OpenCV CMake VSCode Windows 平台下运行配置及其解决方案
前言
最近在搞 计算机图形学相关的东西,有个 demo 用到了 opencv,找了 google 一圈,发现国内都没有比较好的配置和解决的办法,要不就是几年前的教程,最近正好踩坑完,其中经历了自己编译 source file,然后又用 Cmake-gui 来编译,发现都搞不定,最后直接通过下载源码,配置下环境变量即可。分享下如何在 window下 vs code 迅速运行 opencv。
环境
Microsoft Visual Studio Enterprise 2022 (64-bit) - Current Version 17.3.1
Cmake cmake version 3.21.1
opencv version 4.6.0
VS Code
VSCode 要装的插件如下:
大致需要准备的环境和信息就是上面的样子。
OpenCV 库配置
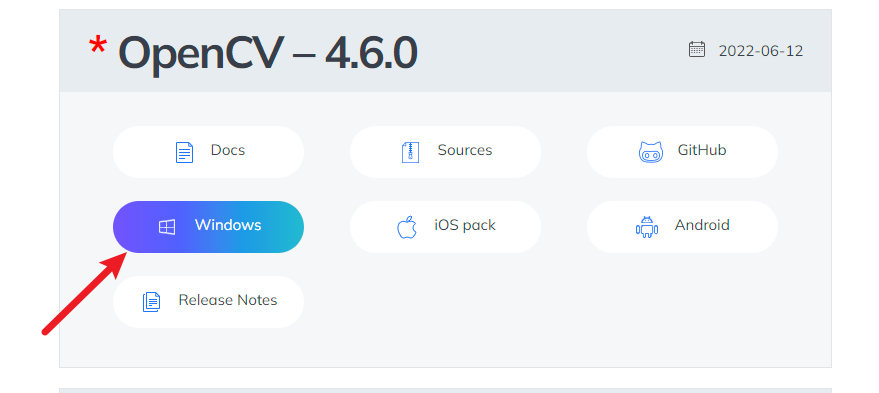
选择你的系统以及对应的平台进行下载,保存到一个你记得住的地方。
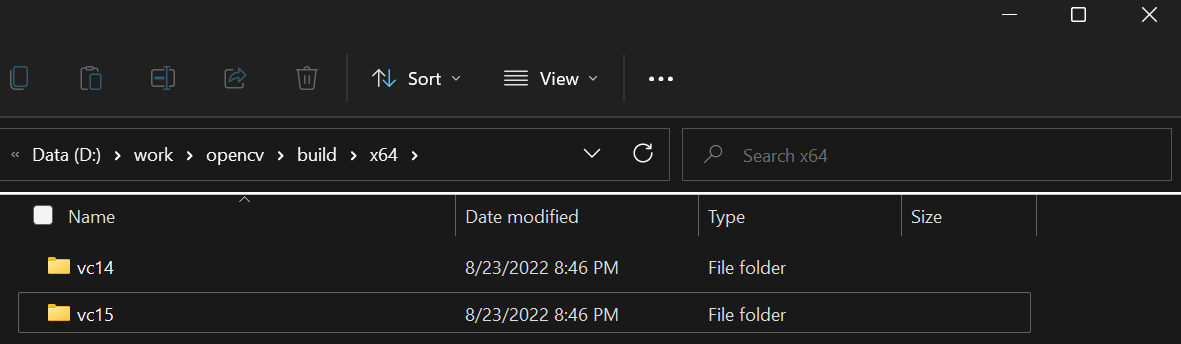
我这边存的地方如下所示,
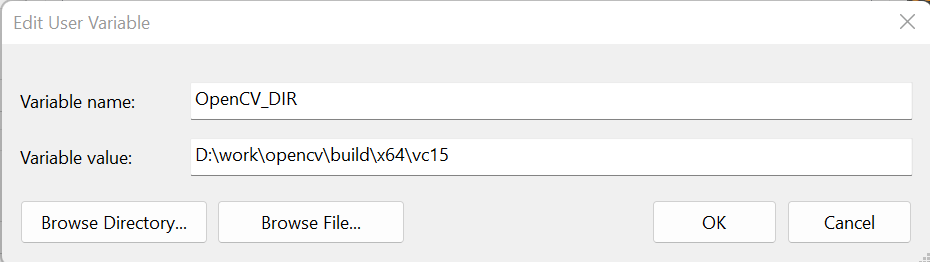
第一个是 OpenCV_DIR 配置
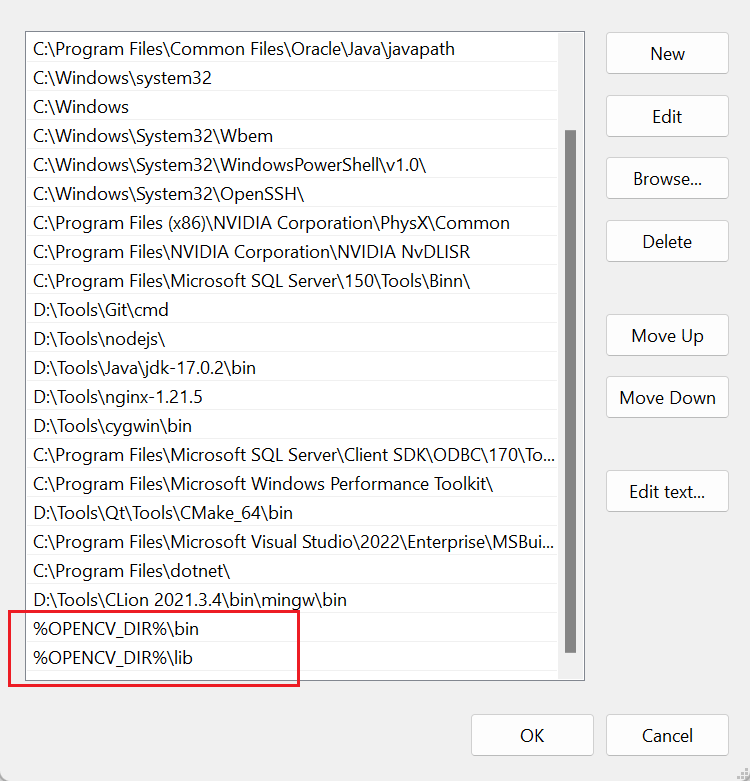
第二个是 Path 下面的配置
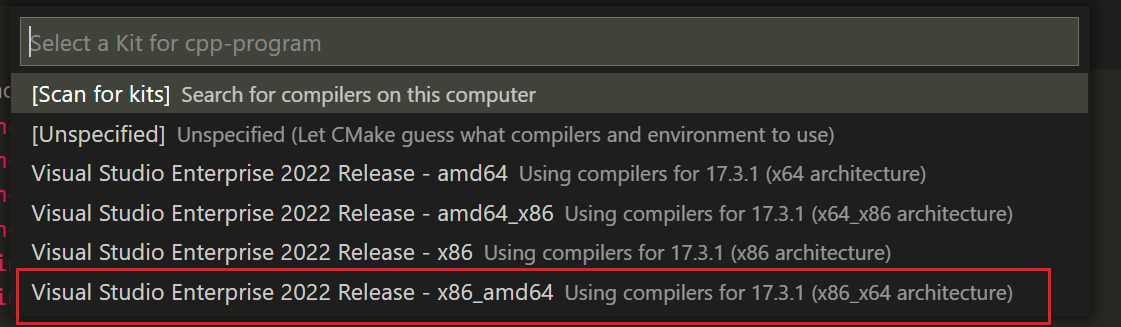
VSCode 的配置选择如下
CMakeLists.txt 配置
cmake_minimum_required(VERSION 3.21)
project(opencv_demo)
set(CMAKE_CXX_STANDARD 14)
#### OpenCV Begin ####
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
#### OpenCV End ####
add_executable(opencv_exec
main.cc
)
target_link_libraries(opencv_exec ${OpenCV_LIBS})
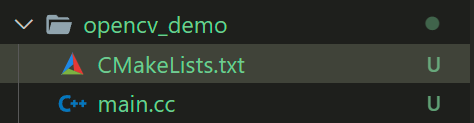
目录结构
main.cc
#include <iostream>
#include <opencv2/core.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/imgcodecs.hpp>
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
if (argc != 2) {
cout << " Usage: " << argv[0] << " ImageToLoadAndDisplay" << endl;
return -1;
}
Mat image;
image = imread(argv[1], IMREAD_COLOR); // Read the file
if (image.empty()) // Check for invalid input
{
cout << "Could not open or find the image" << std::endl;
return -1;
}
namedWindow("Display window",
WINDOW_AUTOSIZE); // Create a window for display.
imshow("Display window", image); // Show our image inside it.
waitKey(0); // Wait for a keystroke in the window
return 0;
}
运行 ./opencv_exec.exe test.png 即得到如下所示:
Demo 地址如下: https://github.com/doublnt/cpp-program/tree/main/opencv_demo
OpenCV CMake VSCode Windows 平台下运行配置及其解决方案的更多相关文章
- Django 1.6在Windows平台下的配置
Django 1.6 在Windows平台下的配置 前言 最近两天研究了下Django1.6在Windows平台中的配置安装,服务器采用Apache.期间遇到过许多新手所遇到的各种问题,也算是一种宝贵 ...
- 如何在Windows平台下安装配置Memcached
Memcached是一个自由开源的,高性能,分布式内存对象缓存系统. Memcached是以LiveJournal旗下Danga Interactive公司的Brad Fitzpatric为首开发的一 ...
- laravel + php cgi + nginx在windows平台下的配置
1.d:\xampp\php\php-cgi.exe -b 127.0.0.1:9000 -c d:\xampp\php\php.ini 2.nginx conf配置如下: #user nobody; ...
- windows平台下基于QT和OpenCV搭建图像处理平台
在之前的博客中,已经分别比较详细地阐述了"windows平台下基于VS和OpenCV"以及"Linux平台下基于QT和OpenCV"搭建图像处理框架,并 ...
- windows平台下基于VisualStudio的Clang安装和配置
LLVM 是一个开源的编译器架构,它已经被成功应用到多个应用领域.Clang是 LLVM 的一个编译器前端,它目前支持 C, C++, Objective-C 以及 Objective-C++ 等编程 ...
- 在Windows平台下安装与配置Memcached及C#使用方法
1.在Windows下安装Memcached 资料来源:http://www.jb51.net/article/30334.htm 在Windows平台下安装与配置Memcached的方法,Memca ...
- caffe学习(1):多平台下安装配置caffe
如何在 centos 7.3 上安装 caffe 深度学习工具 有好多朋友在安装 caffe 时遇到不少问题.(看文章的朋友希望关心一下我的创业项目趣智思成) 今天测试并整理一下安装过程.我是在阿 ...
- Windows平台下利用APM来做负载均衡方案 - 负载均衡(下)
概述 我们在上一篇Windows平台分布式架构实践 - 负载均衡中讨论了Windows平台下通过NLB(Network Load Balancer) 来实现网站的负载均衡,并且通过压力测试演示了它的效 ...
- [转]Windows平台下安装Hadoop
1.安装JDK1.6或更高版本 官网下载JDK,安装时注意,最好不要安装到带有空格的路径名下,例如:Programe Files,否则在配置Hadoop的配置文件时会找不到JDK(按相关说法,配置文件 ...
随机推荐
- .NET C#基础(4):属性 - 本质是方法
0. 文章目的 本文面向有一定.NET C#基础知识的学习者,介绍C#中属性的属性.定义.使用方法以及特殊性. 1. 阅读基础 理解C#基本语法(定义类及类成员,调用方法) 认可OOP的封 ...
- 【RocketMQ】MQ消息发送
消息发送 首先来看一个RcoketMQ发送消息的例子: @Service public class MQService { @Autowired DefaultMQProducer defaultMQ ...
- 【Redis】ziplist压缩列表
压缩列表 压缩列表是列表和哈希表的底层实现之一: 如果一个列表只有少量数据,并且数据类型是整数或者比较短的字符串,redis底层就会使用压缩列表实现. 如果一个哈希表只有少量键值对,并且每个键值对的键 ...
- 能快速搭建三维场景,这款3D全场景编辑器你还没用过吗?
今天就给大家分享一个非常好用的老子云3D全场景编辑器,不仅可以基于GIS数据,帮助用户快速搭建3D城市大场景.实现Web端流畅展示. 并且搭建的3D场景可离线开发成一个空间信息直观的.可交互.易于设计 ...
- NC202492 仓库选址
NC202492 仓库选址 题目 题目描述 牛能在某小城有了固定的需求,为了节省送货的费用,他决定在小城里建一个仓库,但是他不知道选在哪里,可以使得花费最小. 给出一个 \(m \times n\) ...
- NC202498 货物种类
NC202498 货物种类 题目 题目描述 某电商平台有 \(n\) 个仓库,编号从 \(1\) 到 \(n\) . 当购进某种货物的时候,商家会把货物分散的放在编号相邻的几个仓库中. 我们暂时不考虑 ...
- AspectJ和AOP细节
AspectJ1. 简介 AspectJ:Java社区里最完整最流行的AOP框架.(在Spring中AOP是一种思想,而AspectJ是一种AOP的更明确具体实现) 在Spring2.0以上版本中,可 ...
- Python迷宫生成器
作为一项古老的智力游戏,千百年来迷宫都散发着迷人的魅力.但是,手工设计迷宫费时又耗(脑)力,于是,我们有必要制作一个程序:迷宫生成器-- 好吧,我编不下去了.但是,从上面的文字中,我们可以看出,我们此 ...
- e.printStackTrace() 原理的分析
e.printStackTrace(); 先查看下源码 如图片中1所示,使用的是 PrintStreamOrWriter public void printStackTrace() { printSt ...
- ooday08 Java_多态_向下强制转型
笔记: 多态: 表现: 同一个对象被造型为不同的类型时,有不同的功能 --对象的多态:我.你.水......------所有对象都是多态的(明天体会) 同一类型的引用指向不同的对象时,有不同的实现 - ...