OpenCV 之 角点检测
角点 (corners) 的定义有两个版本:一是 两条边缘的交点,二是 邻域内具有两个主方向的特征点。
一般而言,角点是边缘曲线上曲率为极大值的点,或者 图像亮度发生剧烈变化的点。例如,从人眼角度来看,下图的 $E$ 和 $F$ 便是典型的角点

1 检测思路
在图像中定义一个局部小窗口,然后沿各个方向移动这个窗口,则会出现 a) b) c) 三种情况,分别对应平坦区、边缘和角点
a) 窗口内的图像强度,在窗口向各个方向移动时,都没有发生变化,则窗口内都是 “平坦区”,不存在角点
b) 窗口内的图像强度,在窗口向某一个 (些) 方向移动时,发生较大变化;而在另一些方向不发生变化,那么,窗口内可能存在 “边缘”
c) 窗口内的图像强度,在窗口向各个方向移动时,都发生了较大的变化,则认为窗口内存在 “角点”
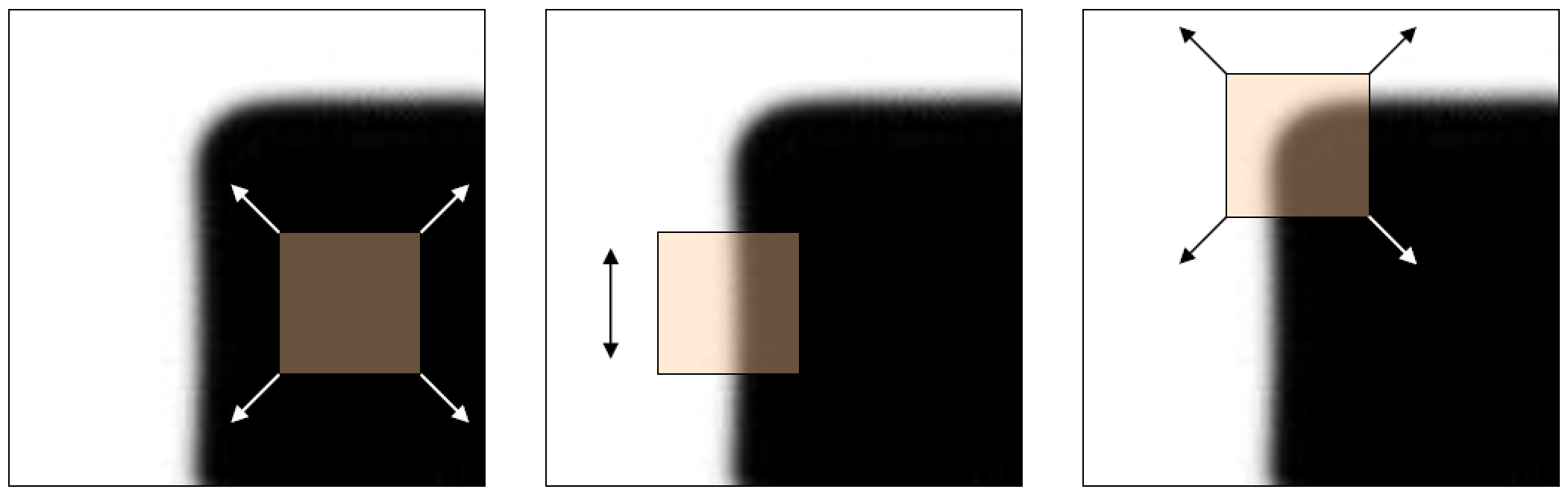
a) flat region b) edge c) corner
2 Harris 角点
2.1 公式推导
图像在点 $(x,y) $ 处的灰度值为 $I(x, y)$,当在 $x$ 方向上平移 $u$,且 $y$ 方向上平移 $v$ 时,图像灰度值的变化为
$ \qquad E(u,v) = \sum\limits_{x,y} \, \underbrace{w(x,y)}_\text{window function} \; [\underbrace{I(x+u, y+v)}_\text{shifted intensity} - \underbrace{I(x, y)}_\text{intensity}]^2 $
一阶泰勒级数近似展开得
$ \qquad \sum\limits_{x,y} \; [I(x+u, y+v) - I(x, y)]^2 \approx \sum\limits_{x,y} \; [I(x, y) +uI_x + vI_y - I(x, y)]^2 = \sum\limits_{x,y} \; [u^2I_x^2 + 2uvI_x I_y + v^2I_y^2 ] $
写成矩阵形式
$ \qquad E(u,v) \approx \begin{bmatrix} u & v \end{bmatrix} \left ( \displaystyle \sum_{x,y} w(x,y) \begin{bmatrix} I_x^{2} & I_{x}I_{y} \\ I_xI_{y} & I_{y}^{2} \end{bmatrix} \right ) \begin{bmatrix} u \\ v \end{bmatrix}$
则有
$ \qquad E(u,v) \approx \begin{bmatrix} u & v \end{bmatrix} M \begin{bmatrix} u \\ v \end{bmatrix}$, 假定 $ M = \displaystyle \sum_{x,y} w(x,y) \begin{bmatrix} I_x^{2} & I_{x}I_{y} \\ I_xI_{y} & I_{y}^{2} \end{bmatrix}$
2.2 判别方法
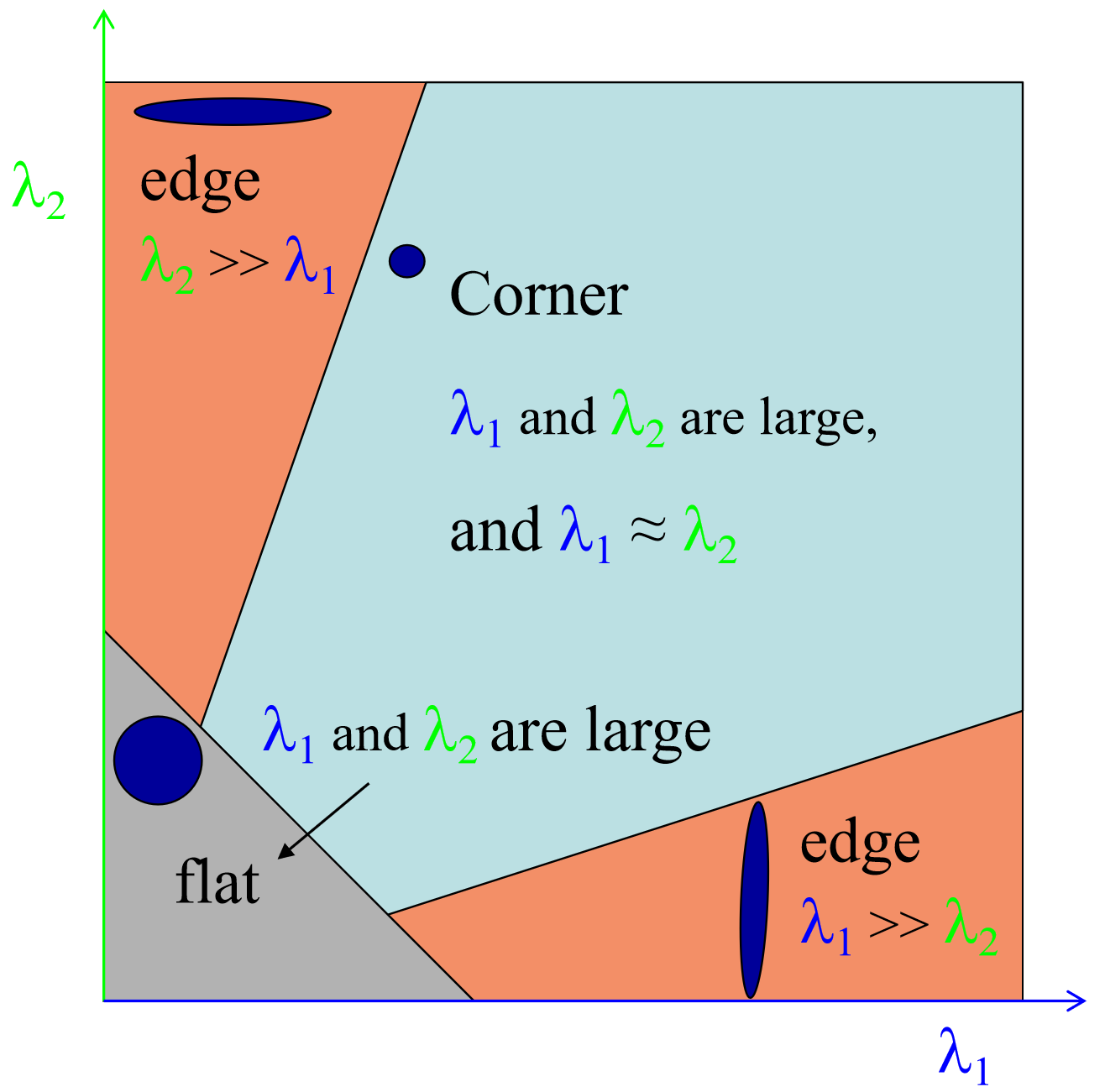
定义一个角点响应值$\qquad R = det(M) - k(trace(M))^{2} = \lambda_{1} \lambda_{2} - k (\lambda_{1}+\lambda_{2})^2 $
根据响应值的大小,判断小窗口内是否包含角点:
1) “平坦区”:|R| 小的区域,即 $\lambda_1$ 和 $\lambda_2$ 都小;
2) “边缘”: R <0 的区域,即 $\lambda_1 >> \lambda_2$ 或反之;
3) “角点”: R 大的区域,即 $\lambda_1$ 和 $\lambda_2$ 都大且近似相等
为了便于直观理解,绘制成 $\lambda_1-\lambda_2$ 平面如下图:
2.3 cornerHarris()
OpenCV 中 Harris 角点检测的函数为:
void cv::cornerHarris (
InputArray src, // 输入图像 (单通道,8位或浮点型)
OutputArray dst, // 输出图像 (类型 CV_32FC1,大小同 src)
int blockSize, // 邻域大小
int ksize, // Sobel 算子的孔径大小
double k, // 经验参数,取值范围 0.04 ~ 0.06
int borderType = BORDER_DEFAULT // 边界模式
)
2.4 代码示例
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp" using namespace cv;
// Harris corner parameters
int kThresh = 150;
int kBlockSize = 2;
int kApertureSize = 3;
double k = 0.04; int main()
{
// read image
Mat src, src_gray;
src = imread("building.jpg");
if(src.empty())
return -1; cvtColor(src, src_gray, COLOR_BGR2GRAY); Mat dst, dst_norm, dst_norm_scaled;
// Harris corner detect
cornerHarris(src_gray, dst, kBlockSize, kApertureSize, k); normalize(dst, dst_norm, 0, 255, NORM_MINMAX, CV_32FC1);
convertScaleAbs(dst_norm, dst_norm_scaled); // draw detected corners
for(int j=0; j < dst_norm.rows; j++)
{
for(int i=0; i<dst_norm.cols;i++)
{
if((int)dst_norm.at<float>(j,i) > kThresh)
{
circle(src, Point(i, j), 2, Scalar(0,255,0));
}
}
} imshow("harris corner", src); waitKey(0);
}
检测结果:

3 Shi-Tomasi 角点
Shi-Tomasi 角点是 Harris 角点的改进,在多数情况下,其检测效果要优于 Harris。二者的区别在于,Shi-Tomasi 选取 $\lambda_1$ 和 $\lambda_2$ 中的最小值,作为新的角点响应值 $R$
$\qquad R = min(\lambda_1, \lambda_2) $
则相应的 $\lambda_1-\lambda_2$ 平面为:

3.1 goodFeaturesToTrack()
OpenCV 中 Shi-Tomasi 角点检测函数为:
void cv::goodFeaturesToTrack (
InputArray image, // 输入图像 (单通道,8位或浮点型32位)
OutputArray corners, // 检测到的角点
int maxCorners, // 最多允许返回的角点数量
double qualityLevel, //
double minDistance, // 角点间的最小欧拉距离
InputArray mask = noArray(), //
int blockSize = 3, //
bool useHarrisDetector = false, //
double k = 0.04 //
)
3.2 代码示例
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp" using namespace cv;
using namespace std; int kMaxCorners = 1000;
double kQualityLevel = 0.1;
double kMinDistance = 1; int main()
{
// read image
Mat src, src_gray;
src = imread("building.jpg");
if (src.empty())
return -1; cvtColor(src, src_gray, COLOR_BGR2GRAY);
// Shi-Tomasi corner detect
vector<Point2f> corners;
goodFeaturesToTrack(src_gray, corners, kMaxCorners, kQualityLevel, kMinDistance); // draw and show detected corners
for (size_t i = 0; i < corners.size(); i++)
{
circle(src, corners[i], 2.5, Scalar(0, 255, 0));
}
imshow("Shi-Tomasi corner", src); waitKey(0);
}
检测结果:

4 角点检测的实现
在 OpenCV 中分析 cornerHarris() 函数的源码,得到实现步骤如下:sobel 算子求解 dx 和 dy -> 矩阵 M -> boxFilter -> 每个像素的角点响应值 R
代码实现:
#include <iostream>
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp" using namespace cv;
using namespace std; int kApertureSize = 3;
int kBlockSize = 2;
double k = 0.04;
int kThresh = 150; int main()
{
// read image
Mat src, src_gray;
src = imread("chessboard.png");
if (src.empty())
return -1; cvtColor(src, src_gray, COLOR_BGR2GRAY);
// scale
int depth = src_gray.depth();
double scale = (double)(1 << (2* kBlockSize)); if (depth == CV_8U)
scale *= 255.0;
scale = 1.0 / scale; // 1) dx, dy
Mat Dx, Dy;
Sobel(src_gray, Dx, CV_32F, 1, 0, kApertureSize, scale);
Sobel(src_gray, Dy, CV_32F, 0, 1, kApertureSize, scale); // 2) cov
Size size = src_gray.size();
Mat cov(size, CV_32FC3); for (int i = 0; i < size.height; i++)
{
float* cov_data = cov.ptr<float>(i);
const float* dxdata = Dx.ptr<float>(i);
const float* dydata = Dy.ptr<float>(i); for (int j=0; j < size.width; j++)
{
float dx = dxdata[j];
float dy = dydata[j]; cov_data[j * 3] = dx * dx;
cov_data[j * 3 + 1] = dx * dy;
cov_data[j * 3 + 2] = dy * dy;
}
} // 3) boxfilter
boxFilter(cov, cov, cov.depth(), Size(kBlockSize, kBlockSize)); // 4) R
Mat dst(size,CV_32FC1);
Size size_cov = cov.size(); for (int i = 0; i < size_cov.height; i++)
{
const float* ptr_cov = cov.ptr<float>(i);
float* ptr_dst = dst.ptr<float>(i); for (int j=0; j < size_cov.width; j++)
{
float a = ptr_cov[j * 3];
float b = ptr_cov[j * 3 + 1];
float c = ptr_cov[j * 3 + 2];
ptr_dst[j] = (float)(a * c - b * b - k * (a + c) * (a + c));
}
} // 5) normalize
Mat dst_norm, dst_norm_scaled;
normalize(dst, dst_norm, 0, 255, NORM_MINMAX, CV_32FC1);
convertScaleAbs(dst_norm, dst_norm_scaled); // 6) draw detected corners
for (int j = 0; j < dst_norm.rows; j++)
{
for (int i = 0; i < dst_norm.cols; i++)
{
if ((int)dst_norm.at<float>(j, i) > 150)
{
circle(src, Point(i, j), 2, Scalar(0, 255, 0));
}
}
} imshow("Harris corner", src); waitKey(0);
}
5 亚像素角点检测
亚像素角点的提取函数 cornerSubPix(),常用于相机标定中,定义如下:
5.1 cornerSubpix()
void cv::cornerSubPix(
InputArray image, // 输入图象(单通道,8位或浮点型)
InputOutputArray corners, // 亚像素精度的角点坐标
Size winSize, // 搜索窗口尺寸的 1/2
Size zeroZone, //
TermCriteria criteria // 迭代终止准则
)
5.2 代码示例
#include <iostream> #include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp" using namespace cv;
using namespace std; int kMaxCorners = 40;
double kQualityLevel = 0.01;
double kMinDistance = 50; int main()
{
// 1) read image
Mat src, src_gray;
src = imread("chessboard.png");
if (src.empty())
return -1; cvtColor(src, src_gray, COLOR_BGR2GRAY);
// 2) Shi-Tomasi corner detect
vector<Point2f> corners;
goodFeaturesToTrack(src_gray, corners, kMaxCorners, kQualityLevel, kMinDistance); // 3) draw and show detected corners
for (size_t i = 0; i < corners.size(); i++)
{
circle(src, corners[i], 3, Scalar(0, 255, 0));
}
imshow("Shi-Tomasi corner", src); TermCriteria criteria = TermCriteria(TermCriteria::EPS + TermCriteria::COUNT, 40, 0.001);
// 4) find corner positions in subpixel
cornerSubPix(src_gray, corners, Size(5, 5), Size(-1, -1), criteria);
// 5) output subpixel corners
for (size_t i = 0; i < corners.size(); i++)
{
cout << "Corner[" << i << "]: (" << corners[i].x << "," << corners[i].y << ")" << endl;
}
waitKey(0);
}
输入棋盘格5行8列,对应7x4个角点,图像的分辨率为 600*387,则所有角点的理论坐标如下表:
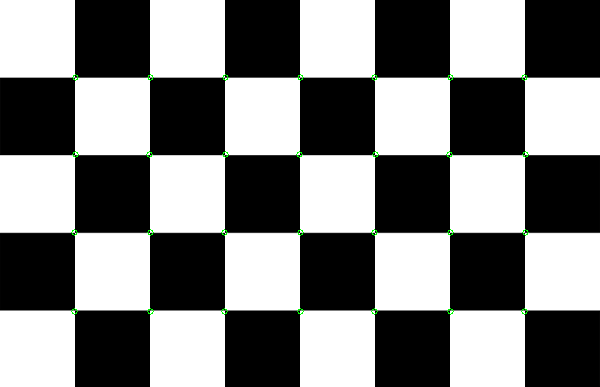

角点的图象坐标值输出如下:

参考资料:
《图像局部不变性特征与描述》 第 3 章
https://www.cnblogs.com/ronny/p/4009425.html
http://www.cse.psu.edu/~rtc12/CSE486/
OpenCV Tutorials / feature2d module / Harris corner detector
OpenCV-Python Tutorials / Feature Detection and Description / Shi-Tomasi Corner Detector & Good Features to Track
OpenCV Tutorials / feature2d module / Creating your own corner detector
OpenCV Tutorials / feature2d module / Detecting corners location in subpixels
OpenCV 之 角点检测的更多相关文章
- 【OpenCV】角点检测:Harris角点及Shi-Tomasi角点检测
角点 特征检测与匹配是Computer Vision 应用总重要的一部分,这需要寻找图像之间的特征建立对应关系.点,也就是图像中的特殊位置,是很常用的一类特征,点的局部特征也可以叫做“关键特征点”(k ...
- OpenCV Shi-Tomasi角点检测子
Shi-Tomasi角点检测子 目标 在这个教程中我们将涉及: 使用函数 goodFeaturesToTrack 来调用Shi-Tomasi方法检测角点. 理论 代码 这个教程的代码如下所示.源代码还 ...
- OpenCV Harris 角点检测子
Harris 角点检测子 目标 本教程中我们将涉及: 有哪些特征?它们有什么用? 使用函数 cornerHarris 通过 Harris-Stephens方法检测角点. 理论 有哪些特征? 在计算机视 ...
- Opencv Shi-Tomasi角点检测
#include <iostream>#include <opencv2/opencv.hpp> using namespace std;using namespace cv; ...
- Opencv Harris角点检测
#include <iostream>#include <opencv2/opencv.hpp> using namespace std;using namespace cv; ...
- OPENCV(6) —— 角点检测
图像特征的类型通常指边界.角点(兴趣点).斑点(兴趣区域).角点就是图像的一个局部特征,应用广泛.harris角点检测是一种直接基于灰度图像的角点提取算法,稳定性高,尤其对L型角点检测精度高,但由于采 ...
- opencv::自定义角点检测
#include <opencv2/opencv.hpp> #include <iostream> #include <math.h> using namespac ...
- opencv笔记6:角点检测
time:2015年10月09日 星期五 23时11分58秒 # opencv笔记6:角点检测 update:从角点检测,学习图像的特征,这是后续图像跟踪.图像匹配的基础. 角点检测是什么鬼?前面一篇 ...
- opencv: 角点检测源码分析;
以下6个函数是opencv有关角点检测的函数 ConerHarris, cornoerMinEigenVal,CornorEigenValsAndVecs, preConerDetect, coner ...
随机推荐
- 国产网络损伤仪 SandStorm -- 只需要拖拽就能删除链路规则
国产网络损伤仪SandStorm可以模拟出带宽限制.时延.时延抖动.丢包.乱序.重复报文.误码.拥塞等网络状况,在实验室条件下准确可靠地测试出网络应用在真实网络环境中的性能,以帮助应用程序在上线部署前 ...
- Node.js Spider
Node.js Spider How To Write a Spider using JavaScript, in order to auto download some svg images for ...
- iPad Pro 涂鸦绘画实用技巧
iPad Pro 涂鸦绘画实用技巧 绘画,涂鸦,简笔画 pre-requirement iPad Pro Apple Pencil 实用技巧 zoom in, zoom out 应用矢量的特性,灵活缩 ...
- github & webhooks
github & webhooks git auto commit bash shell script https://developer.github.com/webhooks/ POST ...
- pull down/pull up refresh & UI Components
pull down/pull up refresh & UI Components 下拉/上拉刷新 https://mint-ui.github.io/docs/#/zh-cn2/loadmo ...
- 教你玩转CSS Position(定位)
CSS Position(定位) position 属性指定了元素的定位类型. position 属性的五个值: static relative fixed absolute sticky 元素可以使 ...
- C++算法代码——扫雷游戏
题目来自:http://218.5.5.242:9018/JudgeOnline/problem.php?id=1685 题目描述 扫雷游戏是一款十分经典的单机小游戏. 在 n 行 m 列的雷区中有一 ...
- 字节码增强技术-Byte Buddy
本文转载自字节码增强技术-Byte Buddy 为什么需要在运行时生成代码? Java 是一个强类型语言系统,要求变量和对象都有一个确定的类型,不兼容类型赋值都会造成转换异常,通常情况下这种错误都会被 ...
- Prometheus时序数据库-内存中的存储结构
Prometheus时序数据库-内存中的存储结构 前言 笔者最近担起了公司监控的重任,而当前监控最流行的数据库即是Prometheus.按照笔者打破砂锅问到底的精神,自然要把这个开源组件源码搞明白才行 ...
- 修改yapf中的列宽限制值
yapf是一款由Google开源的Python代码自动格式化工具,它根据PEP 8规范可以帮我们自动格式化我们的代码,让代码更规范.更漂亮.但是其中最大列宽被限制为80,如果超过80,在格式化时就会被 ...