TV和BTV(全变分和双边全变分)
TV:Total Variation
BTV:Bilateral Total Variation
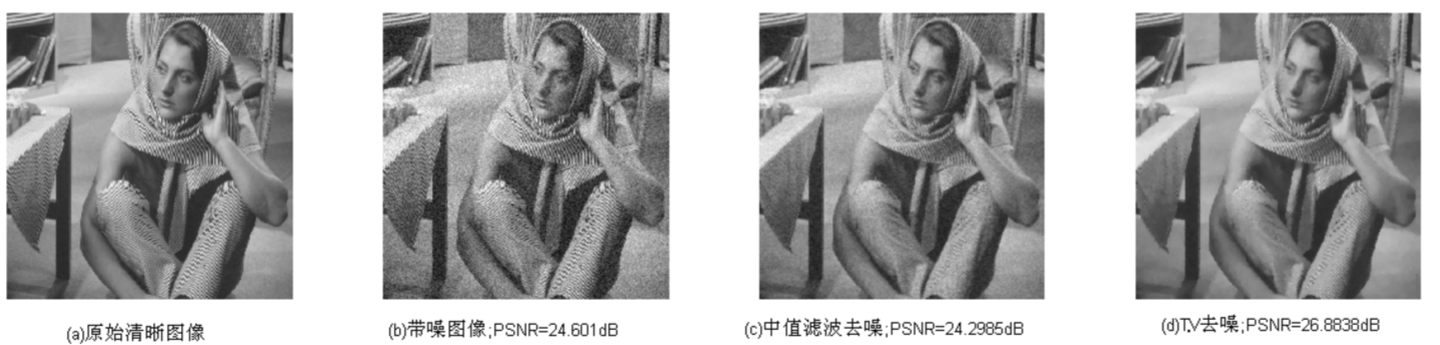
Osher等在1992 年提出了总变分(TV)超分辨率重建方法,该方法能够有效
地去除噪声和消除模糊,但是在强噪声情况下,图像的平滑区域会产生阶梯效应,
同时图像的纹理信息也不能很好地保留。
Farsiu等在2004 年提出了双边总变分(BTV)正则化方法,该方法不仅考虑了周围像素与中心像素的几何距离,同时也考虑了灰度相似性,这使得BTV 算法性能相对于TV 算法有了很大的提高。所以在几种正则化方法中, BTV 算法具有较好的重建效果,该方法不仅能够去除噪声,而且又能较好的保持图像的边缘信息。
正则化方法:
TV:很好地保持图像边缘信息。

BTV:对比原图像和将其平移整数个像素后的图像,再对两者的差求加权平均和。

p为选取窗口的半径,矩阵Sx和Sy分别为将图像Z沿x和y方向分别平移l和m个像素,alpha为尺度加权系数,其取值范围为0-1。
确定lamda值科学的方法为:在图像平滑区域,值应较大;在边缘和纹理区域,值应较小。

(在实际操作中改进,可以针对lamda值设定参数,合理lamda模型化,引入已知的先验信息。)
TV去噪模型:Rudin、Osher and Fatemi提出。
TV图像去噪模型的成功之处就在于利用了自然图像内在的正则性,易于从噪声图像的解中反映真实图像的几何正则性,比如边界的平滑性。

最小化全变分来去噪:

约束条件:

等价于最小化下式:

导出的欧拉-拉格朗日方程:
数值实现:

代码:
matlab:
function J=tv(I,iter,dt,ep,lam,I0,C)
%% Private function: tv (by Guy Gilboa).
%% Total Variation denoising.
%% Example: J=tv(I,iter,dt,ep,lam,I0)
%% Input: I - image (double array gray level -),
%% iter - num of iterations,
%% dt - time step [0.2],
%% ep - epsilon (of gradient regularization) [],
%% lam - fidelity term lambda [],
%% I0 - input (noisy) image [I0=I]
%% (default values are in [])
%% Output: evolved image if ~exist('ep')
ep=;
end
if ~exist('dt')
dt=ep/; % dt below the CFL bound
end
if ~exist('lam')
lam=;
end
if ~exist('I0')
I0=I;
end
if ~exist('C')
C=;
end
[ny,nx]=size(I); ep2=ep^; for i=:iter, %% do iterations
% estimate derivatives
I_x = (I(:,[:nx nx])-I(:,[ :nx-]))/;
I_y = (I([:ny ny],:)-I([ :ny-],:))/;
I_xx = I(:,[:nx nx])+I(:,[ :nx-])-*I;
I_yy = I([:ny ny],:)+I([ :ny-],:)-*I;
Dp = I([:ny ny],[:nx nx])+I([ :ny-],[ :nx-]);
Dm = I([ :ny-],[:nx nx])+I([:ny ny],[ :nx-]);
I_xy = (Dp-Dm)/;
% compute flow
Num = I_xx.*(ep2+I_y.^)-*I_x.*I_y.*I_xy+I_yy.*(ep2+I_x.^);
Den = (ep2+I_x.^+I_y.^).^(/);
I_t = Num./Den + lam.*(I0-I+C);
I=I+dt*I_t; %% evolve image by dt
end % for i
%% return image
%J=I*Imean/mean(mean(I)); % normalize to original mean
J=I;
C经典版:
//TV去噪函数
bool MyCxImage::TVDenoising(int iter /* = 80 */)
{
if(my_image == NULL) return false;
if(!my_image->IsValid()) return false;
//算法目前不支持彩色图像,所以对于彩图,先要转换成灰度图。
if(!my_image->IsGrayScale())
{
my_image->GrayScale();
//return false;
} //基本参数,这里由于设置矩阵C为0矩阵,不参与运算,所以就忽略之
int ep = , nx = width, ny = height;
double dt = (double)ep/5.0f, lam = 0.0;
int ep2 = ep*ep; double** image = newDoubleMatrix(nx, ny);
double** image0 = newDoubleMatrix(nx, ny);
//注意一点是CxImage里面图像存储的坐标原点是左下角,Matlab里面图像时左上角原点
for (int i = ; i < ny; i++)
{
for (int j = ; j < nx; j++)
{
image0[i][j] = image[i][j] = my_image->GetPixelIndex(j, ny-i-);
}
} double** image_x = newDoubleMatrix(nx, ny); //I_x = ( I(:,[2:nx nx]) - I(:,[1 1:nx-1]))/2;
double** image_xx = newDoubleMatrix(nx, ny); //I_xx = I(:,[2:nx nx])+I(:,[1 1:nx-1])-2*I;
double** image_y = newDoubleMatrix(nx, ny); //I_y = (I([2:ny ny],:)-I([1 1:ny-1],:))/2;
double** image_yy = newDoubleMatrix(nx, ny); //I_yy = I([2:ny ny],:)+I([1 1:ny-1],:)-2*I;
double** image_tmp1 = newDoubleMatrix(nx, ny);
double** image_tmp2 = newDoubleMatrix(nx, ny); double** image_dp = newDoubleMatrix(nx, ny); //Dp = I([2:ny ny],[2:nx nx])+I([1 1:ny-1],[1 1:nx-1 double** image_dm = newDoubleMatrix(nx, ny); //Dm = I([1 1:ny-1],[2:nx nx])+I([2:ny ny],[1 1:nx-1]); double** image_xy = newDoubleMatrix(nx, ny); //I_xy = (Dp-Dm)/4; double** image_num = newDoubleMatrix(nx, ny); //Num = I_xx.*(ep2+I_y.^2)-2*I_x.*I_y.*I_xy+I_yy.*(ep2+I_x.^2);
double** image_den = newDoubleMatrix(nx, ny); //Den = (ep2+I_x.^2+I_y.^2).^(3/2); //////////////////////////////////////////////////////////////////////////
//对image进行迭代iter次
iter = ;
for (int t = ; t <= iter; t++)
{
//进度条
my_image->SetProgress((long)*t/iter);
if (my_image->GetEscape())
break;
//////////////////////////////////////////////////////////////////////////
//计算I(:,[2:nx nx])和I(:,[1 1:nx-1])
//公共部分2到nx-1列
for (int i = ; i < ny; i++)
{
for (int j = ; j < nx-; j++)
{
image_tmp1[i][j] = image[i][j+];
image_tmp2[i][j+] = image[i][j];
}
}
for (int i = ; i < ny; i++)
{
image_tmp1[i][nx-] = image[i][nx-];
image_tmp2[i][] = image[i][];
} //计算I_x, I_xx
// I_x = ( I(:,[2:nx nx]) - I(:,[1 1:nx-1]))/2
//I_xx = I(:,[2:nx nx])+I(:,[1 1:nx-1])-2*I;
for (int i = ; i < ny; i++)
{
for (int j = ; j < nx; j++)
{
image_x[i][j] = (image_tmp1[i][j] - image_tmp2[i][j])/;
image_xx[i][j] = (image_tmp1[i][j] + image_tmp2[i][j]) - *image[i][j];
}
} //////////////////////////////////////////////////////////////////////////
//计算I([2:ny ny],:)和I([1 1:ny-1],:)
//公共部分2到ny-1行
for (int i = ; i < ny-; i++)
{
for (int j = ; j < nx; j++)
{
image_tmp1[i][j] = image[i+][j];
image_tmp2[i+][j] = image[i][j];
}
}
for (int j = ; j < nx; j++)
{
image_tmp1[ny-][j] = image[ny-][j];
image_tmp2[][j] = image[][j];
}
//计算I_xx, I_yy
// I_y = I([2:ny ny],:)-I([1 1:ny-1],:)
//I_yy = I([2:ny ny],:)+I([1 1:ny-1],:)-2*I;
for (int i = ; i < ny; i++)
{
for (int j = ; j < nx; j++)
{
image_y[i][j] = (image_tmp1[i][j] - image_tmp2[i][j])/;
image_yy[i][j] = (image_tmp1[i][j] + image_tmp2[i][j]) - *image[i][j];
}
} //////////////////////////////////////////////////////////////////////////
//计算I([2:ny ny],[2:nx nx])和I([1 1:ny-1],[1 1:nx-1])
//公共部分分别是矩阵右下角,左上角的ny-1行和nx-1列
for (int i = ; i < ny-; i++)
{
for (int j = ; j < nx-; j++)
{
image_tmp1[i][j] = image[i+][j+];
image_tmp2[i+][j+] = image[i][j];
}
}
for (int i = ; i < ny-; i++)
{
image_tmp1[i][nx-] = image[i+][nx-];
image_tmp2[i+][] = image[i][];
}
for (int j = ; j < nx-; j++)
{
image_tmp1[ny-][j] = image[ny-][j+];
image_tmp2[][j+] = image[][j];
}
image_tmp1[ny-][nx-] = image[ny-][nx-];
image_tmp2[][] = image[][];
//计算Dp = I([2:ny ny],[2:nx nx])+I([1 1:ny-1],[1 1:nx-1]);
for (int i = ; i < ny; i++)
{
for (int j = ; j < nx; j++)
{
image_dp[i][j] = image_tmp1[i][j] + image_tmp2[i][j];
}
} //////////////////////////////////////////////////////////////////////////
//计算I([1 1:ny-1],[2:nx nx])和I([2:ny ny],[1 1:nx-1])
//公共部分分别是矩阵左下角,右上角的ny-1行和nx-1列
for (int i = ; i < ny-; i++)
{
for (int j = ; j < nx-; j++)
{
image_tmp1[i+][j] = image[i][j+];
image_tmp2[i][j+] = image[i+][j];
}
}
for (int i = ; i < ny-; i++)
{
image_tmp1[i+][nx-] = image[i][nx-];
image_tmp2[i][] = image[i+][];
}
for (int j = ; j < nx-; j++)
{
image_tmp1[][j] = image[][j+];
image_tmp2[ny-][j+] = image[ny-][j];
}
image_tmp1[][nx-] = image[][nx-];
image_tmp2[ny-][] = image[ny-][]; //计算Dm = I([1 1:ny-1],[2:nx nx])+I([2:ny ny],[1 1:nx-1]);
for (int i = ; i < ny; i++)
{
for (int j = ; j < nx; j++)
{
image_dm[i][j] = image_tmp1[i][j] + image_tmp2[i][j];
}
} //////////////////////////////////////////////////////////////////////////
//计算I_xy = (Dp-Dm)/4;
for (int i = ; i < ny; i++)
{
for (int j = ; j < nx; j++)
{
image_xy[i][j] = (image_dp[i][j] - image_dm[i][j])/;
}
} //////////////////////////////////////////////////////////////////////////
//计算过程: //计算Num = I_xx.*(ep2+I_y.^2)-2*I_x.*I_y.*I_xy+I_yy.*(ep2+I_x.^2) 和 Den = (ep2+I_x.^2+I_y.^2).^(3/2);
for (int i = ; i < ny; i++)
{
for (int j = ; j < nx; j++)
{
image_num[i][j] = image_xx[i][j]*(image_y[i][j]*image_y[i][j] + ep2)
- *image_x[i][j]*image_y[i][j]*image_xy[i][j] + image_yy[i][j]*(image_x[i][j]*image_x[i][j] + ep2); image_den[i][j] = pow((image_x[i][j]*image_x[i][j] + image_y[i][j]*image_y[i][j] + ep2), 1.5);
}
} //计算I: I_t = Num./Den + lam.*(I0-I+C); I=I+dt*I_t; %% evolve image by dt
for (int i = ; i < ny; i++)
{
for (int j = ; j < nx; j++)
{
image[i][j] += dt*(image_num[i][j]/image_den[i][j] + lam*(image0[i][j] - image[i][j]));
}
}
}
//迭代结束 //////////////////////////////////////////////////////////////////////////
//赋值图像
BYTE tmp;
for (int i = ; i < ny; i++)
{
for (int j = ; j < nx; j++)
{
tmp = (BYTE)image[i][j];
tmp = max(, min(tmp, ));
my_image->SetPixelIndex(j, ny-i-, tmp);
}
} //////////////////////////////////////////////////////////////////////////
//删除内存
deleteDoubleMatrix(image_x, nx, ny);
deleteDoubleMatrix(image_y, nx, ny);
deleteDoubleMatrix(image_xx, nx, ny);
deleteDoubleMatrix(image_yy, nx, ny);
deleteDoubleMatrix(image_tmp1, nx, ny);
deleteDoubleMatrix(image_tmp2, nx, ny);
deleteDoubleMatrix(image_dp, nx, ny);
deleteDoubleMatrix(image_dm, nx, ny);
deleteDoubleMatrix(image_xy, nx, ny);
deleteDoubleMatrix(image_num, nx, ny);
deleteDoubleMatrix(image_den, nx, ny);
deleteDoubleMatrix(image0, nx, ny);
deleteDoubleMatrix(image, nx, ny); return true;
}
//////////////////////////////////////////////////////////////////////////
//开辟二维数组函数
double** MyCxImage::newDoubleMatrix(int nx, int ny)
{
double** matrix = new double*[ny]; for(int i = ; i < ny; i++)
{
matrix[i] = new double[nx];
}
if(!matrix)
return NULL;
return
matrix;
}
//清除二维数组内存函数
bool MyCxImage::deleteDoubleMatrix(double** matrix, int nx, int ny)
{
if (!matrix)
{
return true;
}
for (int i = ; i < ny; i++)
{
if (matrix[i])
{
delete[] matrix[i];
}
}
delete[] matrix; return true;
}
//////////////////////////////////////////////////////////////////////////
C简洁版:
//TV去噪函数
Mat TVDenoising(Mat img, int iter)
{
int ep = ;
int nx=img.cols;
int ny = img.rows;
double dt = 0.25f;
double lam = 0.0;
int ep2 = ep*ep; double** image = newDoubleMatrix(nx, ny);
double** image0 = newDoubleMatrix(nx, ny); for(int i=;i<ny;i++){
uchar* p=img.ptr<uchar>(i);
for(int j=;j<nx;j++){
image0[i][j]=image[i][j]=(double)p[j];
}
}
//double** image_x = newDoubleMatrix(nx, ny); //I_x = ( I(:,[2:nx nx]) - I(:,[1 1:nx-1]))/2;
//double** image_xx = newDoubleMatrix(nx, ny); //I_xx = I(:,[2:nx nx])+I(:,[1 1:nx-1])-2*I;
//double** image_y = newDoubleMatrix(nx, ny); //I_y = (I([2:ny ny],:)-I([1 1:ny-1],:))/2;
//double** image_yy = newDoubleMatrix(nx, ny); //I_yy = I([2:ny ny],:)+I([1 1:ny-1],:)-2*I;
//double** image_dp = newDoubleMatrix(nx, ny); //Dp = I([2:ny ny],[2:nx nx])+I([1 1:ny-1],[1 1:nx-1
//double** image_dm = newDoubleMatrix(nx, ny); //Dm = I([1 1:ny-1],[2:nx nx])+I([2:ny ny],[1 1:nx-1]);
//double** image_xy = newDoubleMatrix(nx, ny); //I_xy = (Dp-Dm)/4;
//double** image_num = newDoubleMatrix(nx, ny); //Num = I_xx.*(ep2+I_y.^2)-2*I_x.*I_y.*I_xy+I_yy.*(ep2+I_x.^2);
//double** image_den = newDoubleMatrix(nx, ny); //Den = (ep2+I_x.^2+I_y.^2).^(3/2); //////////////////////////////////////////////////////////////////////////
//对image进行迭代iter次
//iter = 80;
for (int t = ; t <= iter; t++){ //for (int i = 0; i < ny; i++){
// for (int j = 0; j < nx; j++){
// //I_x = (I(:,[2:nx nx])-I(:,[1 1:nx-1]))/2;
// //I_y = (I([2:ny ny],:)-I([1 1:ny-1],:))/2;
// //I_xx = I(:,[2:nx nx])+I(:,[1 1:nx-1])-2*I;
// //I_yy = I([2:ny ny],:)+I([1 1:ny-1],:)-2*I;
// //Dp = I([2:ny ny],[2:nx nx])+I([1 1:ny-1],[1 1:nx-1]);
// //Dm = I([1 1:ny-1],[2:nx nx])+I([2:ny ny],[1 1:nx-1]);
// //I_xy = (Dp-Dm)/4;
// int tmp_i1=(i+1)<ny ? (i+1) :(ny-1);
// int tmp_j1=(j+1)<nx ? (j+1): (nx-1);
// int tmp_i2=(i-1) > -1 ? (i-1) : 0;
// int tmp_j2=(j-1) > -1 ? (j-1) : 0;
// image_x[i][j] = (image[i][tmp_j1] - image[i][tmp_j2])/2;
// image_y[i][j]= (image[tmp_i1][j]-image[tmp_i2][j])/2;
// image_xx[i][j] = image[i][tmp_j1] + image[i][tmp_j2]- image[i][j]*2;
// image_yy[i][j]= image[tmp_i1][j]+image[tmp_i2][j] - image[i][j]*2;
// image_dp[i][j]=image[tmp_i1][tmp_j1]+image[tmp_i2][tmp_j2];
// image_dm[i][j]=image[tmp_i2][tmp_j1]+image[tmp_i1][tmp_j2];
// image_xy[i][j] = (image_dp[i][j] - image_dm[i][j])/4;
// image_num[i][j] = image_xx[i][j]*(image_y[i][j]*image_y[i][j] + ep2)
// - 2*image_x[i][j]*image_y[i][j]*image_xy[i][j] + image_yy[i][j]*(image_x[i][j]*image_x[i][j] + ep2);
// image_den[i][j] = pow((image_x[i][j]*image_x[i][j] + image_y[i][j]*image_y[i][j] + ep2), 1.5);
// image[i][j] += dt*(image_num[i][j]/image_den[i][j] + lam*(image0[i][j] - image[i][j]));
// }
//}
for (int i = ; i < ny; i++){
for (int j = ; j < nx; j++){
int tmp_i1=(i+)<ny ? (i+) :(ny-);
int tmp_j1=(j+)<nx ? (j+): (nx-);
int tmp_i2=(i-) > - ? (i-) : ;
int tmp_j2=(j-) > - ? (j-) : ;
double tmp_x = (image[i][tmp_j1] - image[i][tmp_j2])/; //I_x = (I(:,[2:nx nx])-I(:,[1 1:nx-1]))/2;
double tmp_y= (image[tmp_i1][j]-image[tmp_i2][j])/; //I_y = (I([2:ny ny],:)-I([1 1:ny-1],:))/2;
double tmp_xx = image[i][tmp_j1] + image[i][tmp_j2]- image[i][j]*; //I_xx = I(:,[2:nx nx])+I(:,[1 1:nx-1])-2*I;
double tmp_yy= image[tmp_i1][j]+image[tmp_i2][j] - image[i][j]*; //I_yy = I([2:ny ny],:)+I([1 1:ny-1],:)-2*I;
double tmp_dp=image[tmp_i1][tmp_j1]+image[tmp_i2][tmp_j2]; //Dp = I([2:ny ny],[2:nx nx])+I([1 1:ny-1],[1 1:nx-1]);
double tmp_dm=image[tmp_i2][tmp_j1]+image[tmp_i1][tmp_j2]; //Dm = I([1 1:ny-1],[2:nx nx])+I([2:ny ny],[1 1:nx-1]);
double tmp_xy = (tmp_dp - tmp_dm)/; //I_xy = (Dp-Dm)/4;
double tmp_num = tmp_xx*(tmp_y*tmp_y + ep2)
- *tmp_x*tmp_y*tmp_xy +tmp_yy*(tmp_x*tmp_x + ep2); //Num = I_xx.*(ep2+I_y.^2)-2*I_x.*I_y.*I_xy+I_yy.*(ep2+I_x.^2);
double tmp_den= pow((tmp_x*tmp_x + tmp_y*tmp_y + ep2), 1.5); //Den = (ep2+I_x.^2+I_y.^2).^(3/2);
image[i][j] += dt*(tmp_num/tmp_den+ lam*(image0[i][j] - image[i][j]));
}
} } Mat new_img;
img.copyTo(new_img);
for(int i=;i<img.rows;i++){
uchar* p=img.ptr<uchar>(i);
uchar* np=new_img.ptr<uchar>(i);
for(int j=;j<img.cols;j++){
int tmp=(int)image[i][j];
tmp=max(,min(tmp,));
np[j]=(uchar)(tmp);
}
} //////////////////////////////////////////////////////////////////////////
//删除内存
//deleteDoubleMatrix(image_x, nx, ny);
//deleteDoubleMatrix(image_y, nx, ny);
//deleteDoubleMatrix(image_xx, nx, ny);
//deleteDoubleMatrix(image_yy, nx, ny);
//deleteDoubleMatrix(image_dp, nx, ny);
//deleteDoubleMatrix(image_dm, nx, ny);
//deleteDoubleMatrix(image_xy, nx, ny);
//deleteDoubleMatrix(image_num, nx, ny);
//deleteDoubleMatrix(image_den, nx, ny);
deleteDoubleMatrix(image0, nx, ny);
deleteDoubleMatrix(image, nx, ny); //imshow("Image",img);
//imshow("Denosing",new_img); return new_img;
}
C简洁版修改:
void CImageObj::Total_Variation(int iter, double dt, double epsilon, double lambda)
{
int i, j;
int nx = m_width, ny = m_height;
double ep2 = epsilon * epsilon; double** I_t = NewDoubleMatrix(nx, ny);
double** I_tmp = NewDoubleMatrix(nx, ny);
for (i = ; i < ny; i++)
for (j = ; j < nx; j++)
I_t[i][j] = I_tmp[i][j] = (double)m_imgData[i][j]; for (int t = ; t < iter; t++)
{
for (i = ; i < ny; i++)
{
for (j = ; j < nx; j++)
{
int iUp = i - , iDown = i + ;
int jLeft = j - , jRight = j + ; // 边界处理
if ( == i) iUp = i; if (ny - == i) iDown = i;
if ( == j) jLeft = j; if (nx - == j) jRight = j; double tmp_x = (I_t[i][jRight] - I_t[i][jLeft]) / 2.0;
double tmp_y = (I_t[iDown][j] - I_t[iUp][j]) / 2.0;
double tmp_xx = I_t[i][jRight] + I_t[i][jLeft] - * I_t[i][j];
double tmp_yy = I_t[iDown][j] + I_t[iUp][j] - * I_t[i][j];
double tmp_xy = (I_t[iDown][jRight] + I_t[iUp][jLeft] - I_t[iUp][jRight] - I_t[iDown][jLeft]) / 4.0;
double tmp_num = tmp_yy * (tmp_x * tmp_x + ep2) + tmp_xx * (tmp_y * tmp_y + ep2) - * tmp_x * tmp_y * tmp_xy;
double tmp_den = pow(tmp_x * tmp_x + tmp_y * tmp_y + ep2, 1.5); I_tmp[i][j] += dt*(tmp_num / tmp_den + lambda*(m_imgData[i][j] - I_t[i][j]));
}
} // 一次迭代 for (i = ; i < ny; i++)
for (j = ; j < nx; j++)
{
I_t[i][j] = I_tmp[i][j];
} } // 迭代结束 // 给图像赋值
for (i = ; i < ny; i++)
for (j = ; j < nx; j++)
{
double tmp = I_t[i][j];
tmp = max(, min(tmp, ));
m_imgData[i][j] = (unsigned char)tmp;
} DeleteDoubleMatrix(I_t, nx, ny);
DeleteDoubleMatrix(I_tmp, nx, ny);
}
【转载自】
保持图像纹理特征的超分辨率重建方法研究_百度学术 http://xueshu.baidu.com/usercenter/paper/show?paperid=a89942cdaa9f99edb04b2101216541ad&site=xueshu_se
TV全变分图像去噪的研究 - 百度文库 https://wenku.baidu.com/view/00def4edb04e852458fb770bf78a6529647d3517.html
全变分(TV)模型原理与C++实现 - cyh706510441的专栏 - CSDN博客 https://blog.csdn.net/cyh706510441/article/details/45194223
VISL http://visl.technion.ac.il/~gilboa/PDE-filt/tv_denoising.html
经典的变分法图像去噪的C++实现 - InfantSorrow - 博客园 http://www.cnblogs.com/CCBB/archive/2010/12/29/1920884.html
全变分TV图像去噪 - 小魏的修行路 - CSDN博客 https://blog.csdn.net/xiaowei_cqu/article/details/18051029
全变分(TV)模型原理与C++实现 - cyh706510441的专栏 - CSDN博客 https://blog.csdn.net/cyh706510441/article/details/45194223
TV和BTV(全变分和双边全变分)的更多相关文章
- [家里蹲大学数学杂志]第057期图像复原中的改进 TV 模型
$\bf 摘要$: 本文给出了王大凯等编的<图像处理中的偏微分方程方法>第 6.2 节的详细论述. $\bf 关键词$: 图像复原; TV 模型; matlab 编程 1. 前言 图像在形 ...
- 【算法随记六】一段Matlab版本的Total Variation(TV)去噪算法的C语言翻译。
最近看到一篇文章讲IMAGE DECOMPOSITION,里面提到了将图像分为Texture layer和Structure layer,测试了很多方法,对于那些具有非常强烈纹理的图像,总觉得用TV去 ...
- 从直播编程到直播教育:LiveEdu.tv开启多元化的在线学习直播时代
2015年9月,一个叫Livecoding.tv的网站在互联网上引起了编程界的注意.缘于Pingwest品玩的一位编辑在上网时无意中发现了这个网站,并写了一篇文章<一个比直播睡觉更奇怪的网站:直 ...
- Livecoding.tv 现正举行iOS及Android App设计比赛
近日,Livecoding.tv, 一个为世界各地的程序员提供在线实时交流的平台,在其网站上发布了一篇通知, 宣布从4月15日至5月15日,会为iOS和Android的开发者举办一场本地移动app设计 ...
- 利用联合双边滤波或引导滤波进行升采样(Upsampling)技术提高一些耗时算法的速度。
这十年来,在图像处理领域提出了很多新的图像分析和处理方法,包括是自动的以及一些需要有人工参与的,典型的比如stereo depth computations.image colorization.to ...
- POJ 1966 Cable TV Network
Cable TV Network Time Limit: 1000MS Memory Limit: 30000K Total Submissions: 4702 Accepted: 2173 ...
- 学习 opencv---(8)非线性滤波:中值滤波,双边滤波
正如我们上一篇文章中讲到的,线性滤波可以实现很多种不同的图像变换.然而非线性滤波,如中值滤波器和双边滤波器,有时可以达到更好的实现效果. 邻域算子的其他一些例子还有对 二值图像进行操作的形态学算子,用 ...
- 芒果TV招聘研发工程师(JAVA PYTHON),地点长沙
长沙芒果TV招聘高级 JAVA Python 工程师,工作地点:湖南广电 有兴趣的邮件0xmalloc@gmail.com; zealotyin@qq.com 公司有一大批从北京上海一线互联网企业 ...
- Shou.TV 招聘【北京】— — 生效中
一.团队 一个牛逼又有理想的团队,Vitamio 团队原班人马,现在总共 17 人( 9 名开发),拥有成熟的技术团队以及行业一流的研发实力,特别是在移动领域视频编解码.云端处理等资深视频行业经验. ...
随机推荐
- <黑天鹅>读书笔记
书在这里 不要关注可能性,而要关注结果 不要迷信那些估值和行业发展研究文字,因为所有大家看得到的模型和研究报告都是有关白天鹅的,而你的命运或许实际掌握在黑天鹅那里 你不知道的事比你知道的事有意义 你可 ...
- JAVA字符串怎么转换成整数
首先你要确定你的字符串可以转换为int类型的,比如说: String s = "123"; 如果String s = "abc";则转换时会报错! 需要的包是& ...
- 【基础练习】【区间DP】codevs1090 加分二叉树题解
2003 NOIP TG 题目描写叙述 Description 设一个n个节点的二叉树tree的中序遍历为(l,2,3,-,n),当中数字1,2,3,-,n为节点编号.每一个节点都有一个分数(均为正整 ...
- ubuntu配置JDK
1.下载JDK jdk-8u151-linux-x64.tar.gz 2.1.解压压缩包 tar -xzvf jdk-8u151-linux-x64.tar.gz 2.2.编辑~/.bashrc ex ...
- WinForm中播放视频示例(含源码)
1背景 这几天一老友要求我做个小软件,在WinForm播放视频.印象中微软有个WM控件直接可以使用,晚上研究下 2实现方式 2.1微软草根 最简单的方式,是直接使用微软的WM控件,也是通过COM方式集 ...
- sps和pps的简单理解记录
最近博客写出了日记的既视感... 使用RTP传输H264的时候,需要用到sdp协议描述,其中有两项:Sequence Parameter Sets (SPS) 和Picture Parameter S ...
- javascript常用功能收藏
引用:http://www.css88.com/archives/5180 收集了一些比较常用的javascript函数. 字符串长度截取 function cutstr(str, len) { va ...
- http://www.gasi.ch/blog/inside-deep-zoom-2/
Inside Deep Zoom – Part II: Mathematical Analysis Welcome to part two of Inside Deep Zoom. In part o ...
- 路由策略和策略路由 & route-map
今天,这个专题应用下route-map,在这个之前,有很多内容需要掌握,不是简单的制定一个路由图就可以了. -------- 本次专题理论的东西居多,但是不是复制黏贴,是加上自己的理解思想. 第一个要 ...
- 远程操作与端口转发 SSH原理与运用
SSH不仅可以用于远程主机登录,还可以直接在远程主机上执行操作. 上一节的操作,就是一个例子: $ ssh user@host 'mkdir -p .ssh && cat >&g ...