SAE自动驾驶分级介绍
SAE International 国际自动机工程师学会(原译:美国汽车工程师学会)英文全程为:Society of Automotive Engineers International,是一个全球性的非常活跃且专业的标准研究组织。对于各类工程领域均有涉及,且汽车领域(Automotive)为其主要聚焦领域。
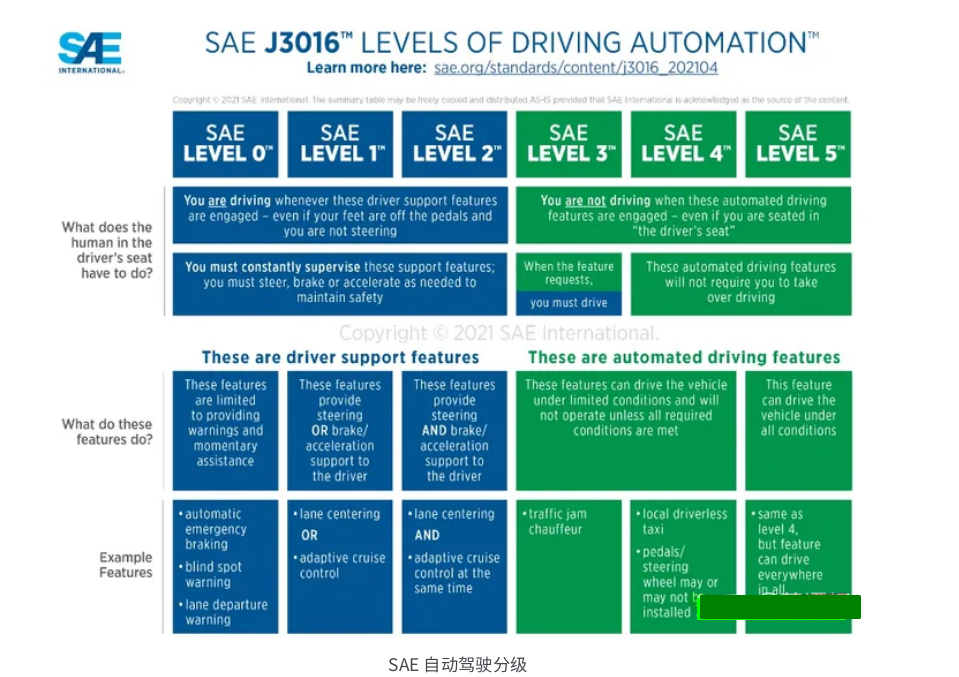
SAE驾驶自动化分级自2014年发布以来,是业内最多引用的用以描述自动(辅助)驾驶等级的信息源。该标准经过数次修订,目前最新版本为2021年Revise版,将驾驶自动化(DrivingAutomation)分为六个等级:从Level 0 到Level 5。分别如下:
SAE驾驶自动化分级 :Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems
下来基于最新版本的J3016-202104,来简述一下SAE分级中的相关术语和知识要点。
关于202104版本的Release Notes,可以参考SAE Levels of Driving Automation Refined forClarity and International Audience
1,Level 0: No Driving Automation:系统会提供告警,或者是短暂的(momentary)控制。驾驶员是车辆持续性行为的唯一决策者,需要控制方向盘,油门,刹车等一切控制装置。典型功能:LDW(lane departure warning ,车道偏离预警),AEB(Automatic emergency braking,自动紧急刹车),(注),BSD(Blind Spot Warning,盲点预警)等;
2,Level1: Driver Assistance 系统会提供横向(转向)或者纵向(制动和加速)的车辆控制。可以辅助驾驶员进行横向或者(注意这个OR)纵向的驾驶辅助控制。如LKA(Lane KeepingAssistance,车道保持辅助),ACC(Adaptive Cruise control,自适应巡航控制)等;
3,level2: Partial Driving Automation 与上一级的区别在于,L2系统可以同时进行横向和纵向车辆控制(KLA AND ACC),主动保持和前车距离的同时,纠正车辆在车道内的横向位置,保持在车道中间行驶。和L1的区别在于:系统是否同时控制横向和纵向。现在常见的我们已知的LCC(Lane-Center-Control),AP等均属于这个等于的自动驾驶。
注意:在2021-04的J3016-levels of DrivingAutomation文件中,非常明确的将L1/L2系统命名
为:驾驶员支持系统(Driver Support System),以区别与L3-L5的自动驾驶系统(Automated
Driving System),来明确不同层级系统的驾驶活动中,人类驾驶员的责任。
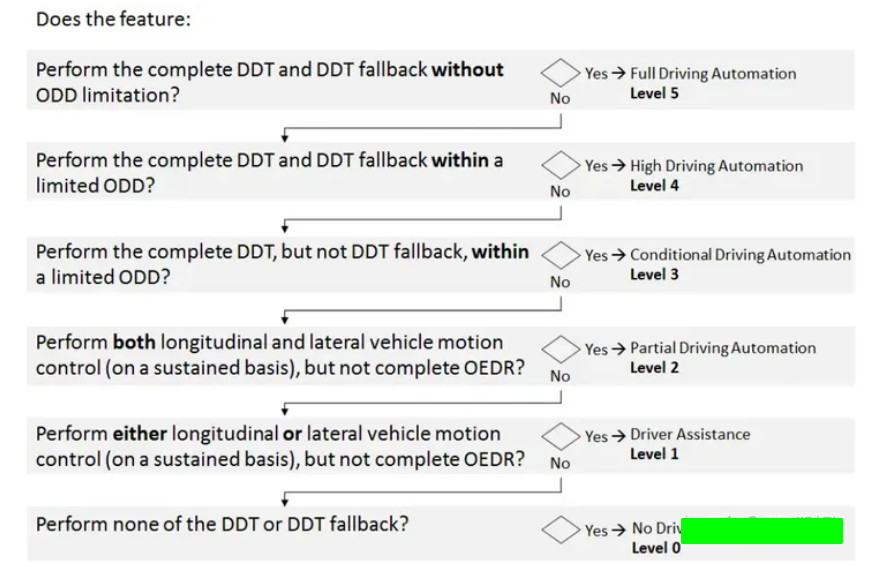
4,Level3:Conditional Driving Automation 迈入L3的门槛,如上文所述,意味着在一定条件下,系统驾驶权与责任全部交给自动驾驶系统,不符合条件时,系统报出接管请求,并预留一定时间(欧盟法律为8秒),由驾驶员接管车辆。
也就意味着,和L2相比,L3对于普通消费者和其他交通参与者而言,最大的价值在于定责。L2本质上还是一个人类驾驶负全部责任的系统,而在L3系统中,一旦L3生效,发生事故的责任是车企或者L3系统提供方。
5,Level4:High Driving Automation 不需要驾驶员监控路况与系统情况,能在一定ODD之内(一般情况下为地理围栏/天气/光照等条件限制)自主行驶的系统。与L3相比,最大的区别是:当系统出现不能满足自动驾驶条件的工况时(在ODD之外时),可以自动给出DDT Fallback,从而达到MRC(Minimal Risk Condition,在极少数灾难性(比如主备电源均失效等)情况下,执行FMS(Failure Mitigation Strategy)
DDT fallback:指的是系统在执行Dynamic Driving Task过程中,如果系统故障或者超出ODD,需要有一个备用策略,以确保ego可以达到MRC状态
6,Level 5:(e):完全自动化。在任何条件下, 任何地方,都能实现全自动驾驶,完全不需要人类驾
驶员。
整体可以用标准中的下图,清晰的界定每个等级自动驾驶的关键区别:
所以其实从SAE分级也可以比较明确的看出来:目前国内外各个量产的智能驾驶系统,都对应了SAE分级中的L2级别,强调人类司机驾驶员必须实时在环,随时接管车辆,系统只是辅助;
对于整个行业而言,L4不可能一蹴而就,目前处于L2向L3演进的时间段。目前国内已经有相关法规征求稿,对L3辅助驾驶进行立法。国内已经车企L3正在路上,当然开始的ODD一定非常狭窄(高速+有HDMAP+跟车工况+特定速度区域),不过这毕竟是大家向着更高等级自动驾驶迈入的
一小步,相信不久的将来,就会有“遥遥领先”的L3级自动驾驶车辆上路,敬请期待。(手动Doge)
附上:自动驾驶最强最全学习资料:https://www.cnblogs.com/autodriver/articles/18071484
SAE自动驾驶分级介绍的更多相关文章
- zz“老司机”成长之路:自动驾驶车辆调试实践
随着自动驾驶技术的发展,一辆新车从被改装到上路需要经过的调试流程也有了许多提升.今天,我希望结合自己之前的调车经验来跟大家分享一下我们是如何将系统的各个模块逐步上车.调试.集成,进而将一辆“新手”车培 ...
- Google Waymo 2017自动驾驶安全技术报告(一)
2017年10月Google Waymo向美国交通部提交了一份43页的安全报告,报告中详细说明了Waymo如何装备和训练自动驾驶车辆,从而避免驾驶中的一般和意外情况发生.这份报告对Waymo的自动驾驶 ...
- L3级自动驾驶
L3级自动驾驶 2020年开年 3月9日,工信部在其官网公示了<汽车驾驶自动化分级>推荐性国家标准报批稿,并拟于2021年1月1日开始实施. 按照中国自身标准制定的自动驾驶分级标准,在千呼 ...
- <转载> 从算法上解读自动驾驶是如何实现的?
科技新闻小鹏汽车2016-03-28 10:42 [摘要]车辆路径规划问题中路网模型.路径规划算法和交通信息的智能预测为关键点. 由于驾驶员的驾驶工作繁重,同时随着汽车拥有量的增加,非职业驾驶员的数 ...
- 开源自动驾驶仿真平台 AirSim (1) - Unreal Engine
AirSim 官方Github: https://github.com/Microsoft/AirSim AirSim 是微软的开源自动驾驶仿真平台(其实它还能做很多事情,这里主要用于自动驾驶仿真研究 ...
- julia应用于自动驾驶汽车、机器人、3D 打印、精准医疗、增强现实、基因组学、能源交易、机器学习、金融风控和太空任务设计等多个领域
编程界的新宠 Julia 发布 1.0 正式版本,多种优势集于一身2018-08-14 14:14 公司Julia 的累积下载次数超过 200 万,已被应用于自动驾驶汽车.机器人.3D 打印.精准医疗 ...
- 自动驾驶缺人才?听听David Silver怎么说!
如今自动驾驶在全球范围内的发展势头愈发“凶猛”,该领域人才也一度被视为“香饽饽”. 即使在美国,自动驾驶工程师的起薪也已经突破了25万美元,我国‘“开价”之高更是令人咋舌. 人才.人才.还是人才!重要 ...
- zz自动驾驶中轨迹规划的探索和挑战
大家好,今天我们主要介绍一下轨迹规划的探索和挑战,我主要从四个方面介绍: 轨迹规划的概念 决策 横向规划 纵向规划 轨迹规划的概念: 轨迹规划的核心就是要解决车辆该怎么走的问题.比如我们知道了附近有行 ...
- zz自动驾驶复杂环境下高精度定位技术
今天为大家分享下,自动驾驶在复杂环境下的高精度定位技术. 定位/导航负责实时提供载体的运动信息,包括载体的:位置.速度.姿态.加速度.角速度等信息. 自动驾驶对定位系统的基本要求: 1. 高精度:达到 ...
- zz高精地图和定位在自动驾驶的应用
本次分享聚焦于高精地图在自动驾驶中的应用,主要分为以下两部分: 1. 高精地图 High Definition Map 拓扑地图 Topological Map / Road Graph 3D栅格地图 ...
随机推荐
- MySQL 之高级命令(精简笔记)
MySQL是一个关系型数据库管理系统,由瑞典MySQL AB 公司开发,目前属于 Oracle 旗下产品.MySQL 是最流行的关系型数据库管理系统之一,在 WEB 应用方面,MySQL是最好的 RD ...
- 使用Nuget快速集成.Net三维控件
据老一辈的程序员说开发三维程序门槛很高,需要学若干年才能入门,自从遇上AnyCAD三维控件后,开发三维应用变的简单了.当结合nuget后,一切更简单了. 1 准备工作 安装VS201x以后,就可以开始 ...
- 设置两个Chrome浏览器 一个正常使用 一个无图片版
添加两个Chrome浏览器 双击打开Chrome浏览器,点击右上角头像,点击添加 选择"在不登录帐号的情况下继续",创建一个名字,选个配色,勾选下面的创建桌面快捷方式 此时会打开一 ...
- PHP操作数据分页
PHP操作数据分页 一.数据库安全 string addslashes ( string $str ) 返回字符串,该字符串为了数据库查询语句等的需要在某些字符前加上了反斜线.这些字符是单引号('). ...
- maven 私服 500 错误 nexus
扩大了硬盘就好了
- sensitive-word 敏感词/脏词开源工具-v.0.10.0-脏词分类标签支持
sensitive-word sensitive-word 基于 DFA 算法实现的高性能敏感词工具. 创作目的 实现一款好用敏感词工具. 基于 DFA 算法实现,目前敏感词库内容收录 6W+(源文件 ...
- 【Unity3D】广告牌特效
1 前言 广告牌特效是指:空间中的一个 2D 对象始终(或尽可能)面向相机,使得用户能够尽可能看清楚该 2D 物体.广告牌特效一共有以下 3 种: 正视广告牌:广告牌始终以正视图姿态面向相机,即广 ...
- 【Unity3D】协同程序
1 简介 1)协程概念 协同程序(Coroutine)简称协程,是伴随主线程一起运行的程序片段,是一个能够暂停执行的函数,用于解决程序并行问题.协程是 C# 中的概念,由于 Unity3D 的 ...
- Swoole从入门到入土(10)——HTTP服务器[初步接触]
讨论完了TCP服务器,接下来的话题就是HTTP服务器.HTTP这个协议"一般"是搭载在TCP协议上实现的. 注意,这里用"一般"是以前多数是这样做的,在&quo ...
- centos7下修改mysql5.5字符集
1.查看现有数据库编码 show variables like "%char%"; 2.修改mysql配置文件:/etc/my.cnf(以实际安装环境为准) 在[client]字段 ...