S120的基本定位功能
一、概述
S120 有两种形式:
用于多轴系统的 DC/AC 装置
用于单轴系统的 AC/AC 装置
这两种形式的 Firmware V2.4 及以上版本都已具备基本定位功能。当前V2.4 版本的 S120具有如下定位功能:
• 点动 (Jog): 用于手动方式移动轴,通过按钮使轴运行至目标点
• 回零 (Homing/Reference):用于定义轴的参考点或运行中回零
• 限位 (Limits):用于限制轴的速度、位置。包括软限位、硬限位
• 程序步 (Traversing Blocks): 共64个程序步,可自动连续执行一个完整的程序也可单步执行
• 直接设定值输入/手动设定值输入 (Direct Setpoint Input / MDI):目标位置及运行速度可由上位机实时控制。
使用 S120 基本定位功能的前提条件:
调试软件:Starter V4.0 或更高版本 / SCOUT V4.0 或更高版本
硬件版本:SINAMICS FW: V2.4 HF2 或更高版本
注:
安装 SCOUT V4.0 需要STEP 7 版本至少为 V5.3.3.1 以上
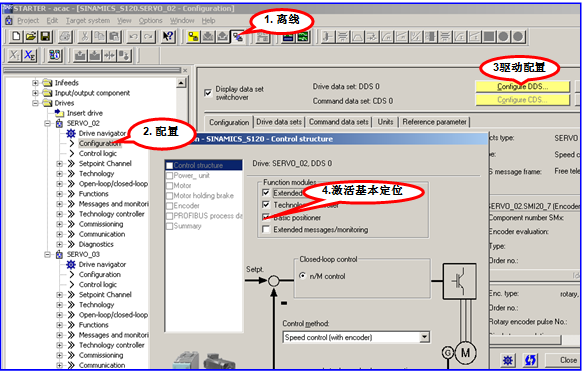
二、激活基本定位功能
S120的定位功能必须在变频器离线配置中激活,步骤如下:
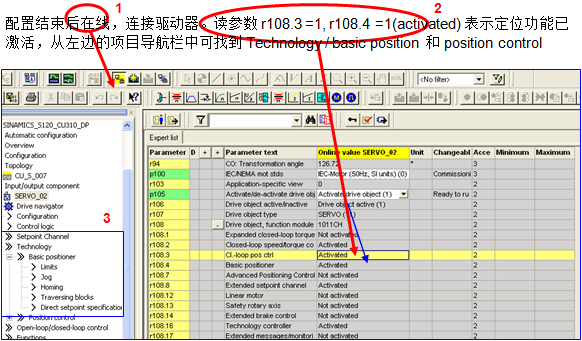
定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置
使用控制面板 使用专家参数表
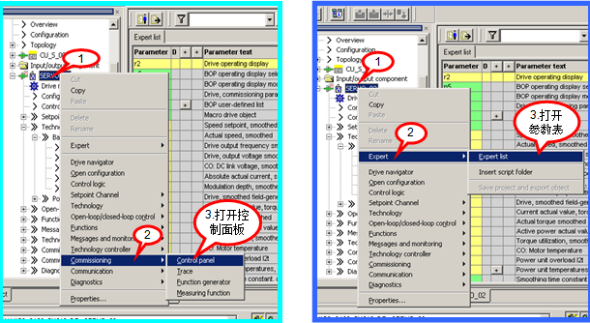
使用控制面板的操作步骤:
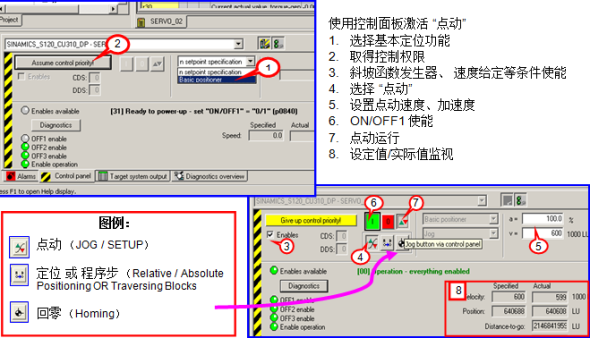
三、基本定位_点动(JOG)
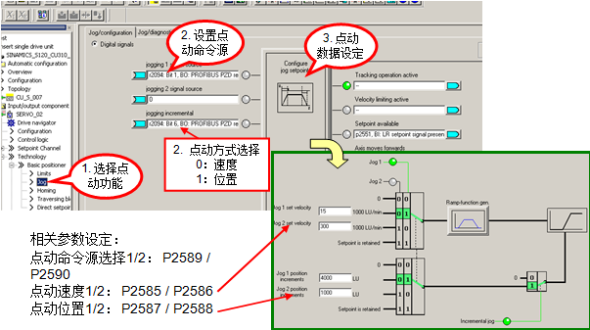
S120 中基本定位功能的点动有两种方式:
• 速度方式( travel endless):点动按钮按下,轴以设定的速度运行直至按钮释放。
• 位置方式( travel incremental):点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止。
• 使用控制面板的点动功能仅限于速度方式,位置方式需使用专家参数表设定。
• 执行点动功能,应先使能变频器ON/OFF1(P0840)
四、基本定位_回零(Homing / Reference)
回零/寻参(Homing / Reference)
回参考点模式(回零模式)只有使用增量编码器(旋转编码器 Reserver、正/余弦编码器Sin/Cos 或 脉冲编码器)时需要,因每次上电时增量编码器与轴的机械位置之间没有任何确定的关系。因此轴都必须被移至预先定义好的零点位置。即执行 Homing 功能。
当使用绝对编码器 ( Absolute ) 时每次上电不需重新回零。
S120 中回零有三种方式:
• 直接设定参考点 (Reference): 对任意编码器均可
• 主动回零 (Reference point approach): 主要指增量编码器
• 动态回零 (Flying Reference):对任意编码器均可
4.1设置参考点 (Set_Reference)
通过用户程序可设置任意位置为坐标原点。通常情况下只有当系统即无接近开关又无编码器的零脉冲时,或者当需要轴被设置为一个不同的位置时才使用该方式
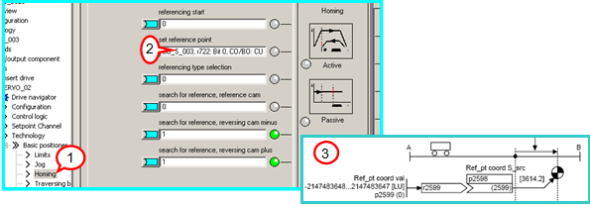
操作步骤(已设定开关量输入点 DI2 为ON/OFF1命令源 P840)
1. 进入“Homing”
2. 连接一数字量输入点 ( DI 1 )至参数 P2596作为设置参考点信号位,该位上升沿有效
3. 设定参考点位置坐标值 P2599(如 0)
4. 闭合DI 2运行使能
5. 闭合DI 1 激活“设置参考点”命令,于是该轴当前位置 r 2521 立即被置为P2599 中设定的值。如 r2521=0
4.2主动回零(Active Homing)
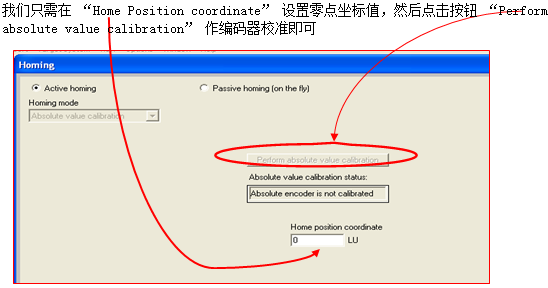
主动回零方式只适用于增量编码器,绝对值编码器只需在初始化阶段进行一次编码器校准,以后不必做回零
主动回零有三种方式:
仅用编码器零标志位( Encoder Zero Mark ) 回零
仅用外部零标志( External Zero Mark ) 回零
使用接近开关 + 编码器零标志位( Homing output cam + Zero Mark ) 回零
4.2.1绝对值编码器的主动回零
如果我们使用绝对值编码器并且作主动回零时会看到如下页面:
4.2.2增量编码器的主动回零
依下图所示进行配置
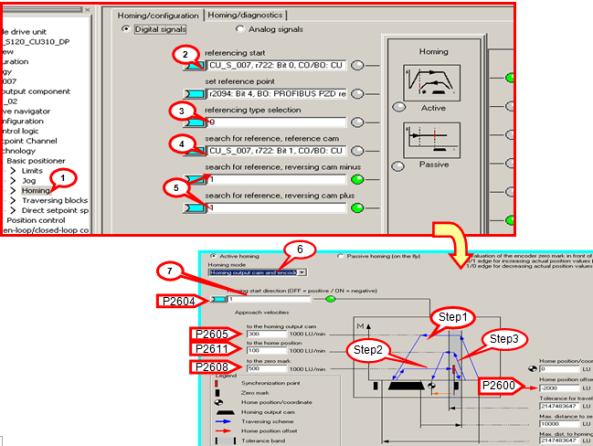
相关参数设定
1. 进入 “ Homing “ (回零) 页面
2. 定义开关量输入点DI 1为开始寻参命令(参数P2595=722.0)
3. 回零方式选择主动回零P2597=0
4. 定义开关量输入点DI 2为接近开关 P2612= 722.1(粗脉冲)
5. 指定轴运行极限点,如果回零过程中极限点到达(P2613/P2614=0)则轴反转。若两点全为零则轴停止。
6. 指定回零方式:接近开关 + 编码器零脉冲
7. 指定回零开始方向P2604 (0:正向;1:反向)
动作过程:
变频器运行ON/OFF1闭合,DI 1闭合,开始寻参过程
• 上图中(Step1)轴按照P2604 定义的搜索方向,以最大加速度 P2572 加速至搜索速度 P2605,到达接近开关后(DI 2 闭合),以最大减速度P2573减速停止,进入下一步:搜索编码器的零脉冲
• 轴反向加速至速度 P2608,离开接近开关后(DI 2 断开)遇到的编码器的第一个零脉冲后轴停止。进入下一步:回参考点
• 上图中(Step3)轴反向加速以速度 P2611运行偏置距离P2600后停止在参考点,完成主动回零过程。
4.3动态回零(Passive Homing)
Passive Homing (动态回零)又称为 Homing on the fly
动态回零用于轴工作于任意定位状态时动态修改当前位置值为零(如:在点动时、执行程序步时,执行 MDI 时),执行动态回零后并不影响轴当前的运行状态,轴并不是真正的回到零点而只是其当前位置值被置为0,重新开始计算位置。
前提条件:P2597=1
绝对值编码器的动态回零:

参数设定
• 打开 “ Homing “ (回零) 页面
• 定义开始寻参命令P2595源(如开关量输入点DI2)
• 回零方式选择动态回零P2597=1
• 指定接近开关Bero为上升沿有效(如上图中P2511)
• 定义开关量输入点DI 10(只能为快速I / O)为接近开关 P488= 722.10(如上图中2)
动作过程:
• 变频器运行(使能ON/OFF1),选择任意一种命令(如点动,程序步、MDI等)轴按照所选择的方式运行
• 闭合DI 2,开始动态回零
• 闭合快速开关DI 10(下图中红色线为该开关状态),可见到位置实际值立即恢复为0,后重新计值(如图中绿色线所示),在整个动态回零过程中轴的运行速度不受影响。

五、基本定位_限位(Limit)
S120 中包含两种限位功能:软限位、硬限位。以限制轴运行范围。同时还有对轴运行速度,加减速的限制。
如下图所示激活限位方式
• 项目导航栏中选择限位功能块
• 激活软限位P2582 =1,正/反向位置范围通过 P2578, P2579设定
• 激活硬限位P2568 =1,硬限位位置开关源 P2569, P2570
• 最大速度:P2571、最大加速度:P2572、最大减速度:P2573

注:限位开关信号为 “ 低 “ 有效
到达硬限位后轴将以最大减速度 P2573 故障停车,即使故障复位后也只允许反向运行
六、基本定位_程序步(Traversing Blocks)
通过使用Traversing Blocks _ “程序步” 模式可以自动执行一个完整的定位程序,也可实现单步控制;各程序步之间可通过数字量输入信号切换。但只有当前程序步执行完后下一程序步才有效。
在S120 中提供了最多 64个程序步供使用。

程序步执行步骤:
1. 项目导航栏中选择 Traversing Blocks 模式,设定开关量输入点DI4用于激活程序步功能
2. 不拒绝任务 P2641= r722.2=1、没有停止命令 P2640=1
运行过程中P2640=0发出停止命令,则轴将以减速度P2620减速停车。
若断开DI 3 ( r722.2=0 )发出拒绝任务命令,则轴将以最大减速度P2573减速停车。
3. 按工艺需要设定各个程序步参数,程序步代号决定程序的执行顺序。代号为 -1表示该步不执行(初始代号全部为 -1)。
4. 通过6个数字量输入点的不同组合选择需要的程序步
5. 变频器运行,闭合DI 4(r722.3=1)激活 Traversing 方式 ( P2631=1有效 )轴按设定步骤运行。

结构说明:
P2616 (No.) 每个程序步都要有一个任务号,运行时依此任务号顺序执行 ( -1 表示无效的任务)
P2621 (Job ) 表示该程序步的任务。有7 种任务供选择:Positioning (位置方式)、Endless_POS / Endless_NEG(正 / 反向速度方式)、Waiting(等待parameter 中指定的时间后执行下一步) Goto(跳转到parameter中指定的程序步) Set_O / Reset_O(置位/复位parameter 中指定的开关量输出点)
P2622 ( Parameter ) 依赖于不同的Job,对应不同的Job有不同的含义(参见List Manual)
P2623.8/9 ( Mode ) 定义定位方式,仅当任务 ( Job )为位置方式 ( Position ) 时有效
P2617/P2618/P2619/P2620 ( Position, Velocity, Acceleration, Deceleration ) 指定运动的位置,速度,加/减速
P2623.4/5/6 ( Advance ) 制定本任务结束方式。END: 本任务结束不连续执行下一任务,Continue_With_Stop: 本任务结束准确定位,电机停止后重新启动开始下一任务。Continue_Flying: 本任务结束连续执行下一任务。
P2623.0 ( Hide ) 跳过本条程序步不执行该任务。
依赖于 Job 的方式,Configuration of digital output 仅当Job 设定为 SET_O / RESET_O时有效,用于设定开关量输出。
示例:
编制一段程序:
以速度 700 LU/min, 加 / 减速为100% 运行相对位置 50000 LU 减速停止;等待 30ms;再以速度 600 LU/min, 加 / 减速为100% 运行相对位置 40000 LU 减速停止。
编制程序步如下:


七、手动数据输入(MDI)
Direct Setpoint Input / MDI (直接设定点输入方式/手动数据输入方式), MDI 的缩写来自于 NC 技术“Manual Data Input ”
使用MDI 功能我们可以很轻松地通过外部控制系统来实现复杂的定位程序,通过由上位机控制的连续变化的位置、速度来满足我们的工艺需要。
MDI 有两种不同模式:
• 位置 ( position) 模式 P2653=0、
• 手动定位或称速度模式( setting up ) P2653=1这两种模式可在线切换
速度模式是指轴按照设定的速度及加/减速运行,不考虑轴的实际位置。
位置模式是指轴按照设定的位置、速度、加/减速运行;
位置模式又可分为绝对位置 (P2648=1)和 相对位置( P2648=0)两种方式。
7.1 MDI 模式配置如下图所示

7.2 激活 MDI 方式及参数配置
1. 进入直接数据输入/ MDI 模式
2. 如上面程序步中所述:不拒绝任务 P2641=1、没有停止命令 P2640=1
运行过程中可通过断开联接与P2640的外部开关发出停止命令,则轴将以减速度P2620减速停车。
若断开联接与P2641的外部开关发出拒绝任务命令,则轴将以最大减速度P2573减速停车
3. 设定开关量输入点DI 9用于激活MDI功能(P2647为“1”有效)
4. 相关数据设置位置、速度、加 / 减速度 P2642 ~ P2645)

5. 位置模式选择 P2653
P2653=1:速度方式;P2653=0:位置方式
6. 定位方式选择 P2648
绝对位置方式:P2654=0, P2648=1;相对定位方式:P2654=**1*(16H)
7. 方向设定源 P2651、P2652
8. 数据传输形式 (P2649) 及数据设定值确认命令源( P2650)
S120 中MDI 的数据传输可采用两种形式:
连续传输 P2649=1
单步传输、由上升沿确认 P2649=0
• 所谓单步传输是指MDI 数据的传输依赖于参数 P2650 中选择的开关量信号。该命令为 “沿” 有效,每次执行完一个机器步后,需要再次施加上升沿,新的速度、位置等才能有效。
• 与单步传输不同,一旦激活连续数据传输,MDI 数据(位置、速度、加 / 减速度)可连续修改且立即有效而无需开关使能。这样我们就可通过上位机实时调整目标位置及轴的运行速度、加 / 减速度而不会停机
注:连续数据传输仅适用于绝对定位方式
7.3 调试参数
运行命令源 (ON/ OFF1)为 P840
不拒绝数据传输: P2641=1
无停止命令: P2640=1
MDI 位置模式: P2653=0/1
选择传输模式: P2649=0/1
数据设定值确认命令源 P2650 ( P2649=1时无效)
激活MDI 模式的命令源 P2647
选择绝对定位方式: P2648=1
设置目标参数:P2690、P2691、P2692、P2693
变频器运行后,激活MDI模式,轴按设定值运行。
S120的基本定位功能的更多相关文章
- (十八)WebGIS中清空功能和地图定位功能的设计以及实现
文章版权由作者李晓晖和博客园共有,若转载请于明显处标明出处:http://www.cnblogs.com/naaoveGIS/. 1.背景 当地图中增加了很多元素后,对不同的元素需要进行一定的控制,最 ...
- ionic 添加地图定位功能
由于项目需求,需要一个定位功能,通过google或百度,搜到一个cordova-plugin-geolocation的插件,在ios上可以用,但是在android就呵呵了,原因就不说了,大家都知道.所 ...
- 对于WIFI版ipad(无GPS芯片)定位功能的释疑
把玩ipad(WIFI版ipad,无GPS芯片)很久时间了,曾今有很多人(包括我)也用过它的定位功能,发现它确实很准确,通常的误差在40米以内,所以很多人都怀疑这个版本的ipad是不是真的内置了GPS ...
- iOS-系统定位功能
ios系统定位 前期准备 系统定位功能,需要用到框架:CoreLocation/CoreLocation.h, 然后导入文件#import <CoreLocation/CoreLocation. ...
- android 百度地图定位功能实现
历经几天时间,终于把定位功能给实现了,可谓是费劲千辛万苦啊,有定位知识还有图层知识,在这里我把代码给大家贴出来,一起分享一下下啦. package com.example.foreveross.off ...
- iOS定位功能
1.实现定位功能需要导入系统库MapKit.framework 2.在iPhone手机上默认是禁止手机定位的,所以,要询问系统是否开启手机定位功能. 为了开启手机定位功能,还需在info.plist中 ...
- 【第三方SDK】百度地图实现最简单的定位功能(无地图界面)
在近期的项目中,须要实现无地图界面的定位功能,定位用户所在的城市.因此,本篇文章,主要介绍怎样使用百度地图SDK实现无导航界面的定位功能. 1.申请百度开发人员账户 2.创建应用,获取key 例如以下 ...
- Android 百度地图开发(二)--- 定位功能之MyLocationOverlay,PopupOverlay的使用
转载请注明出处http://blog.csdn.net/xiaanming/article/details/11380619 这一篇文章主要讲解的是百度地图的定位功能,然后还有MyLocationOv ...
- Android定位功能
不说废话,直接说说实现android定位有关的API吧. 这些API都在android.location包下,一共有三个接口和八个类.它们配合使用即可实现定位功能. 三个接口: GpsStatus.L ...
随机推荐
- python 百宝箱
百宝箱 1. 正则表达式 删除缓存文件 os.system("/sbin/fuser -k .nfs*") os.system("rm -rf .nfs*") ...
- unittest测试框架,HTMLTestReportCN模块生成的测试报告中展示用例说明的配置方法
1.前言 想要生成的html测试报告中展示每个测试用例的说明信息,方便了解测试案例的测试点或者其他信息,目前知道的有2种 2.方法介绍 * 方法1: 要添加说明的测试用例,将说明信息用3个引号包裹起来 ...
- jQuery下载安装使用教程
一:下载jQuery 下载链接:jQuery官网 中文文档:jQuery AP中文文档 1.jQuery版本 1.x:兼容IE678,使用最为广泛的,官方只做BUG维护,功能不再新增.因此一般项目来说 ...
- 【C# Task】TaskCompletionSource
TaskCompletionSource具体功能 用于封装一个没有不带委托的任务实列.可以在其他线程控制该任务实列什么时候结束.取消.错误.类似于EventWaitHandle的功能. 属性 Task ...
- 【C#反射】Type的用法
Type属性的应用 Type type = typeof(MyClass); Console.Write("$类型名:{ type.Name}"); Console.Write(& ...
- Linux图形界面和命令界面切换
转至:https://blog.csdn.net/weixin_43683466/article/details/85727723 1.若虚拟机内热键被占用,可通过下图所示修改,移出快捷键ctrl+a ...
- Oracle sqlplus 常用命令总结
转至:https://blog.csdn.net/iteye_20746/article/details/81801309?utm_medium=distribute.pc_relevant.none ...
- 爬虫之Scrapy框架介绍及基础用法
今日内容概要 爬虫框架之Scrapy 利用该框架爬取博客园 并发编程 今日内容详细 爬虫框架Scrapy 1.什么是框架? 框架类似于房子的结构,框架会提前帮你创建好所有的文件和内部环境 你只需要往对 ...
- tf源码中的object_detection_tutorial.ipynb文件
今天看到原来下载的tf源码的目标检测源码中test的代码不知道跑哪儿去了,这里记录一下... Imports import numpy as np import os import six.moves ...
- One-Hot编码(转)
机器学习:数据预处理之独热编码(One-Hot) 前言 ---------------------------------------- 在机器学习算法中,我们经常会遇到分类特征,例如:人的性别有男女 ...