目标追踪(Object Tracking)概念的简要介绍
现在我们有一个视频流,可以拆解出 N 个帧出来,这时候初始帧/某一帧中出现了一个我们感兴趣目标,我们希望在后续帧中对这个目标进行追踪,这时候就需要 CV 中的目标追踪;
目标追踪的效果如下:
虽然效果看起来和实时人脸检测效果一样,但是只对初始帧进行了人脸检测/识别,后续帧不需要再进行检测/识别,这也是目标跟踪可以提高程序性能的优势所在;
因为做目标追踪所需要的计算时间成本,要低于进行检测/识别的;
为了实现目标追踪,我们按照以下步骤进行:
- 对于初始帧(视频流中的第一帧),输入/通过检测算法,得到一系列目标的位置坐标;
- 为这些 ROI 创建 ID;
- 在视频流中的后续帧,寻找帧之间目标对象的关系,将帧之间的目标关联起来;
目标跟踪可以让我们对于每一个追踪的目标指定一个唯一的 ID,所以让我们可以对视频中的跟踪物体进行计数,应用于计算人数的场景;
一个理想化的目标追踪算法能够实现:
- 只需要初始化的时候进行目标检测;
- 处理速度能够很快;
- 可以处理被跟踪目标,消失或者超过边界的情况;
- 可以处理帧之间目标消失,然后再出现的特殊情况;
上图 gif 中只有一个目标,所以其实后续帧中的检测出来的目标,如果还是一个,肯定就是我们第一帧中识别出来的 person_X;
但是往往是一帧中出现多目标,我们就需要对于前后帧中的多目标进行比对匹配;
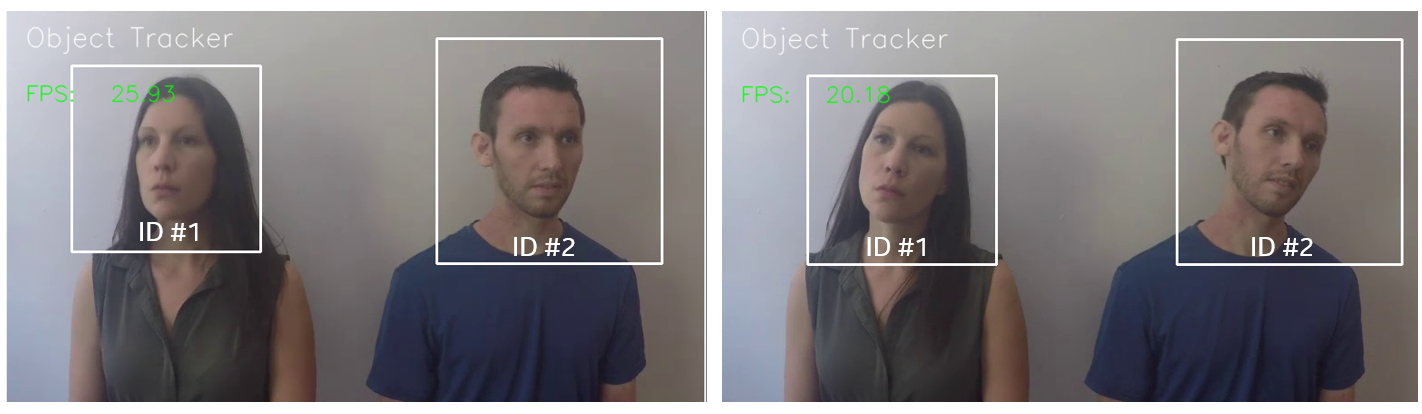
以下图为例,比如左边是第 N 帧 ,有两个目标,我们检测识别出来是 ID#1 和 ID#2,在 N+1 帧中,也检查出来两个目标,我们知道这两个目标就是 ID#1 和 ID#2,但是不知道到底哪个是 ID#1 哪个是 ID#2;

所以就需要 质心追踪算法(Centroid Tracking)来进行判定后续帧中的 ID:
质心追踪算法(Centroid Tracking),依赖于在视频流的连续帧中,比较已知目标和新出现目标之间质心的欧氏距离;
步骤一:取特征框并计算质心
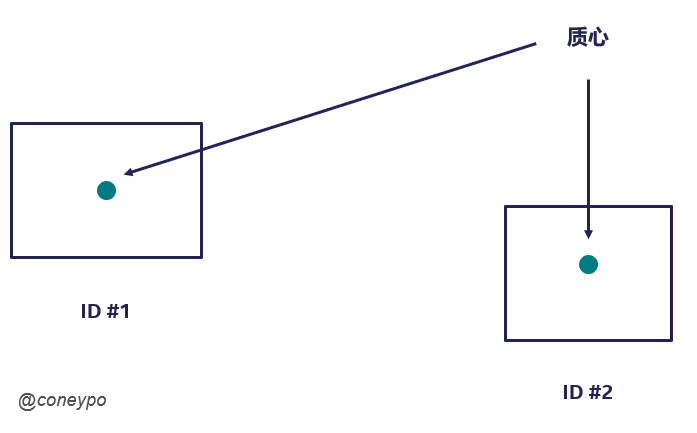
对于视频流,通过检测算法对于每帧图像进行检测;
比如上图中有两个特征框 / 或者我们假定两个特征框给它,分别为 ID #1 和 ID #2,可以计算出两个特征框的质心,分别得到位置坐标 (x,y);
以实际视频流为例:

步骤二:计算新旧目标特征框质心的欧氏距离
对于视频流中的后续帧,我们利用检测算法来计算特征框,但是我们不会再去给对于每一个检测到的物体,添加新的 ID 或者标记什么的,而是希望将新的目标能够和旧目标联系起来;
我们通过计算每对新旧目标的欧式距离来得到这些目标之间的关系;
如下图所示,比如帧 N 时候有两个目标(绿色),帧 N+1 时候有三个目标(红色),所以对于我们希望知道,这两个旧目标(绿色),在后续帧中变成了哪一个新目标(红色);
所以我们想知道如下质心之间的关系:
- 绿1->红1,绿1->红2,绿1->红3;
- 绿2->红1,绿2->红2,绿2->红3;

步骤三:更新已知目标的质心坐标
质心追踪算法的前提是:对于一个给定目标,将会在后续帧中都出现,而且在第 N 帧和 N+1 帧中的质心欧氏距离,要小于不同目标之间的欧式距离;
因此我们在视频流的连续帧之间,根据欧氏距离最小原则,将这些帧中特征框的质心联系起来,可以得到一个目标 X 在这些连续帧中的变化联系,就达到了我们目标追踪的目的;
步骤四:注册新目标
有时候会有新目标的加入,比如帧 N 的时候有 x 个目标,而帧 N+1 的时候有 x+1 个目标,增加了一个目标;
所以对于这个新增的目标,我们按照以下顺序进行注册:
- 给这个新目标一个目标 ID;
- 储存这个目标特征框的质心位置;
然后从步骤二开始,对于视频流中的每一帧进行计算欧氏距离,更新坐标等步骤;
步骤五:注销旧目标
一个目标在后续帧中可能会消失,我们的目标追踪算法也要能够处理这种情况;
但是对于消失目标的处理方法,要根据于你实际部署应用的场景;
- 第 N 帧丢失目标,注销旧目标
- 第 N 帧丢失目标,而且第 N 帧中的后续 n 帧中都没有找回来,那就注销旧目标
因为每次重新注册的成本(进行检测/识别)的成本要大于欧氏距离比对进行目标追踪的成本;
# 请尊重他人劳动成果,转载或者使用源码请注明出处:http://www.cnblogs.com/AdaminXie
# 欢迎关注我的 Github:https://github.com/coneypo/
# 如有问题请留言或者联系邮箱: coneypo@foxmail.com
目标追踪(Object Tracking)概念的简要介绍的更多相关文章
- CVPR2018 关于视频目标跟踪(Object Tracking)的论文简要分析与总结
本文转自:https://blog.csdn.net/weixin_40645129/article/details/81173088 CVPR2018已公布关于视频目标跟踪的论文简要分析与总结 一, ...
- 论文笔记:目标追踪-CVPR2014-Adaptive Color Attributes for Real-time Visual Tracking
基于自适应颜色属性的目标追踪 Adaptive Color Attributes for Real-Time Visual Tracking 基于自适应颜色属性的实时视觉追踪 3月讲的第一篇论文,个人 ...
- Multiple Object Tracking using K-Shortest Paths Optimization简要
参考文献:Multiple Object Tracking using K-Shortest Paths Optimization 核心步骤: 两步:一.detection 二.link detect ...
- Dalvik虚拟机简要介绍和学习计划
文章转载至CSDN社区罗升阳的安卓之旅,原文地址:http://blog.csdn.net/luoshengyang/article/details/8852432 我们知道,Android应用程序是 ...
- A brief introduction to weakly supervised learning(简要介绍弱监督学习)
by 南大周志华 摘要 监督学习技术通过学习大量训练数据来构建预测模型,其中每个训练样本都有其对应的真值输出.尽管现有的技术已经取得了巨大的成功,但值得注意的是,由于数据标注过程的高成本,很多任务很难 ...
- correlation filters in object tracking
http://www.cnblogs.com/hanhuili/p/4266990.html Correlation Filter in Visual Tracking系列一:Visual Objec ...
- Correlation Filter in Visual Tracking系列一:Visual Object Tracking using Adaptive Correlation Filters 论文笔记
Visual Object Tracking using Adaptive Correlation Filters 一文发表于2010的CVPR上,是笔者所知的第一篇将correlation filt ...
- 论文笔记之:Spatially Supervised Recurrent Convolutional Neural Networks for Visual Object Tracking
Spatially Supervised Recurrent Convolutional Neural Networks for Visual Object Tracking arXiv Paper ...
- 基于粒子滤波的物体跟踪 Particle Filter Object Tracking
Video来源地址 一直都觉得粒子滤波是个挺牛的东西,每次试图看文献都被复杂的数学符号搞得看不下去.一个偶然的机会发现了Rob Hess(http://web.engr.oregonstate.edu ...
随机推荐
- WSGI应用程序示例
import time # WSGI允许开发者自由搭配web框架和web服务器 def app(environ,start_response): status = '200 OK' response_ ...
- PHP cos() 函数
实例 返回不同数的余弦: <?phpecho(cos(3) . "<br>");echo(cos(-3) . "<br>");ec ...
- ORACLE表与表联接的几种方式
三大表与表联接方式 1.NESTED LOOPS 嵌套循环 2.HASH JOIN 哈希联接 3.SORT MERGE 排序合并联接 1.NESTED LOOPS 嵌套循环 嵌套循环的本质是将外部数 ...
- 【JSOI2007】文本生成器 题解(AC自动机+动态规划)
题目链接 题目大意:给定$n$个子串,要求构造一个长度为$m$的母串使得至少有一个子串是其子串.问方案数. ------------------------ 我们可以对要求进行转化:求出不合法的方案数 ...
- Semantic Monocular SLAM for Highly Dynamic Environments面向高动态环境的语义单目SLAM
一.摘要 当前单目SLAM系统能够实时稳定地在静态环境中运行,但是由于缺乏明显的动态异常处理能力,在动态场景变化与运动中往往会失败.作者为解决高度动态环境中的问题,提出一种语义单目SLAM架构,结合基 ...
- JAVAWEB开发下常见中文乱码问题解决
JAVA环境下处理中文乱码问题一直是很多人困扰的问题,像URL传参乱码,写进数据库乱码,服务写中文文字图片乱码处理及导出PDF乱码. 1:安装中文支持 yum groupinstall "f ...
- 018_go语言中的结构体
代码演示 package main import "fmt" type person struct { name string age int } func main() { fm ...
- 最全总结!聊聊 Python 调用 JS 的几种方式
1. 前言 很多人学习python,不知道从何学起.很多人学习python,掌握了基本语法过后,不知道在哪里寻找案例上手.很多已经做案例的人,却不知道如何去学习更加高深的知识.那么针对这三类人,我给大 ...
- Dubbo整合Springboot框架
本文使用的是alibaba的Dubbo. Dubbo整合Springboot可以分为四步: 第一步:首先需要了解Dubbo官方给的建议,至少有三个工程: 接口工程:主要存实体bean和业务接口 服务提 ...
- 十多位全球技术专家,为你献上近十个小时的.Net微服务介绍
.Net Conf: Focus on Microservices 是 .Net Conf 社区在 2020 年 7 月 30 日举办的线上分享活动.整个活动视频长达近 10 个小时.今天我们来看看都 ...