ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递,以及包管理。它也提供用于获取、编译、编写、和跨计算机运行代码所需的工具和库函数。

随着工业智能化的快速发展,智能机器人设备已成为工业自动化体系的佼佼者,而智能机器人设备核心—ROS系统,是机器人领域的集大成者,主要应用于机器人控制领域,如AGV工业机器人控制器、智能机械臂控制器、机器人导航系统等。
ROS系统主要特点有哪些
(1) 提供丰富的机器人算法库
机器人的各种控制以及通信离不开算法库的支持,ROS系统提供丰富且功能强大的机器人算法库,如坐标变换、运动控制等。机器人开发者可根据开发需要,简单快捷地调用合适的算法库,以提高开发效率,加快开发进程。
(2) 开源免费,架构精简
ROS系统是一个开源免费,架构精简的机器人操作系统。ROS被设计为尽可能精简,以便为ROS编写的代码可与其他机器人软件框架一起使用,如ROS已与OpenRAVE、Orocos和Player集成。正是由于这一特点,探索开发ROS系统的人员众多,遍布世界各地,形成一种“百花齐放,家争鸣”局面,促使ROS功能日益强大。“开源免费、架构精简”这也更是意味着可大大降低产品开发成本,缩短产品开发周期,提高产品开发效率。
(3) 支持实时控制与通信,数据安全可靠
如今ROS系统支持实时控制与通信,并且数据安全可靠。“实时性”、“安全性”是如今工业自动化行业的普遍追求,特别是对于AGV开发,若AGV机器人的主控制器、雷达、摄像头、GPS等部件的控制、通信的实时性与安全性得不到保障,导致的后果将是核心数据泄露、路线控制偏离、系统通信异常等严重后果。而ROS系统凭借其优势,已成为AGV开发利器,广泛应用于各种机器人开发,并逐渐成为主流。
RK3568J + Debian的ROS2系统演示案例
创龙科技SOM-TL3568是一款基于瑞芯微RK3568J/RK3568B2处理器设计的四核ARM Cortex-A55全国产工业核心板,主频高达2.0GHz。核心板CPU、ROM、RAM、电源、晶振、连接器等所有器件均采用国产工业级方案,国产化率100%,并提供国产化率认证报告。
我司RK3568J平台提供的ROS系统启动镜像文件update.img位于产品资料“4-软件资料\Demo\platform-demos\ros2_foxy\bin\”目录下,请先参考《Linux系统启动卡制作及系统固化》文档,将镜像文件update.img通过“瑞芯微创建升级磁盘工具”制作SD启动卡(即ROS系统启动卡),然后将SD启动卡插至评估板Micro SD卡槽。亦可通过SD升级卡或USB固化方式将系统固化至eMMC。
基于Python语言的通信演示
案例功能:基于Python语言,启动ROS节点发布与订阅消息,实现订阅消息节点与发布消息节点之间的实时通信。
请将评估板上电启动,执行如下命令,配置评估板测试环境。
Target#export COLCON_CURRENT_PREFIX=/opt/ros
Target# source /opt/ros/local_setup.sh

执行如下命令,启动ROS节点订阅消息。
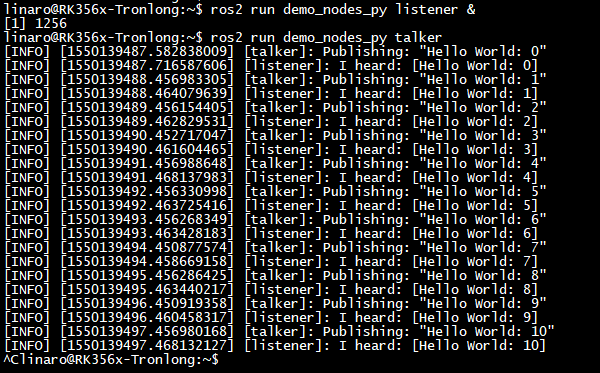
Target# ros2 run demo_nodes_py listener &

执行如下命令,启动ROS节点发布消息,实现订阅消息节点与发布消息节点之间的通信。此时评估板串口调试终端将会打印两节点间通信的信息,如下图所示。按"Ctrl + C"可退出测试程序,即让发布消息的节点退出。
Target# ros2 run demo_nodes_py talker
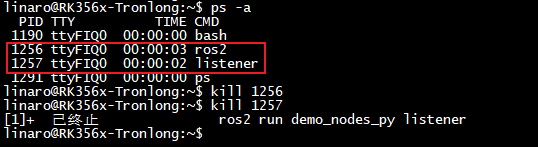
执行如下命令,查看并根据系统进程号关闭所有ROS节点。进程号请以实际情况为准。
Target# ps -a
Target# kill 1256
Target# kill 1257
案例功能:基于C++语言,启动ROS节点发布与订阅消息,实现订阅消息节点与发布消息节点之间的实时通信。
请将评估板上电启动,执行如下命令,配置评估板测试环境。
Target#export COLCON_CURRENT_PREFIX=/opt/ros
Target# source /opt/ros/local_setup.sh

执行如下命令,启动ROS节点订阅消息。
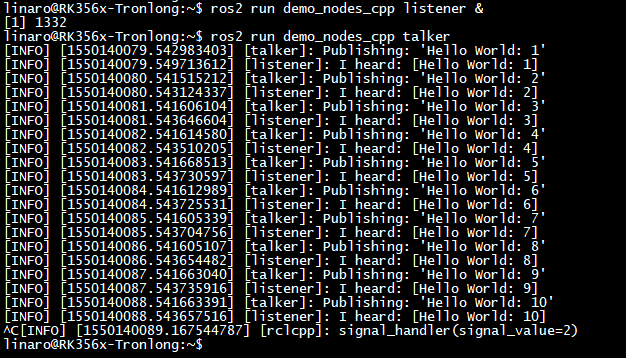
Target# ros2 run demo_nodes_cpp listener &

执行如下命令,启动ROS节点发布消息,实现订阅消息节点与发布消息节点之间的通信。此时评估板串口调试终端将会打印两节点间通信的信息,如下图所示。按"Ctrl + C"可退出测试程序,即让发布消息的节点退出。
Target# ros2 run demo_nodes_cpp talker
执行如下命令,根据系统进程号关闭所有ROS节点。进程号请以实际情况为准。
Target# ps -a
Target# kill 1332
Target# kill 1333

如需完整源码与文档,可与我司技术服务人员联系。如需购买RK3568J工业评估板,请登录创龙科技天猫旗舰店:tronlong.tmall.com!
RK3568J技术QQ群:567208221,欢迎加入!


ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!的更多相关文章
- 让iOS 开发更便捷-JSONConverter
JSONConverter是MAC上iOS开发的辅助小工具,可以快速的把json数据转换生成对应的模型类属性,目前支持Objective-C.Swift以及目前流行的第三方库: SwiftyJSON. ...
- 使开发更便捷——Visual Studio 使用技巧——快捷键
下面是.Net开发中常用的快捷键,熟练使用可以提高开发效率: Ctrl + K + C //注释代码 Ctrl + K + U //取消代码注释 Ctrl + k + d //快速格式化代码 Shif ...
- SpringBoot热启动让开发更便捷
在开发过程中,当写完一个功能我们需要运行应用程序测试,可能这个小功能中存在多个小bug,我们需要改正后重启服务器,这无形之中拖慢了开发的速度增加了开发时间,SpringBoot提供了spring-bo ...
- MyEclipse导航代码第二弹,Java开发更便捷
[MyEclipse CI 2019.4.0安装包下载] 无论是在文件之间导航还是在文件中导航,都可以使用大量导航工具来加快工作流程.目前这些导航工具可在MyEclipse,CodeMix中使用. 单 ...
- 除了ROS, 机器人定位导航还有其他方案吗?
利用ROS进行机器人开发,我想大多数企业是想借助ROS实现机器人的导航.定位与路径规划,它的出现大大降低了机器人领域的开发门槛,开发者无需向前人一样走众多弯路,掌握多种知识才能开始实现机器人设计的梦想 ...
- IIS服务器 远程发布(Web Deploy)配置 VS2010 开发环境 Windows Server 2008服务器系统
原文:IIS服务器 远程发布(Web Deploy)配置 VS2010 开发环境 Windows Server 2008服务器系统 asp.net 网站有三种常用的发布方式:分别是拷贝开发机上发布好的 ...
- ROS机器人开发实践学习笔记3
摘要: 刚刚开始学习ROS,打算入机器人的坑了,参考教材是<ROS及其人开发实践>胡春旭编著 机械工业出版社 华章科技出品.本来以为可以按照书上的步骤一步步来,但是,too young t ...
- ROS机器人开发实践学习笔记2
刚刚开始学习ROS,打算入机器人的坑了,参考教材是<ROS及其人开发实践>胡春旭编著 机械工业出版社 华章科技出品.本来以为可以按照书上的步骤一步步来,但是,too young to si ...
- ROS机器人开发实践学习笔记1
刚刚开始学习ROS,打算入机器人的坑了,参考教材是<ROS及其人开发实践>胡春旭编著 机械工业出版社 华章科技出品.本来以为可以按照书上的步骤一步步来,但是,too young to si ...
- 除了ROS ,机器人自主定位导航还能怎么做?
博客转载自:https://www.leiphone.com/news/201609/10QD7yp7JFV9H9Ni.html 雷锋网(公众号:雷锋网)按:本文作者科技剪刀手,思岚科技技术顾问. 随 ...
随机推荐
- Solution - AGC060B
Link 简要题意:在 \(n \times m\) 的方格表中填入一些不超过 \(2^k-1\) 的数.考虑所有从左上角到右下角的最短路径,要求其中满足路径上数异或和为 \(0\) 的路径只有给定的 ...
- 大模型高效微调详解-从Adpter、PrefixTuning到LoRA
一.背景 目前NLP主流范式是在大量通用数据上进行预训练语言模型训练,然后再针对特定下游任务进行微调,达到领域适应(迁移学习)的目的. 指令微调是预训练语言模型微调的主流范式 其目的是尽量让下游任务的 ...
- 01 Xpath简明教程(十分钟入门)
目录 Xpath简明教程(十分钟入门) Xpath表达式 Xpath节点 节点关系 Xpath基本语法 1) 基本语法使用 2) xpath通配符 3) 多路径匹配 Xpath内建函数 Xpath简明 ...
- nodejs搭建chatgpt服务
5分钟快速搭建基于nodejs的chatgpt服务 写在前面 首先大家都知道,在国内是无法成功调用openapi的接口,甚至openai的官网都很难打开.所以如果想使用chatgpt的几乎是不可能,不 ...
- leaflet利用hotline实现河流差值渲染热力图
实现效果(这里做了1条主河道和5个支流): 核心代码使用了Leaflet.hotline插件,github下载地址链接 详情见我之前整理的一篇文章介绍河流热力图 核心代码逻辑: // 处理河流数据以及 ...
- BMP图片内部结构
BMP图片内部结构 BMP文件的数据按照从文件头开始的先后顺序分为四个部分:分别是位图文件头.位图信息头.调色板(24bit位图是没有的).位图数据(RGB). (1)位图文件头(Bitmap-F ...
- Spring源码阅读 ------------------- SpringFrameWork 5.2 术语理解(三)
一.一定要理解的概念 1.控制反转 对象A和对象B,对象A中需要new 一个对象B,但是,现在需要对象A,不在自己内部new 对象B,把new 对象B的权限交给第三方(IOC框架),操作的过程,就是控 ...
- 各大插件市场智能助手评分榜出炉!百度Comate稳居第一
近日,在VSCode.Jetbrains等各大插件市场智能助手评分榜中,百度Comate分别以4.5和4.4位列第一,通义灵码位居第二.第三,CodeGeeX.iFlyCode.aiXcoder.Gi ...
- WPF 不透明蒙板概述
本文内容 先决条件 使用不透明蒙板创建视觉效果 创建不透明蒙板 将渐变用作不透明蒙板 显示另外 4 个 不透明蒙板能够使部分元素或视觉对象透明或部分透明. 要创建不透明蒙版,请将 Brush 应用于元 ...
- Leetcode-937-Reorder Log Files-(Easy)
一.题目描述 You have an array of logs. Each log is a space delimited string of words. For each log, the ...