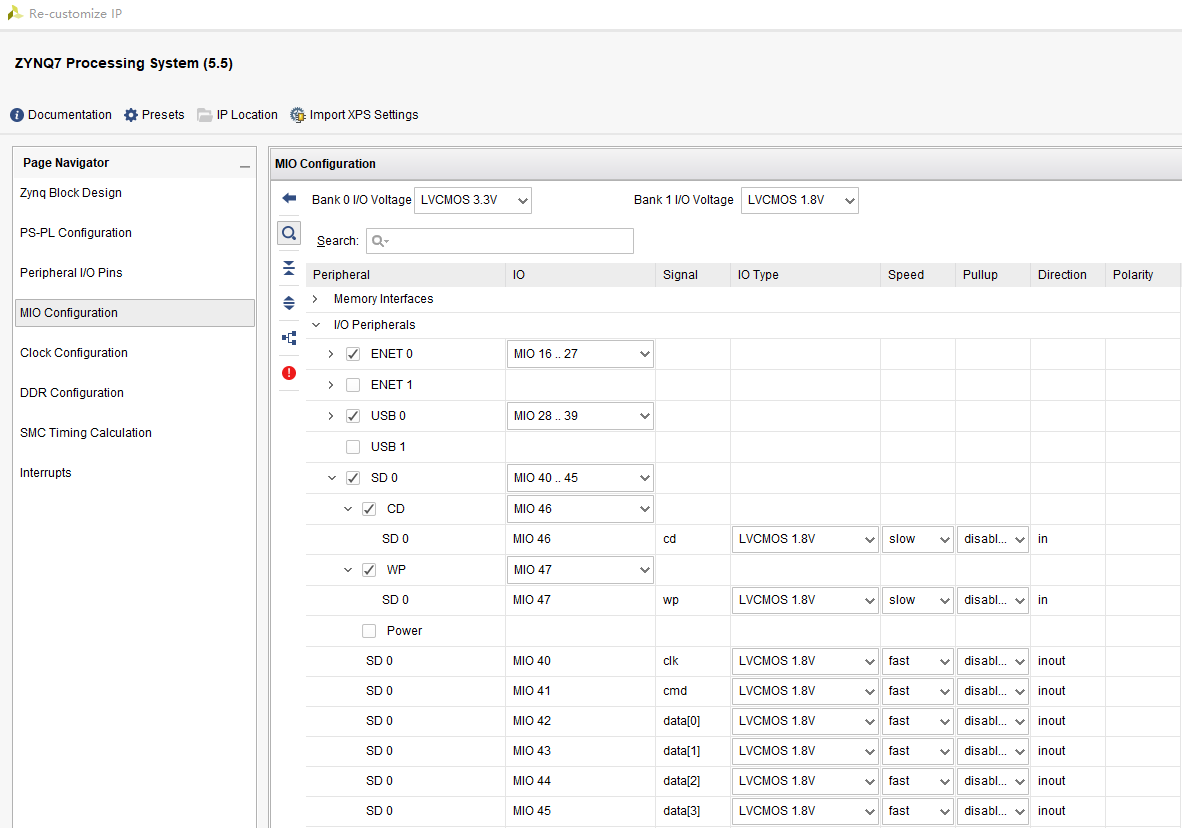
勾选SD0,使用PS的MIO40~45,展开SD0目录,使用选择Card Detect为MIO46, write Protect为MIO47.
勾选UART1, 使用PS的MIO48, 49.
勾选TTC0, 使用EMIO。
勾选GPIO MIO,不用选择展开的选项。
最后所有的配置如下图所示
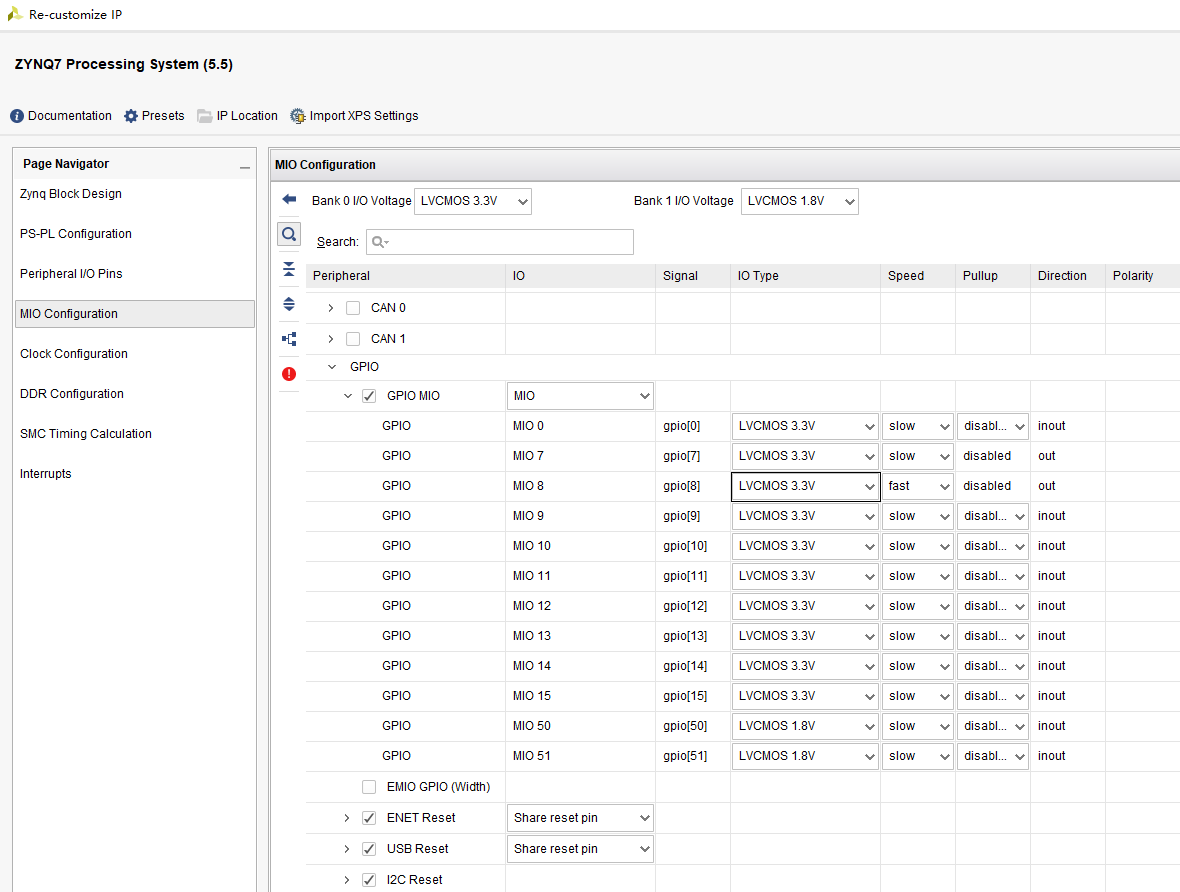
2.3 MIO Configurateion:
展开Memory Interfaces->Quad SPI Flash->Single SS 4-bit IO, 设置所有的引脚速度为"fast", MIO1选择disable;
展开I/O Peripherals所有项目,设置所有的引脚速度mdc和mdio为slow,其他为fast,所有引脚上拉设置为disable:
展开USB0选项,设置所有引脚速度为fast,上拉选disable:
展开SD0选项,设置如下:
展开GPIO,设置如下:
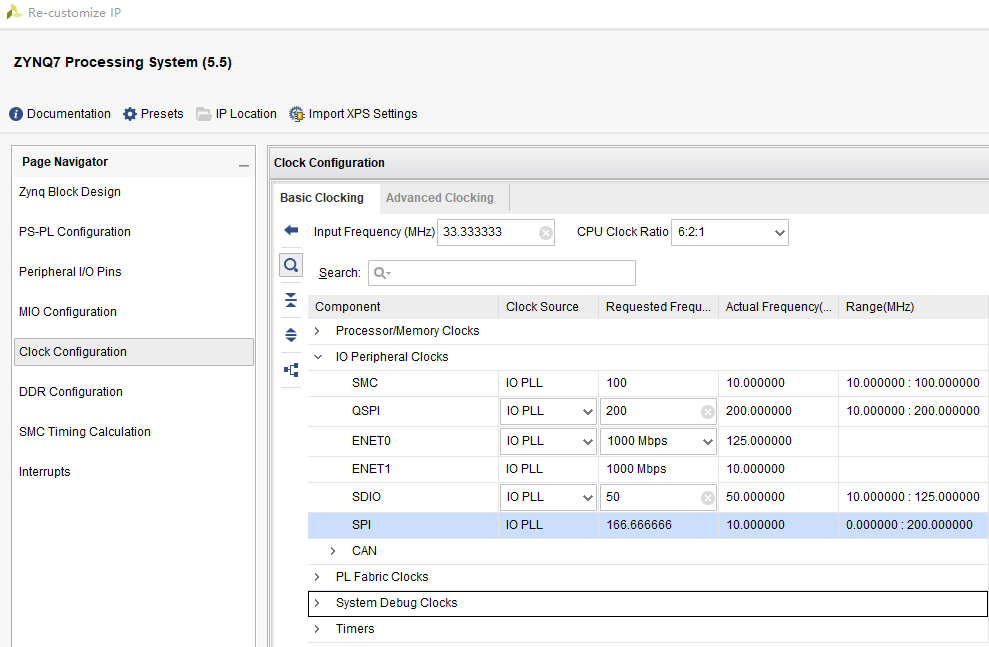
2.4 Clock Configuration,配置时钟频率如下图所示:
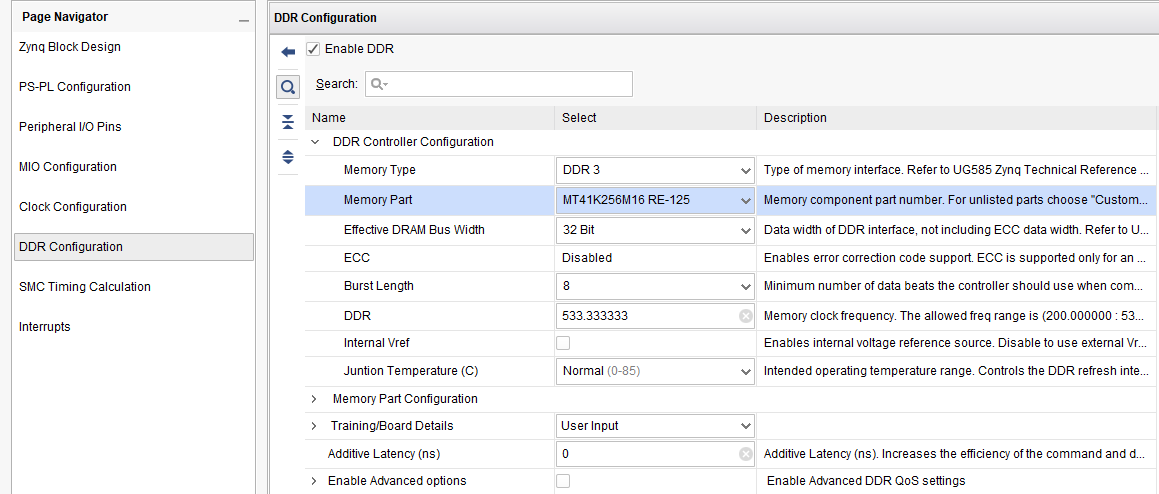
2.5 DDR Configuration
根据原理图,选择memory part为MT41K256M16 RE-125
2.6 编译硬件系统
右键选择原理图文件(Source选项中), 选择generate output products...,接着Run Synthesis, 综合完成后点击Run Implementation,编译完成后点击Generate Bitstream,导出硬件设计File->Export->eexport hardware, 然后启动SDK设计软件:File->Launch SDK.
在本次项目中并没有添加FPGA部分的设计代码,所有在整个流程没有关于FPGA的引脚约束,仿真等操作,这一部分将在后续介绍。
三. 在SDK中验证硬件设计并制作SD卡启动文件
3.1 在SDK中新建应用程序,以Hello world为模板。
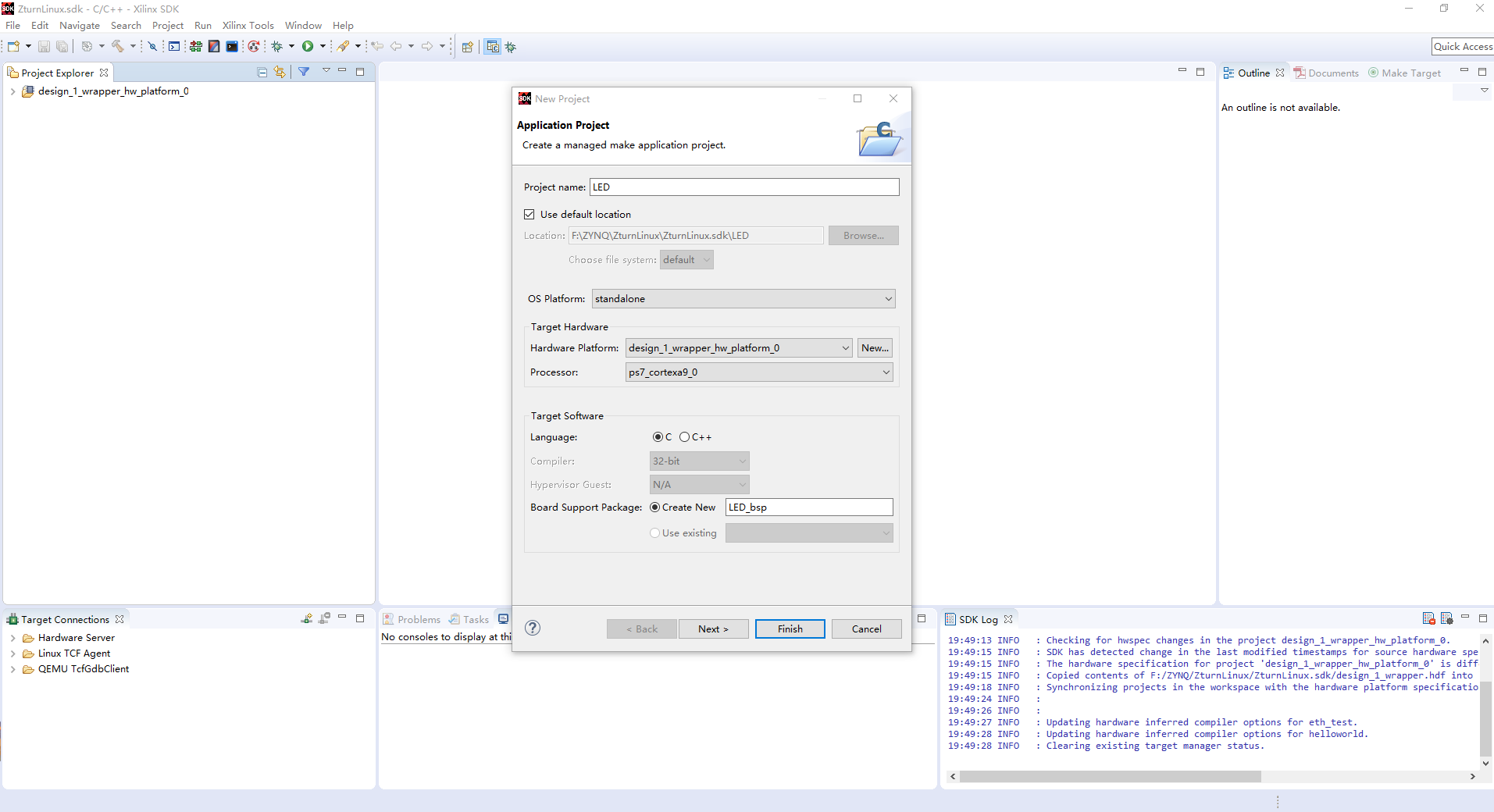
在Launch SDK之后,SDK软件一般会自动创建一个硬件平台(<project_hw_platform_0>),如果是在多次导出硬件设计过程中生成了多个platform_x文件,建议删除所有platform文件,重新导出。
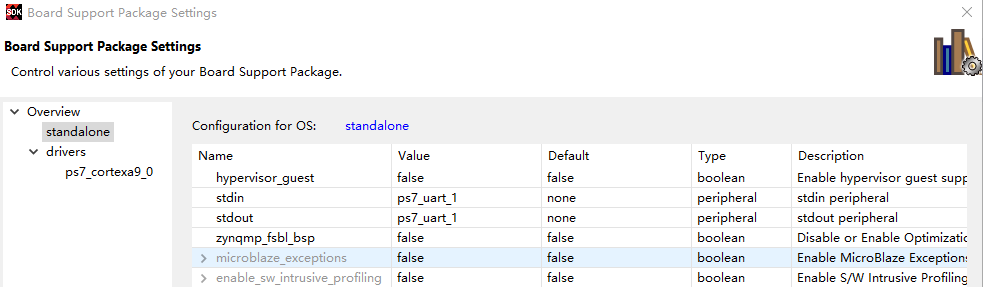
在生成的bsp工程上右键点击,Board Support Package Settings->Overview->standalone, 设置stdin和stdout为ps7_uart_1,因为在硬件设计中我们选择的是使用串口1作为终端串口输出,SDK在默认时时使用uart0, 因此如果在SDK中使用printf或xil_printf没有看到输出,则需要检查此处的设置。
3.2 连接仿真器,串口终端,电源,首先烧写FPGA程序(.bit文件), 然后运行helloworld工程,在终端上可以看到打印了一行hello world字符,说明基本硬件没有什么大问题。
3.3 创建FSBL
FSBL是first stage boot loader的简称,它是ZYNQ启动第一阶段加载的程序,固化在芯片内的BOOT ROM首先加载FSBL程序,FSBL加载u-boot, uboot加载Linux。因此要运行Linux系统必须要制作FSBL。
新建应用程序,选择以Zynq FSBL为模板工程。
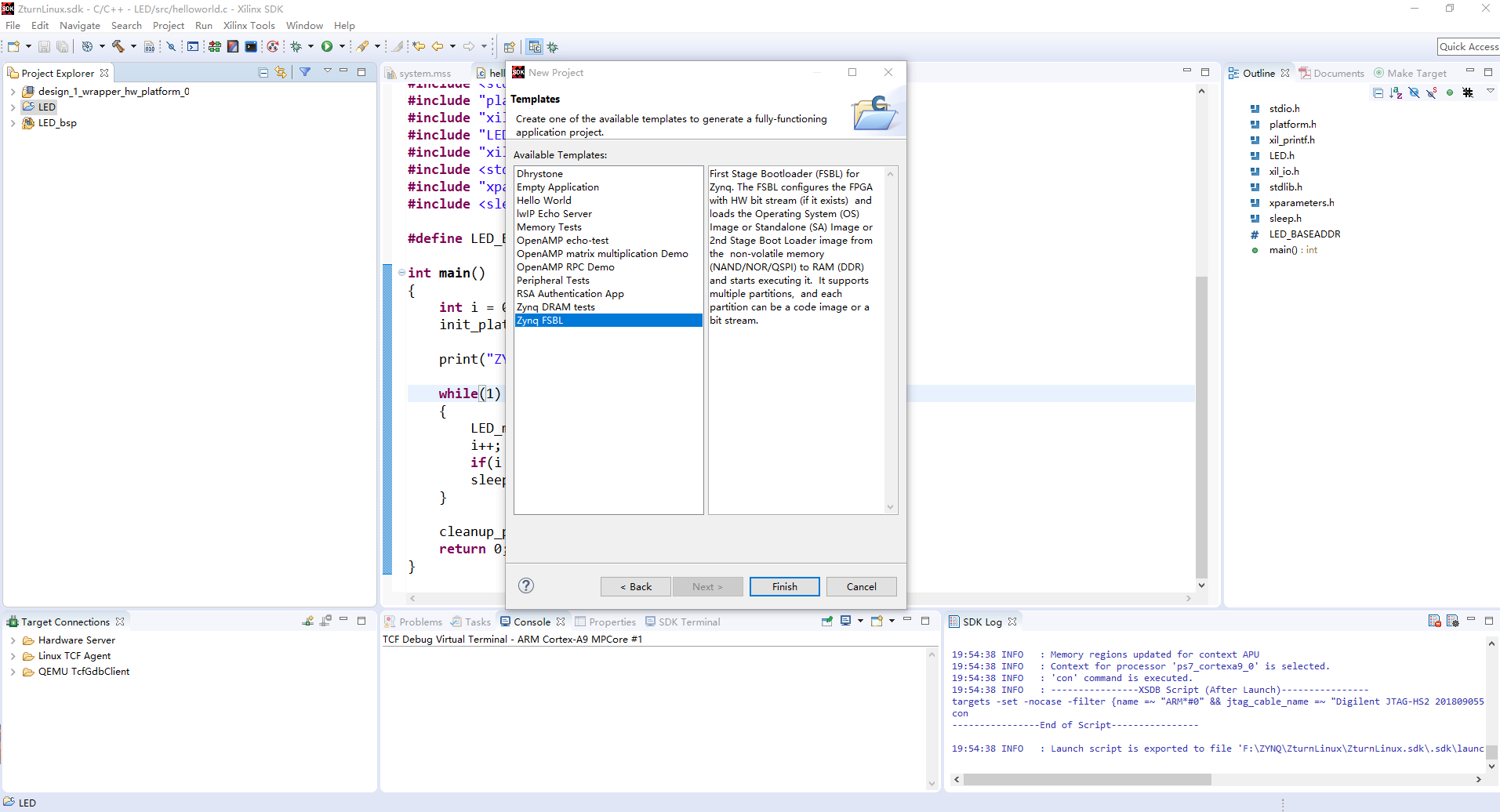
不用修改fsbl工程,直接编译生成的这个工程。
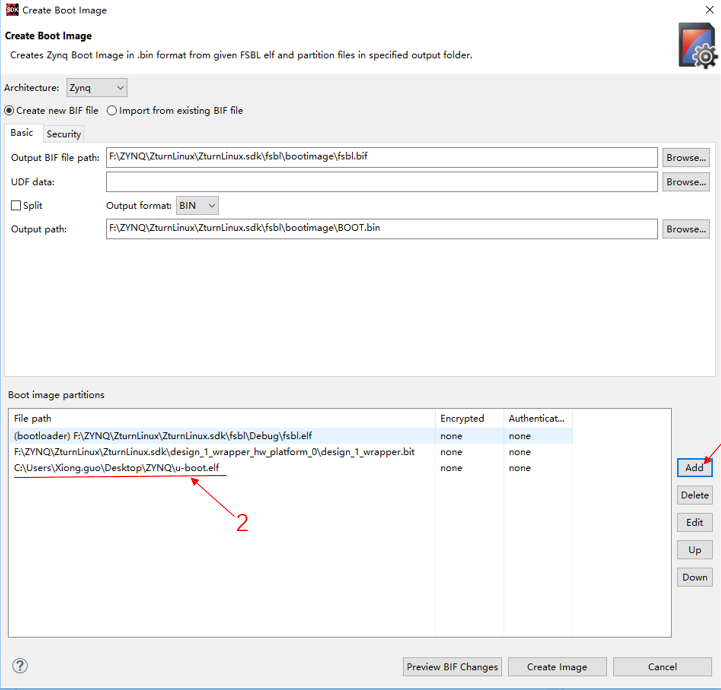
右键选择fsbl工程,选择Create Boot Image, 在Boot image partitions中已经添加了fsbl.elf, design_1_wrapper.bit,点击Add选择前面准备好的u-boot.elf文件,将三个文件一起生成BOOT.bin文件。
3.3 启动Linux系统
SD卡需要时FAT32格式,如果不是请格式化,将以上所有生成的文件放在SD卡的根目录下,如下图所示:
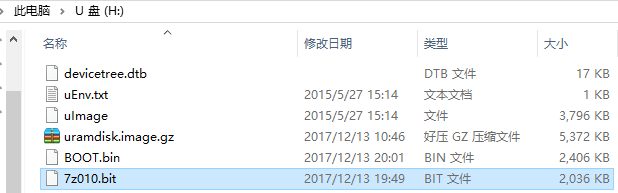
其中7z010.bit文件是有desig_1_wrapper.bit改名而来,如果不改需要在fsbl工程中去修改加载的.bit文件的名称,所以建议所有的工程生成后都重命名为7z010.bit,将SD卡插入开发板,上电启动。
事实上在本次设计中我们并没有设计关于FPGA部分的源文件,为什么还是要7z010.bit文件呢?在u-boot启动过程中如果没有检测到FPGA的配置文件u-boot将不启动Linux内核,所有无论有没有FPGA的设计都需要一个FPGA的配置文件,即使是空的配置。
ZYNQ学习之路1. Linux最小系统构建的更多相关文章
- [嵌入式开发入门]4412开发板从零建立Linux最小系统
本文转自iTOP-4412开发板实战教程书籍 http://www.topeetboard.com iTOP-4412开发板不仅可以运行Android,还可以运行简单的Linux最小文件系统. 最小L ...
- Linux最小系统移植之早期打印CONFIG_DEBUG_LL
一.几个关键宏定义 CONFIG_DEBUG_LL. CONFIG_DEBUG_LL_INCLUDE 容我慢慢道来, 首先要使能早期打印, menuconfig必须选中CONFIG_DEBUG_LL, ...
- Linux最小系统移植之早期打印CONFIG_EARLY_PRINTK
请先参考先前博文: Linux最小系统移植之早期打印CONFIG_DEBUG_LL , 因为eraly_printk其实就是对printch()封装的 一. 必要选项(在上面链接选中的前提下再新增 ...
- Linux 最小系统制作
Linux 最小系统制作 一.制作工具Busybox 在制作文件系统的时候,我们需要使用“Busybox 工具”,即为附件压缩包“busybox-1.21.1.tar.bz2”.“BusyBox 工具 ...
- C++学习之路——1.linux下环境搭建
学习之路,可说各有各的看法和方法.对于我来说,完全是兴趣一下子来了,脑壳发热吧.就想有个干净的环境,只想着与程序有关的东西练一练. 目前想学习C++,可是打开VC++6,再安了VS2010.VS201 ...
- 嵌入式Linux驱动学习之路(八)创建最小的根文件系统
busybox 在配置busybox,在是否选择要静态链接库时,在静态下,busybox中的工具不需要动态链接库,能够直接运行.而用户自己编写的程序如果需要动态链接库,还是依然需要有. 如果是动态链接 ...
- 在Linux最小系统上编译运行第一个helloworld程序
一.安装和使用SSH软件 1.安装SSH 软件 1)SSH 软件压缩包可以在网盘下载,下载后解压,进入解压出来的文件夹,如下图. 2)单击上图中的“SSHSecureShellClient-3.2.9 ...
- linux学习之路1 Linux系统安装
VMware workstation虚拟器 网上下载VMware workstation,然后安装任一系统的linux系统,不过选的系统一定要跟你下载好的linux镜像保持一致,博主装的是Red Ha ...
- Hadoop学习之路(8)Yarn资源调度系统详解
文章目录 1.Yarn介绍 2.Yarn架构 2.1 .ResourceManager 2.2 .ApplicationMaster 2.3 .NodeManager 2.4 .Container 2 ...
随机推荐
- 外部盒模型大小固定 内部有边框div设置浮动时 缩放窗口内部div溢出的解决办法
原因分析: chorme和firefox浏览器下当缩放窗口大小时,边框的计算宽度变大造成内部div宽度的计算宽度变大,外部div放不下内部div而溢出. 解决办法: 给内部div设置 box-sizi ...
- MyBatis——模糊查询
在mybatis中可以使用三种模糊查询的方式: <!-- 模糊查询 --> <select id="selectListByTitle" parameterTyp ...
- 堆(heap)、栈(stack)、方法区(method)
JVM内存分为3个区:堆(heap).栈(stack).方法区(method) 1.堆(heap):存储的全部对象,每个对象有个与之对应的class信息.即通过new关键字和构造器创建的对象.JVM只 ...
- Centos7下安装syslog-ng
1. syslog-ng的安装地址 https://github.com/balabit/syslog-ng/releases 下载最新版本. 2. 安装gnomeui开发包,因为syslog-ng依 ...
- Py-numpy的随机函数【转载】
转自:https://blog.csdn.net/u012149181/article/details/78913167 1. numpy.random.rand() numpy.random.ran ...
- NN中BP推导及w不能初始化为0
转自:为什么w不能初始化为0,而是要随机初始化?https://zhuanlan.zhihu.com/p/27190255 通俗理解BP.https://zhuanlan.zhihu.com/p/24 ...
- 软RAID管理命令mdadm详解
软RAID管理命令mdadm详解 mdadm是linux下用于创建和管理软件RAID的命令,是一个模式化命令.但由于现在服务器一般都带有RAID阵列卡,并且RAID阵列卡也很廉价,且由于软件RAID的 ...
- 命令行方式调用winrar对文件夹进行zip压缩示例代码
调用winRAR进行压缩 using System; using System.Collections.Generic; using System.Linq; using System.Text; u ...
- Tesseract 模块
https://www.cnblogs.com/new-june/p/9249903.html
- 笔记 : 将本地项目上传到GitHub
一.准备工作 1. 注册github账号https://github.com, 安装git工具 https://git-for-windows.github.io/ 2. 创建SSH KEY(由于本地 ...