【cartogarpher_ros】二: 官方Demo的介绍与演示
上一节我们介绍了在linux中快速安装集成ros环境的cartographer。
本节我们会来跑一些官方demo,用于测试cartographer是否正确安装,顺便看看cartographer的建图与定位效果。
这里建议如果和作者一样用的是VMware虚拟机,最好给系统分配4G以上的内存。
官方用例
https://google-cartographer-ros.readthedocs.io/en/latest/demos.html
目录
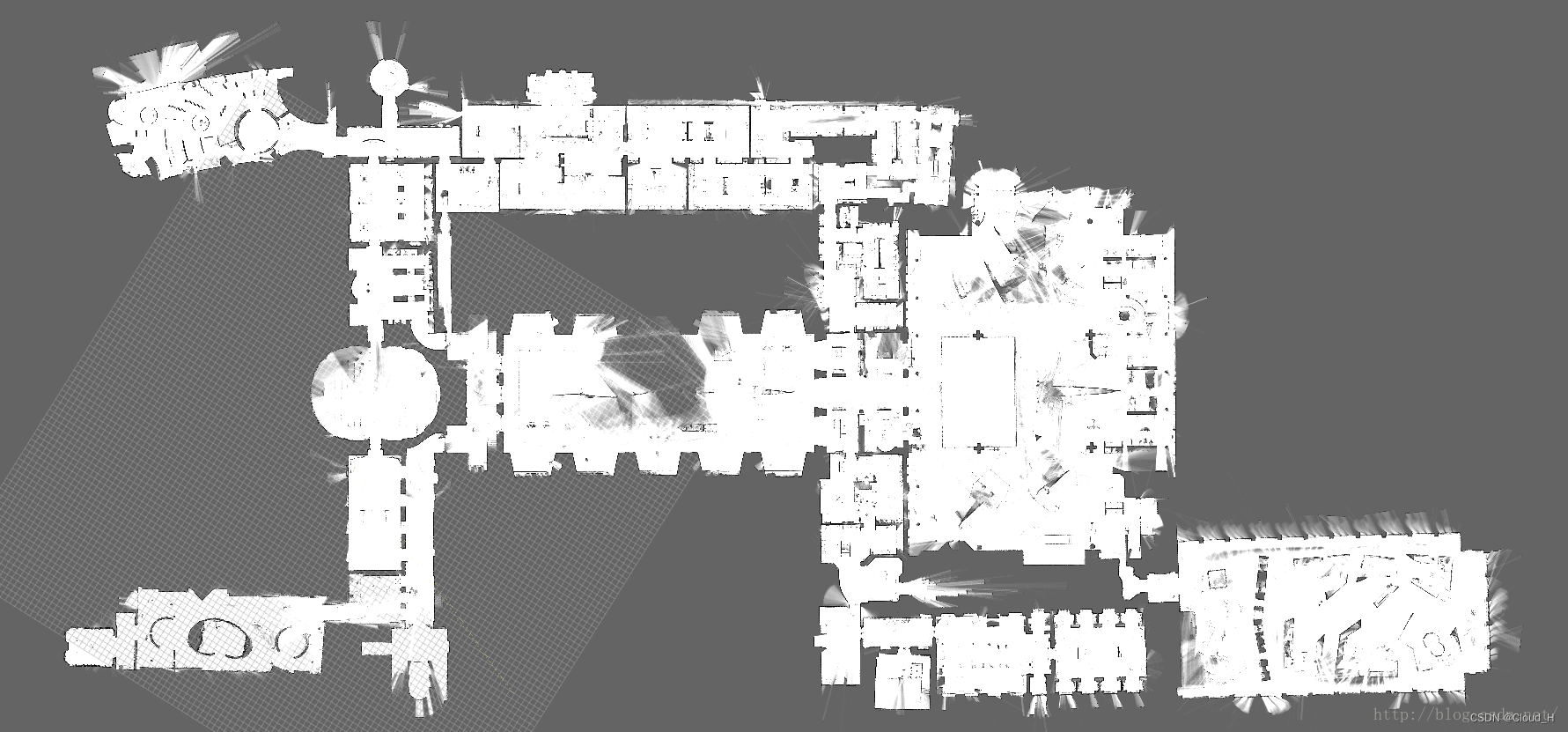
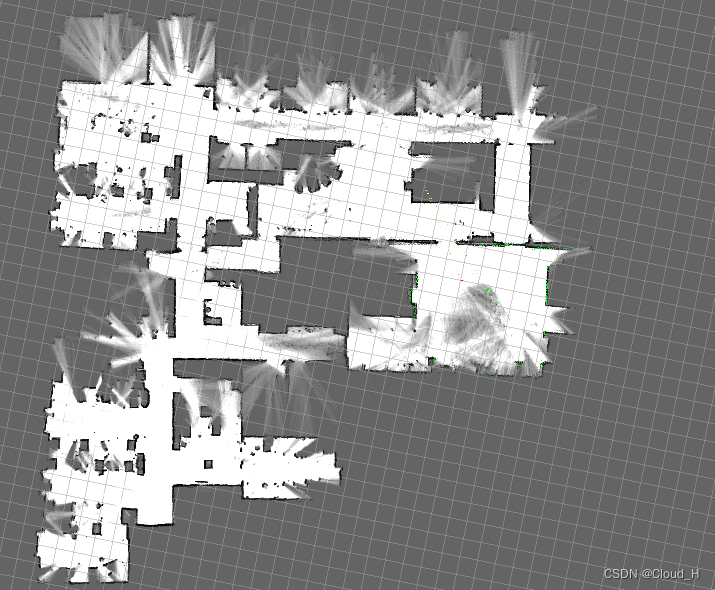
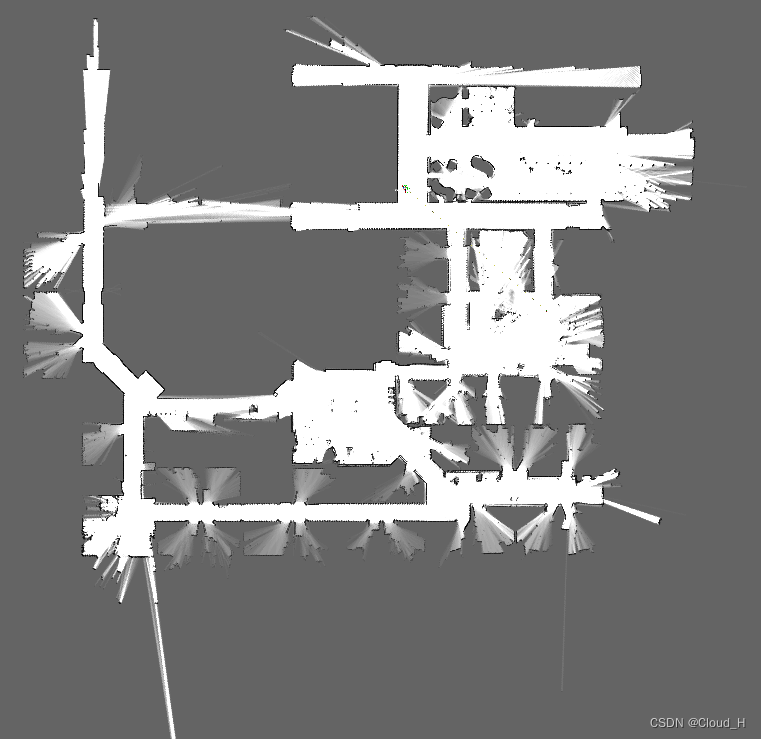
1:德国博物馆
通过雷达LaserScan和陀螺仪IMU建图的案例
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
过程:
结果:
2:纯定位
纯定位使用 2 个不同的包。第一个用于建图,第二个用于定位。
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/b2-2016-04-05-14-44-52.bag
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/b2-2016-04-27-12-31-41.bag
建图:
roslaunch cartographer_ros offline_backpack_2d.launch bag_filenames:=${HOME}/Downloads/b2-2016-04-05-14-44-52.bag

定位:
roslaunch cartographer_ros demo_backpack_2d_localization.launch \
load_state_filename:=${HOME}/Downloads/b2-2016-04-05-14-44-52.bag.pbstream \
bag_filename:=${HOME}/Downloads/b2-2016-04-27-12-31-41.bag
过程:
3:静态地标
此案例在建图过程中加入了landmark数据作为辅助。
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/mir/landmarks_demo_uncalibrated.bag
roslaunch cartographer_mir offline_mir_100_rviz.launch bag_filenames:=${HOME}/Downloads/landmarks_demo_uncalibrated.bag
过程
过程:
结果:
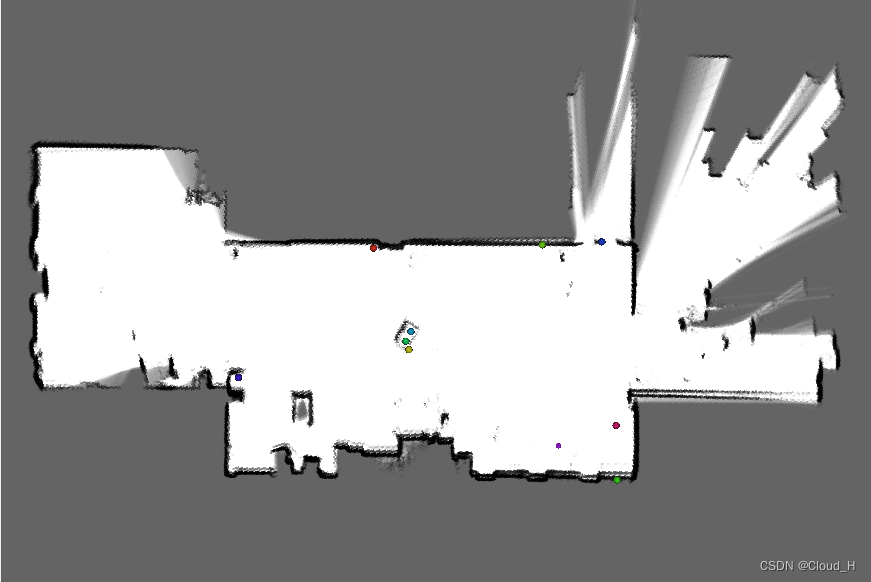
4:Revo LDS
从 Neato Robotics 真空吸尘器的低成本 Revo 激光距离传感器采集的Ros包,纯雷达建图。
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/revo_lds/cartographer_paper_revo_lds.bag
roslaunch cartographer_ros demo_revo_lds.launch bag_filename:=${HOME}/Downloads/cartographer_paper_revo_lds.bag
过程:
结果:
5:PR2
从 Willow Garage 的 PR2 研发机器人采集的Ros包。(这个包有3.7个G,不是必要的话可以不跑该示例)
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/pr2/2011-09-15-08-32-46.bag
roslaunch cartographer_ros demo_pr2.launch bag_filename:=${HOME}/Downloads/2011-09-15-08-32-46.bag
过程:
结果:
6:Taurob Tracker
从 Taurob Tracker 远程操作机器人采集的Ros包
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/taurob_tracker/taurob_tracker_simulation.bag
roslaunch cartographer_ros demo_taurob_tracker.launch bag_filename:=${HOME}/Downloads/taurob_tracker_simulation.bag
过程:
结果:
【完】
下一节我们将介绍在ros系统中,根据自己的需求发布和订阅传感器消息,给cartographer算法使用。
【cartogarpher_ros】二: 官方Demo的介绍与演示的更多相关文章
- android开源项目之OTTO事件总线(二)官方demo解说
官方demo见 https://github.com/square/otto 注意自己该编译版本为2.3以上,默认的1.6不支持match_parent属性,导致布局文件出错. 另外需要手动添加an ...
- Dubbo系列(3)_官方Demo说明
一.本文目的 通过Dubbo的官方Demo介绍,学会搭建一个简单的Dubbo程序,包括服务端.客户端.接口等. Demo地址:https://github.com/alibaba/dubbo/ ...
- 制作Android Demo GIF:程序演示效果GIF图录制
[转] 制作Android Demo GIF:程序演示效果GIF图录制 在平时写博客或者分享自己写的程序效果的时候经常需要做成GIF图,以下就是介绍几种常用的GIF录制方法: 一.录制工具 1.( ...
- weex官方demo weex-hackernews代码解读(上)
一.介绍 weex 是阿里出品的一个类似RN的框架,可以使用前端技术来开发移动应用,实现一份代码支持H5,IOS和Android.最新版本的weex已默认将vue.js作为前端框架,而weex-hac ...
- 「小程序JAVA实战」运行微信官方demo(四)
转自:https://idig8.com/2018/08/09/xiaochengxu-chuji-04/ 微信官方小程序的demo 介绍 https://mp.weixin.qq.com/cgi-b ...
- Qt5官方demo解析集13——Qt Quick Particles Examples - Image Particles
本系列全部文章能够在这里查看http://blog.csdn.net/cloud_castle/article/category/2123873 接上文 Qt5官方demo解析集12--Qt Quic ...
- Redis总结(五)缓存雪崩和缓存穿透等问题 Web API系列(三)统一异常处理 C#总结(一)AutoResetEvent的使用介绍(用AutoResetEvent实现同步) C#总结(二)事件Event 介绍总结 C#总结(三)DataGridView增加全选列 Web API系列(二)接口安全和参数校验 RabbitMQ学习系列(六): RabbitMQ 高可用集群
Redis总结(五)缓存雪崩和缓存穿透等问题 前面讲过一些redis 缓存的使用和数据持久化.感兴趣的朋友可以看看之前的文章,http://www.cnblogs.com/zhangweizhon ...
- Qt5官方demo解析集28——Extending QML - Signal Support Example
本系列全部文章能够在这里查看http://blog.csdn.net/cloud_castle/article/category/2123873 接上文Qt5官方demo解析集27--Extendin ...
- Qt5官方demo分析集10——Qt Quick Particles Examples - Emitters
此系列的所有文章都可以在这里查看http://blog.csdn.net/cloud_castle/article/category/2123873 前段时间去听了Qt在北京的开发人员大会,感觉QML ...
随机推荐
- HCNP Routing&Switching之端口隔离
前文我们了解了组播路由协议稀疏模式中的RP相关话题,回顾请参考https://www.cnblogs.com/qiuhom-1874/p/16154347.html:今天我们来聊一聊二层交换机中有关v ...
- C++ atomic 和 memory ordering 笔记
如果不使用任何同步机制(例如 mutex 或 atomic),在多线程中读写同一个变量,那么,程序的结果是难以预料的.简单来说,编译器以及 CPU 的一些行为,会影响到程序的执行结果: 即使是简单的语 ...
- css3 做出顶边倾斜的 梯形 div
效果图: <html> <head> <meta charset="utf-8"> <title>顶边倾斜的div梯形</ti ...
- 数据库-mysql索引篇
点赞再看,养成习惯,微信搜索「小大白日志」关注这个搬砖人. 文章不定期同步公众号,还有各种一线大厂面试原题.我的学习系列笔记. mysql的索引类型? mysql中有5种索引:普通索引.唯一索引.主键 ...
- vue 收集表单数据 (有错误的请各位大佬指点)
收集表单数据: 若: <input type="text"/>, 则v-model收集 的是value值,用户输入的就是value值. 若 ...
- 五二不休息,今天也学习,从JS执行栈角度图解递归以及二叉树的前、中、后遍历的底层差异
壹 ❀ 引 想必凡是接触过二叉树算法的同学,在刚上手那会,一定都经历过题目无从下手,甚至连题解都看不懂的痛苦.由于leetcode不方便调试,题目做错了也不知道错在哪里,最后无奈的cv答案后心里还不断 ...
- logging、openpyxl、第三方模块下载
### 日志模块的组成部分 ```pythonimport logging# 1.logger对象:产生日志logger = logging.getLogger('转账记录')# 2.filter对象 ...
- Docker容器(container)详解 (转载自http://c.biancheng.net/view/3150.html)
- SUSE系统---keepalived的搭建
作为博客第一篇,先小尝初试一下搭建keepalived,因为项目需要搭建集群,为了满足需要,需要服务器对外暴露个虚拟IP,进行集群部署. 第一步:先把keepalived.tra.gz压缩包放到相应目 ...
- html5 tts(文字朗读)
在 chrome 下使用比较好的中文语音包. 注意 speechSynthesis.getVoices() 有时候可能会返回空数组,需要做验证 var zhCnLangs = speechSynthe ...