vim学习小结
参考书籍《Linux 从入门到精通》第二版(刘忆智 等编著)
Vim编辑器
背景:Vim的设计哲学就是让使用者能够在主键盘区完成所有工作。
vim是vi的增强版本,vim分为插入和命令两种模式
插入模式下可以输入字符
命令模式下可执行除了输入字符之外的所有操作,包括保存、搜索、移动光标等。
1.编辑和保存
启动vim时自动处于命令模式
编辑一个文件:
可以在命令行下输入vim file(如果file不存在,那么vim会自动新建一个名为file的文件),启动vim时自动处于命令模式,按i键可以进入插入模式(防坑:按键之前请确保当前输入法是英文), 此命令用于在当前光标所在处插入字符。vim会在左下角提示用户此时所处的模式。
示例:
vim test.py进入文件内,此时为命令模式

输入i后,进入插入模式:

输入想要输入的内容后,按Esc键回到命令模式,此时左下角的“-- 插入 --”提示消失,告诉用户正处于命令模式下。
保存文件:
下一步,需要保存这个文件。需要使用 “:” 命令在底部打开一个命令行,此时光标闪烁,等待用户输入命令

:q 简单退出,如果有修改的话,vim会拒绝退出并在底部显示提示信息
:q! 强制退出
:w 保存不退出
:wq 保存并退出
:wq newfilename 保存退出并另存为新文件名,如果newfilename已存在,可加 ! 强制覆盖。
2.搜索
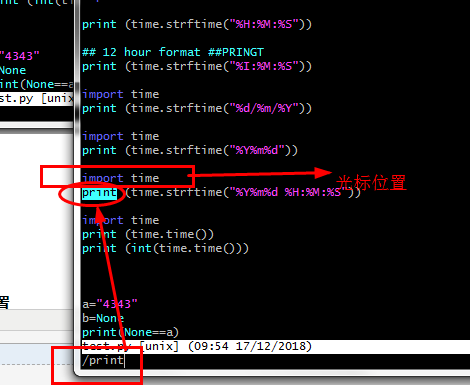
/string 向前查找(从光标开始的地方“朝向文件尾”)
?string 向后查找(从光标开始的地方“朝向文件头”)
这里的“前”指的是“朝向文件尾”,“后”指的是朝向文件头,跟常见理解的意义不太一样,可以稍稍留意下,通常常用的也就是/string。那么查找到字符串之后,想跳转到下一个出现string的位置如何是好呢。
在首次回车查找之后,按下“n”跳转到下一个出现string的地方,按下“N”跳转到上一个出现string的地方。示例:
3.替换
整体格式 :{作用范围}s/{目标}/{替换成}/{替换标志}
先看一个示例,稍后一一来解释
示例::%s/prints/print/g
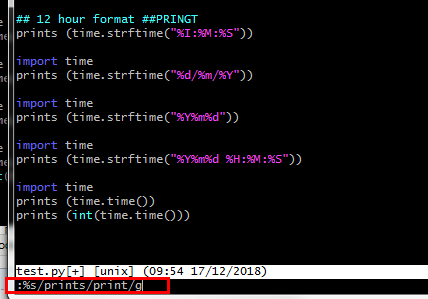
回车之后显示如图,所有prints已经被替换成了print

3.1 首先,作用范围
1,4表示从第1行到第4行
n,$s表示从第n行到最后一行
1,$s表示从第一行到最后一行,也可用%s来表示
s的话就表示当前行
3.2 /{目标}/{替换成}
简单来说就是想要把{目标}替换成{替换成},数入想要的内容即可
3.3 {替换标志}
c 每次替换前询问
e 不显示错误信息
g 替换一行中所有的匹配项(此选项通常需要使用)
i 不区分大小写
4.常用配置
vim的配置文件叫vimrc
linux下通常位置etc/vim目录下,修改此配置文件需要root权限,如果没有特殊需要的话,不要那么做。用户可以在自己的主目录下新建一个名为“.vimrc”的文件,然后把配置信息写在里面。
windows电脑下如果安装也会在目录中有一个vimrc文件。如果有一些个性化的配置,可以在此文件更改
比如说自动缩进:set autoindent
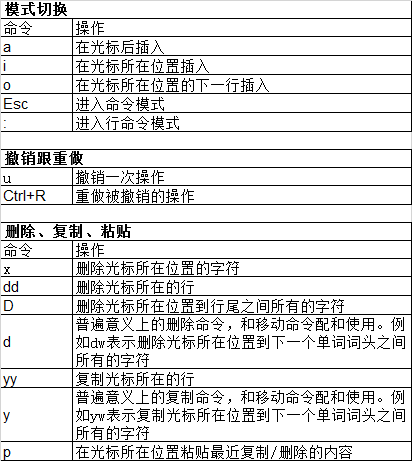
5.常用命令表
vim学习小结的更多相关文章
- Vim 学习指南
作者:耀耀 出处:http://www.linuxeden.com/html/news/20130820/142667.html Vim 学习指南 来源:开源中国社区 作者:耀耀 关注我们: 你想 ...
- flex学习小结
接触到flex一个多月了,今天做一个学习小结.如果有知识错误或者意见不同的地方.欢迎交流指教. 画外音:先说一下,我是怎么接触到flex布局的.对于正在学习的童鞋们,我建议大家没事可以逛逛网站,看看人 ...
- Python 学习小结
python 学习小结 python 简明教程 1.python 文件 #!/etc/bin/python #coding=utf-8 2.main()函数 if __name__ == '__mai ...
- react学习小结(生命周期- 实例化时期 - 存在期- 销毁时期)
react学习小结 本文是我学习react的阶段性小结,如果看官你是react资深玩家,那么还请就此打住移步他处,如果你想给一些建议和指导,那么还请轻拍~ 目前团队内对react的使用非常普遍,之 ...
- objective-c基础教程——学习小结
objective-c基础教程——学习小结 提纲: 简介 与C语言相比要注意的地方 objective-c高级特性 开发工具介绍(cocoa 工具包的功能,框架,源文件组织:XCode使用介绍) ...
- pthread多线程编程的学习小结
pthread多线程编程的学习小结 pthread 同步3种方法: 1 mutex 2 条件变量 3 读写锁:支持多个线程同时读,或者一个线程写 程序员必上的开发者服务平台 —— DevSt ...
- ExtJs学习笔记之学习小结LoginDemo
ExtJs学习小结LoginDemo 1.示例:(登录界面) <!DOCTYPE html> <html> <head> <meta charset=&quo ...
- Linux学习系列之Linux入门(二)Vim学习
第二篇 Vim学习 主要内容: 基本命令: 插件扩展: 参考资料: vim是一个命令控制的文本编辑器,可以完成几乎我们想要做的所有工作,除了Emacs几乎没有其他的工具能和它匹敌.官方网站是:http ...
- Vi/VIM键盘图, Vi/vim学习图
Vi/vim学习图 引用: Vi键盘图片可视化教程 http://www.cnblogs.com/me115/archive/2010/11/16/1878295.html 网上的文章易流失.感谢分享 ...
- 点滴的积累---J2SE学习小结
点滴的积累---J2SE学习小结 什么是J2SE J2SE就是Java2的标准版,主要用于桌面应用软件的编程:包括那些构成Java语言核心的类.比方:数据库连接.接口定义.输入/输出.网络编程. 学习 ...
随机推荐
- 洛谷 P1478 陶陶摘苹果(升级版) 题解
这道题只要会自定义cmp恰当地进行排序,其他部分没有什么大问题. 上代码: 1 #include<bits/stdc++.h> 2 using namespace std; 3 int n ...
- 图文并茂使用VUE+Quasar CLI开发和构建PWA,registerServiceWorker介绍
看文档 文档地址:Preparation for PWA 1.将PWA模式添加到我们的Quasar项目中: npx quasar mode add pwa 我们看一下有哪些变化 向Quasar项目添加 ...
- JavaScript 检查(Linting)工具的比较
一个好的检查(linting)工具可以确保一个项目遵循编码规范. 让我们来看看四种流行替代方案的特性和优缺点:JSLint , JSHint , JSCS 和 ESLint . JSLint JSLi ...
- 分布式事务 | 使用 dotnetcore/CAP 的本地消息表模式
本地消息表模式 本地消息表模式,其作为柔性事务的一种,核心是将一个分布式事务拆分为多个本地事务,事务之间通过事件消息衔接,事件消息和上个事务共用一个本地事务存储到本地消息表,再通过定时任务轮询本地消息 ...
- chatGPT vscode 体验
体验秘钥 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 多人用可能有点卡,重在体验. 自己(中国)想注册账号如下 步骤一:找到入口 搜索Ope ...
- springboot集成ElasticApm
jvm参数方式: -javaagent:D:/codesoft/elastic-apm-agent-1.18.0.jar -Delastic.apm.service_name=my-applicati ...
- 实现简单的`Blazor`低代码
本篇博客只实现基本的低代码,比如新增组件,动态修改组件参数 创建项目 首先创建一个空的Blazor Server,并且命名LowCode.Web 实现我们还需要引用一个Blazor组件库,由于作者用M ...
- Vue过滤案例、按键修饰符、数据双向绑定
目录 Vue过滤案例.按键修饰符.数据双向绑定 一.v-for能循环的类型 二.js的几种循环方式 三.key值的解释 四.数组.对象的检测与更新 五.input的几个事件 六.事件修饰符 七.按键修 ...
- 无法从“System.ReadOnlyMemory<byte>”转换为“byte[]”
1.问题复现 RabbitMQ的官方示例:RabbitMQ消费端(接收端)获取消息时抛出异常,具体代码如下 var consumer = new EventingBasicConsumer(chann ...
- 视觉SLAM:VIO的误差和误差雅可比矩阵
1.两个相机之间的非线性优化 观测相机方程关于相机位姿与特征点的雅可比矩阵: 1.1 位姿: 1.2 3D特征点 fx,fy,fz为相机内参 X',Y',Z'为3D点在相机坐标系下的坐标 该误差是观测 ...