【cartogarpher_ros】二: 官方Demo的介绍与演示
上一节我们介绍了在linux中快速安装集成ros环境的cartographer。
本节我们会来跑一些官方demo,用于测试cartographer是否正确安装,顺便看看cartographer的建图与定位效果。
这里建议如果和作者一样用的是VMware虚拟机,最好给系统分配4G以上的内存。
官方用例
https://google-cartographer-ros.readthedocs.io/en/latest/demos.html
目录
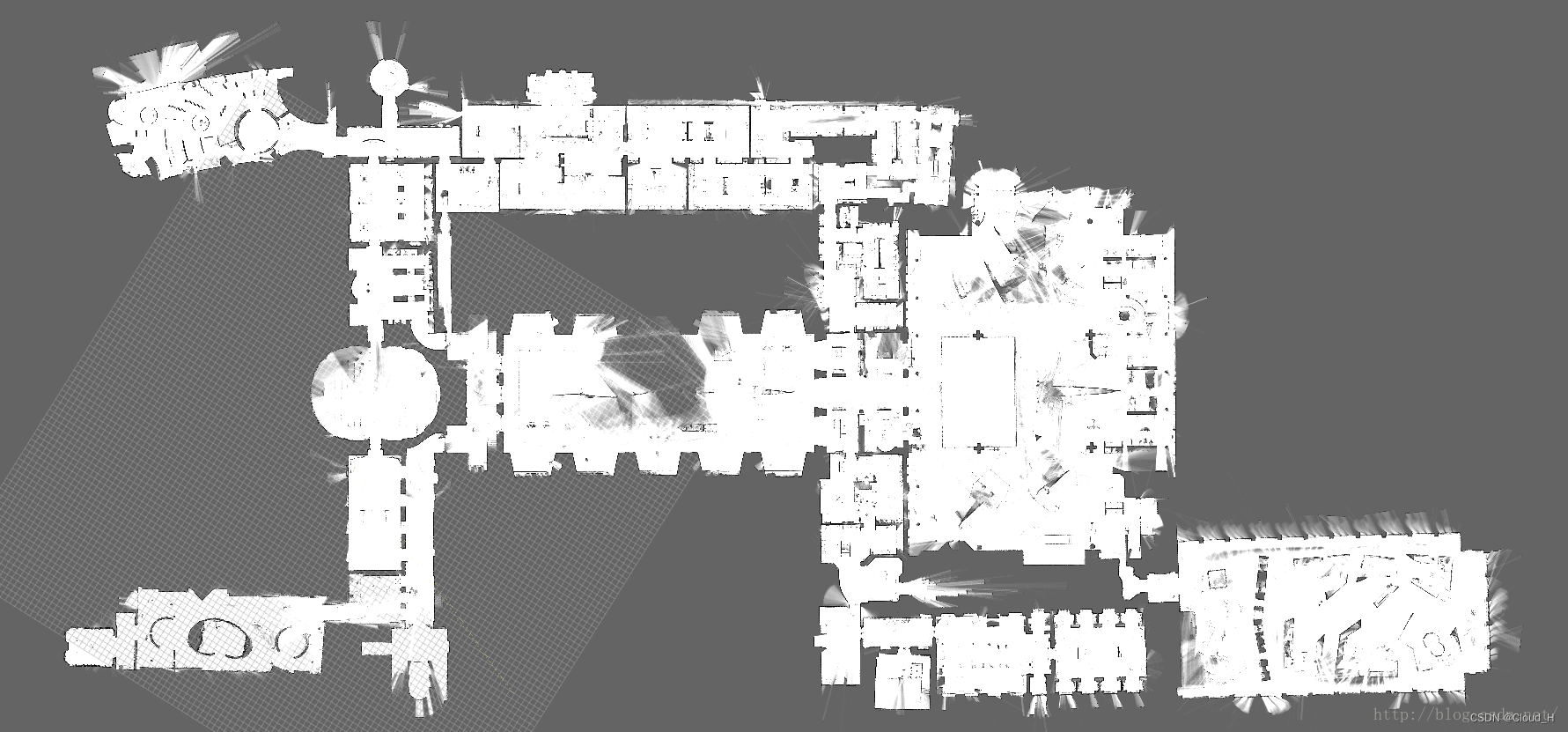
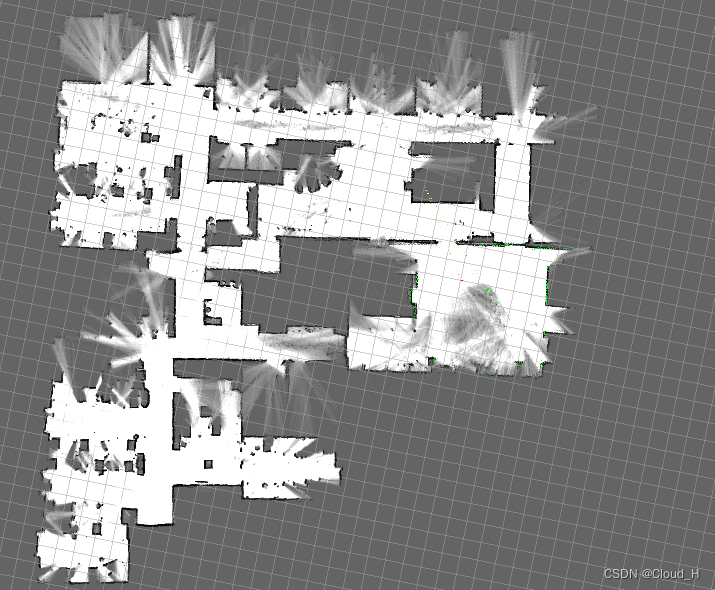
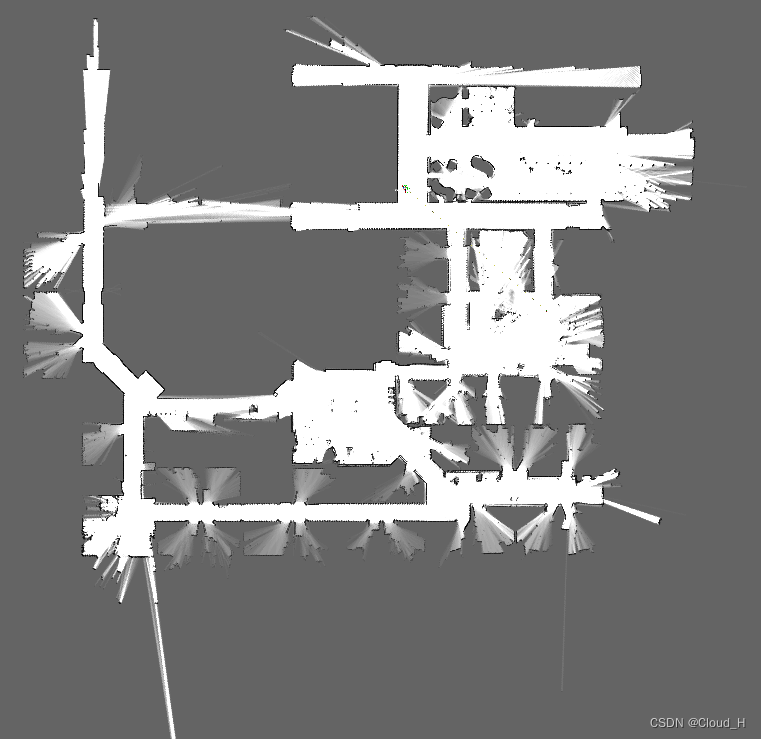
1:德国博物馆
通过雷达LaserScan和陀螺仪IMU建图的案例
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
过程:
结果:
2:纯定位
纯定位使用 2 个不同的包。第一个用于建图,第二个用于定位。
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/b2-2016-04-05-14-44-52.bag
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/b2-2016-04-27-12-31-41.bag
建图:
roslaunch cartographer_ros offline_backpack_2d.launch bag_filenames:=${HOME}/Downloads/b2-2016-04-05-14-44-52.bag

定位:
roslaunch cartographer_ros demo_backpack_2d_localization.launch \
load_state_filename:=${HOME}/Downloads/b2-2016-04-05-14-44-52.bag.pbstream \
bag_filename:=${HOME}/Downloads/b2-2016-04-27-12-31-41.bag
过程:
3:静态地标
此案例在建图过程中加入了landmark数据作为辅助。
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/mir/landmarks_demo_uncalibrated.bag
roslaunch cartographer_mir offline_mir_100_rviz.launch bag_filenames:=${HOME}/Downloads/landmarks_demo_uncalibrated.bag
过程
过程:
结果:
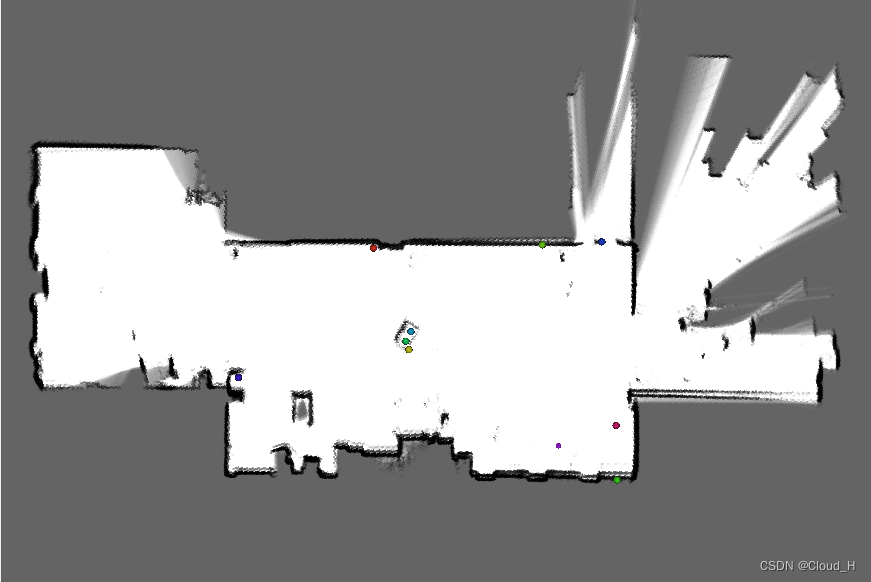
4:Revo LDS
从 Neato Robotics 真空吸尘器的低成本 Revo 激光距离传感器采集的Ros包,纯雷达建图。
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/revo_lds/cartographer_paper_revo_lds.bag
roslaunch cartographer_ros demo_revo_lds.launch bag_filename:=${HOME}/Downloads/cartographer_paper_revo_lds.bag
过程:
结果:
5:PR2
从 Willow Garage 的 PR2 研发机器人采集的Ros包。(这个包有3.7个G,不是必要的话可以不跑该示例)
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/pr2/2011-09-15-08-32-46.bag
roslaunch cartographer_ros demo_pr2.launch bag_filename:=${HOME}/Downloads/2011-09-15-08-32-46.bag
过程:
结果:
6:Taurob Tracker
从 Taurob Tracker 远程操作机器人采集的Ros包
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/taurob_tracker/taurob_tracker_simulation.bag
roslaunch cartographer_ros demo_taurob_tracker.launch bag_filename:=${HOME}/Downloads/taurob_tracker_simulation.bag
过程:
结果:
【完】
下一节我们将介绍在ros系统中,根据自己的需求发布和订阅传感器消息,给cartographer算法使用。
【cartogarpher_ros】二: 官方Demo的介绍与演示的更多相关文章
- android开源项目之OTTO事件总线(二)官方demo解说
官方demo见 https://github.com/square/otto 注意自己该编译版本为2.3以上,默认的1.6不支持match_parent属性,导致布局文件出错. 另外需要手动添加an ...
- Dubbo系列(3)_官方Demo说明
一.本文目的 通过Dubbo的官方Demo介绍,学会搭建一个简单的Dubbo程序,包括服务端.客户端.接口等. Demo地址:https://github.com/alibaba/dubbo/ ...
- 制作Android Demo GIF:程序演示效果GIF图录制
[转] 制作Android Demo GIF:程序演示效果GIF图录制 在平时写博客或者分享自己写的程序效果的时候经常需要做成GIF图,以下就是介绍几种常用的GIF录制方法: 一.录制工具 1.( ...
- weex官方demo weex-hackernews代码解读(上)
一.介绍 weex 是阿里出品的一个类似RN的框架,可以使用前端技术来开发移动应用,实现一份代码支持H5,IOS和Android.最新版本的weex已默认将vue.js作为前端框架,而weex-hac ...
- 「小程序JAVA实战」运行微信官方demo(四)
转自:https://idig8.com/2018/08/09/xiaochengxu-chuji-04/ 微信官方小程序的demo 介绍 https://mp.weixin.qq.com/cgi-b ...
- Qt5官方demo解析集13——Qt Quick Particles Examples - Image Particles
本系列全部文章能够在这里查看http://blog.csdn.net/cloud_castle/article/category/2123873 接上文 Qt5官方demo解析集12--Qt Quic ...
- Redis总结(五)缓存雪崩和缓存穿透等问题 Web API系列(三)统一异常处理 C#总结(一)AutoResetEvent的使用介绍(用AutoResetEvent实现同步) C#总结(二)事件Event 介绍总结 C#总结(三)DataGridView增加全选列 Web API系列(二)接口安全和参数校验 RabbitMQ学习系列(六): RabbitMQ 高可用集群
Redis总结(五)缓存雪崩和缓存穿透等问题 前面讲过一些redis 缓存的使用和数据持久化.感兴趣的朋友可以看看之前的文章,http://www.cnblogs.com/zhangweizhon ...
- Qt5官方demo解析集28——Extending QML - Signal Support Example
本系列全部文章能够在这里查看http://blog.csdn.net/cloud_castle/article/category/2123873 接上文Qt5官方demo解析集27--Extendin ...
- Qt5官方demo分析集10——Qt Quick Particles Examples - Emitters
此系列的所有文章都可以在这里查看http://blog.csdn.net/cloud_castle/article/category/2123873 前段时间去听了Qt在北京的开发人员大会,感觉QML ...
随机推荐
- 如何实现 antd table 自动调整可视高度(纵向滚动条,scrollY)
一.事情的起因 最近在做的项目中有大量的表格,正常的表格高度是没有限制的,数据量很大的时候会出现表格内容以及分页信息超出可视窗口, 为了查看超出的部分就需要滚动页面但是这样就会把查询条件等信息滚出可视 ...
- WFP资源
资源基础 WPF程序在代码中以及在标记中的各个位置定义资源,具有高效性.可维护性.适应性的优点. 资源的层次 <Windows.Resource> <ImageBrush x:key ...
- Oracle查看表空间大小
遇到报错 java.sql.SQLException: ORA-01653: 表 MESHIS.HIS_RET_LOT_FQC 无法通过 8 (在表空间 MESHIS_DATA_TBS 中) 扩展 a ...
- 1.11 Linux的主要应用领域有哪些?
与Windows操作系统软件一样,Linux 也是一个操作系统软件.但与Windows不同的是,Linux是一套开放源代码程序的,并可以自由传播的类UNIX操作系统软件,随着信息技术的更新变化,Lin ...
- 1.10 Linux桌面环境(桌面系统)大比拼[附带优缺点
早期的 Linux 系统都是不带界面的,只能通过命令来管理,比如运行程序.编辑文档.删除文件等.所以,要想熟练使用 Linux,就必须记忆很多命令. 后来随着 Windows 的普及,计算机界面变得越 ...
- 关于transform属性的一些理解
3D transform transform进行动画演示时,是以元素的中心为基准点的,可以使用transform-origin改变元素转变的基准点. 所有的transform动作改变都会引起X.Y轴的 ...
- drools的类型声明(Type declarations)
一.背景 在我们编写drl规则的时候,有些时候需要自己声明一些类,用于辅助之后的规则运行,如果需要用到的类还需要在java中预先声明出来,这样就不灵活了,那么是否可以在drl文件中声明一个类呢?可以使 ...
- mysql allow remote host
GRANT ALL PRIVILEGES ON *.* TO 'root'@'%' IDENTIFIED BY 'password' WITH GRANT OPTION; FLUSH PRIVILEG ...
- 【Java面试】如何理解Spring Boot中的Starter?
一个工作了3年的Java程序员,遇到一个Spring Boot的问题. 他对这个问题有一些了解,但是回答得不是很好,希望参考我的高手回答. 这个问题是:"如何理解Spring Boot中的S ...
- Docker 与 K8S学习笔记(二十三)—— Kubernetes集群搭建
小伙伴们,好久不见,这几个月实在太忙,所以一直没有更新,今天刚好有空,咱们继续k8s的学习,由于我们后面需要深入学习Pod的调度,所以我们原先使用MiniKube搭建的实验环境就不能满足我们的需求了, ...