SLAM概念学习之特征图Feature Maps
特征图(或者叫地标图,landmark maps)利用参数化特征(如点和线)的全局位置来表示环境。如图1所示,机器人的外部环境被一些列参数化的特征,即二维坐标点表示。这些静态的地标点被观测器(装有传感器的机器人)利用多目标跟踪的方法跟踪,从而估计机器人的运动。
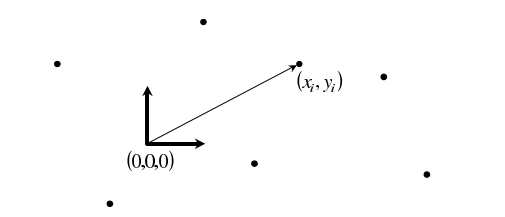
Fig.1 Feature maps.
机器人的定位是通过建立传感器观测特征和图map中特征之间的关系来确定的。预测特征的位置和量测特征位置之间的差别被用来计算机器人的位姿。这种方式,类似于多目标跟踪问题,但是不想传统的多目标跟踪问题,这里的目标群是静止的,但是观测的机器人是运动的。
先验特征图里面的地标位置被假设已知的,因此每个特征都很容易被一个参数集表示。假设机器人的量测,即从环境中提取的特征被正确地关联到图中的已有特征,我们就可以利用标准的估计技术如EKF来跟踪机器人的位姿。因此,数据关联(data association)是基于特征图的定位实现的主要弱点。
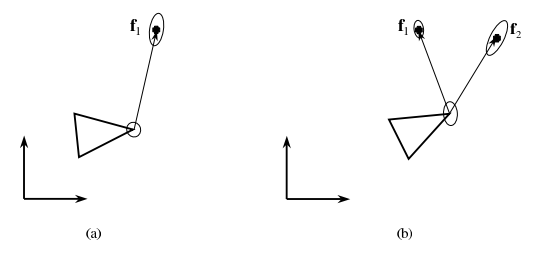
Fig.2 SLAM中不确定性的相关性分析
基于特征图的SLAM包含两个主要任务,首先需要将机器人上传感器新观测到的特征添加到Map中,新特征的添加是基于此时机器人位姿作为参考的;另一个任务是利用Map中现有的特征来估计机器人的位姿。传感器测量的不确定性将会导致机器人位姿和观测特征定位的确定,这些不确定性是相互依赖或者说相互关联的。如图2所示,在(a)中,机器人观测到f1,并初始化f1,因此该特征的定位便依赖于此时机器人的位姿。在下一个时刻(b),机器人再次观测到f1,并初始化新特征f2。因此,新特征f2的初始化便依赖于该时刻机器人的位姿估计,在初始化新特征的同时,机器人位姿的估计将反过来依赖于已观测特征f1。
下一节,我们将介绍基于Feature maps的随机SLAM算法。
SLAM概念学习之特征图Feature Maps的更多相关文章
- SLAM概念学习之随机SLAM算法
这一节,在熟悉了Featue maps相关概念之后,我们将开始学习基于EKF的特征图SLAM算法. 1. 机器人,图和增强的状态向量 随机SLAM算法一般存储机器人位姿和图中的地标在单个状态向量中,然 ...
- pytorch中网络特征图(feture map)、卷积核权重、卷积核最匹配样本、类别激活图(Class Activation Map/CAM)、网络结构的可视化方法
目录 0,可视化的重要性: 1,特征图(feture map) 2,卷积核权重 3,卷积核最匹配样本 4,类别激活图(Class Activation Map/CAM) 5,网络结构的可视化 0,可视 ...
- 卷积神经网络特征图可视化(自定义网络和VGG网络)
借助Keras和Opencv实现的神经网络中间层特征图的可视化功能,方便我们研究CNN这个黑盒子里到发生了什么. 自定义网络特征可视化 代码: # coding: utf-8 from keras.m ...
- 卷积网络中的通道(Channel)和特征图
转载自:https://www.jianshu.com/p/bf8749e15566 今天介绍卷积网络中一个很重要的概念,通道(Channel),也有叫特征图(feature map)的. 首先,之前 ...
- 深度学习之加载VGG19模型获取特征图
1.加载VGG19获取图片特征图 # coding = utf-8 import tensorflow as tf import numpy as np import matplotlib.pyplo ...
- CNN可视化技术总结(一)--特征图可视化
导言: 在CV很多方向所谓改进模型,改进网络,都是在按照人的主观思想在改进,常常在说CNN的本质是提取特征,但并不知道它提取了什么特征,哪些区域对于识别真正起作用,也不知道网络是根据什么得出了分类结果 ...
- 机器学习入门09 - 特征组合 (Feature Crosses)
原文链接:https://developers.google.com/machine-learning/crash-course/feature-crosses/ 特征组合是指两个或多个特征相乘形成的 ...
- Keras中间层输出的两种方式,即特征图可视化
训练好的模型,想要输入中间层的特征图,有两种方式: 1. 通过model.get_layer的方式.创建新的模型,输出为你要的层的名字. 创建模型,debug状态可以看到模型中,base_model/ ...
- 特征工程(Feature Engineering)
一.什么是特征工程? "Feature engineering is the process of transforming raw data into features that bett ...
随机推荐
- Zeplin(for Windows)无缝集成到了 Adobe XD
Zeplin(for Windows)无缝集成到了 Adobe XD 大约6个月前,推出了 Zeplin 的新Adobe XD CC集成.从那时起,数十万个设计从Adobe XD导出到Zeplin.Z ...
- iOS 内网内测应用发布
之前测试时,iOS 开发会把测试版本上传到蒲公英上,可以很方便的获取.后来认为不安全,万一测试版泄露了会有风险,就又回到了解放前,测试跑到开发那里编包.想过把手机越狱安装开发的编的 ipa 包,这样测 ...
- 面试题sql
查询书的价格10到20 之前显示10to20 没有显示unknown CREATE TABLE book(price INT,NAME VARCHAR(20)) SELECT NAME AS '名字' ...
- jsp基本内置标签
<jsp:foward page="url"> <jsp:param value=" " name=" "/> &l ...
- MySQL---Day2
-- 转载:http://www.cnblogs.com/yuanchenqi/articles/6357507.html CREATE TABLE employee1( id TINYINT PRI ...
- JVM 原理
0 引言 JVM一直是java知识里面进阶阶段的重要部分,如果希望在java领域研究的更深入,则JVM则是如论如何也避开不了的话题,本系列试图通过简洁易读的方式,讲解JVM必要的知识点. 1 运行流 ...
- 2.安装Cython
许多科学的Python发行版,例如Anaconda,Enthought Canopy和Sage,捆绑Cython并且不需要设置. 与大多数Python软件不同,Cython需要在系统上存在C编译器.获 ...
- mysql linux查看配置文件my.cnf位置
原文:mysql linux查看配置文件my.cnf位置 命令: mysql --help | grep 'Default options' -A 1
- JS DOM 实例(5大常用实例)
第1个实例:循环单击变色 <html lang="en"> <head> <meta charset="UTF-8"> &l ...
- jquery weui ajax滚动加载更多
手机端使用jquery weui制作ajax滚动加载更多. 演示地址:http://wx.cnkfk.com/nuol/static/fpage.html 代码: <!DOCTYPE html& ...