玩转X-CTR100 l STM32F4 l 舵机控制

我造轮子,你造车,创客一起造起来!塔克创新资讯【塔克社区 www.xtark.cn 】【塔克博客 www.cnblogs.com/xtark/ 】
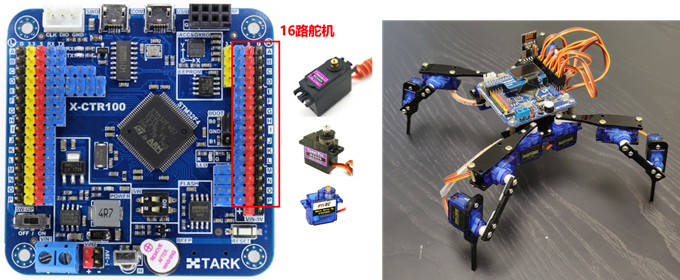
本文介绍X-CTR100控制器的舵机控制,X-CTR100具有16路舵机控制接口,通过定时器产生PWM控制信号,可用于航模、机械臂、机器人等制作。
原理
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前,在高档遥控玩具,如飞机、潜艇模型,遥控机器人中已经得到了普遍应用。
舵机的形状和大小多到让人眼花缭乱,但大致可以如图C所示分类。最右边身材不错的是常见的标准舵机,中间两个小不点是体积最小的微型舵机,左边的魁梧的那个是体积最大的大扭力舵机。它们都是同样的三线控制,因此你可以根据需求换个大个的或小个的。
除了大小和重量,舵机还有两个主要的性能指标:扭力和转速,这两个指标由齿轮组和电机所决定。扭力,通俗讲就是舵机有多大的劲儿。在5V的电压下,标准舵机的扭力是5.5千克/厘米(75盎司/英寸),转速很容易理解,就是指从一个位置转到另一个位置要多长时间。在5V电压下,舵机标准转度是0.2秒移动60度。总之,和我们人一样,舵机的个子越大,转的就越慢但也越有劲儿。
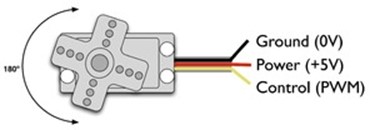
舵机有一个三线的接口。黑色(或棕色)的线是接地线,红线接+5V电压,黄线(或是白色或橙色)接控制信号端。
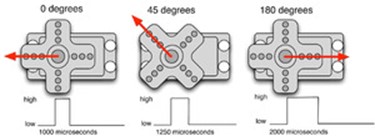
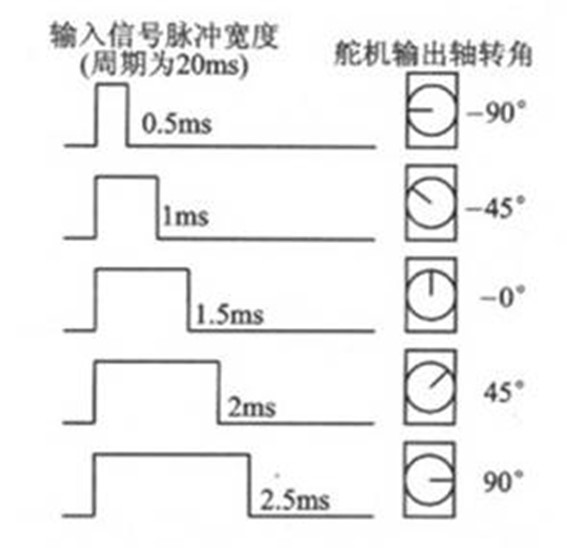
舵机的控制信号周期为20ms的脉宽调制(PWM)信号,其中脉冲宽度从0.5-2.5ms,相对应的舵盘位置为0-180度,呈线性变化。即提供一定的脉宽,它的输出轴就会保持一定对应角度上,无论外界转矩怎么改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应位置。舵机控制脉冲宽度与转角关系如下图。
例程
控制16路舵机30度、90度、150度间隔运动。。
硬件说明
硬件资源:
- 串口UART1
- R扩展接口(16个扩展接口都可以接舵机)
- 舵机若干(需自备)
硬件连接:
软件生态
X-SOFT软件生态,X-API扩展文件如下。
ax_servo.c——X-CTR100 舵机控制源文件
ax_servo.h——X-CTR100 舵机控制头文件
接口函数
|
void AX_SERVO_TIM2_AB_Init(void); //舵机AB接口初始化 void AX_SERVO_TIM2_A_SetAngle(uint16_t angle); //舵机A控制 void AX_SERVO_TIM2_B_SetAngle(uint16_t angle); //舵机B控制
void AX_SERVO_TIM5_CD_Init(void); //舵机CD接口初始化 void AX_SERVO_TIM5_C_SetAngle(uint16_t angle); //舵机C控制 void AX_SERVO_TIM5_D_SetAngle(uint16_t angle); //舵机D控制
void AX_SERVO_TIM3_EFGH_Init(void); //舵机EFGH接口初始化 void AX_SERVO_TIM3_E_SetAngle(uint16_t angle); //舵机E控制 void AX_SERVO_TIM3_F_SetAngle(uint16_t angle); //舵机F控制 void AX_SERVO_TIM3_G_SetAngle(uint16_t angle); //舵机G控制 void AX_SERVO_TIM3_H_SetAngle(uint16_t angle); //舵机H控制
void AX_SERVO_TIM4_IJKL_Init(void); //舵机IJKL接口初始化 void AX_SERVO_TIM4_I_SetAngle(uint16_t angle); //舵机I控制 void AX_SERVO_TIM4_J_SetAngle(uint16_t angle); //舵机J控制 void AX_SERVO_TIM4_K_SetAngle(uint16_t angle); //舵机K控制 void AX_SERVO_TIM4_L_SetAngle(uint16_t angle); //舵机L控制
void AX_SERVO_TIM1_MNOP_Init(void); //舵机MNOP接口初始化 void AX_SERVO_TIM1_M_SetAngle(uint16_t angle); //舵机M控制 void AX_SERVO_TIM1_N_SetAngle(uint16_t angle); //舵机N控制 void AX_SERVO_TIM1_O_SetAngle(uint16_t angle); //舵机O控制 void AX_SERVO_TIM1_P_SetAngle(uint16_t angle); //舵机P控制 |
软件说明
函数AX_SERVO_TIMX_XX_Init()完成舵机控制定时器和IO的初始化,TIMX为对应的定时器,XX为初始化所包含的舵机接口,例如AX_SERVO_TIM3_EFGH_Init()初始化定时器TIM3,包含的接口为EFGH。while循环中通过AX_SERVO_TIMX_X_SetAngle()设置舵机的旋转角度,实现16路舵机30°、90°、150°间隔运动。主程序代码如下。
|
int main(void) { //X-CTR100初始化 AX_Init(115200); printf("***X-CTR100 舵机控制例程***\r\n\r\n");
//模块初始化及配置 AX_SERVO_TIM2_AB_Init(); AX_SERVO_TIM5_CD_Init(); AX_SERVO_TIM3_EFGH_Init(); AX_SERVO_TIM4_IJKL_Init(); AX_SERVO_TIM1_MNOP_Init();
//X-API测试:16路舵机控制测试 printf("*16路舵机控制测试\r\n");
while (1) { printf("*30度...... \r\n"); AX_SERVO_TIM2_A_SetAngle(300); AX_SERVO_TIM2_B_SetAngle(300); AX_SERVO_TIM5_C_SetAngle(300); AX_SERVO_TIM5_D_SetAngle(300); AX_SERVO_TIM3_E_SetAngle(300); AX_SERVO_TIM3_F_SetAngle(300); AX_SERVO_TIM3_G_SetAngle(300); AX_SERVO_TIM3_H_SetAngle(300); AX_SERVO_TIM4_I_SetAngle(300); AX_SERVO_TIM4_J_SetAngle(300); AX_SERVO_TIM4_K_SetAngle(300); AX_SERVO_TIM4_L_SetAngle(300); AX_SERVO_TIM1_M_SetAngle(300); AX_SERVO_TIM1_N_SetAngle(300); AX_SERVO_TIM1_O_SetAngle(300); AX_SERVO_TIM1_P_SetAngle(300); AX_Delayms(1000);
printf("*90度...... \r\n"); AX_SERVO_TIM2_A_SetAngle(900); AX_SERVO_TIM2_B_SetAngle(900); AX_SERVO_TIM5_C_SetAngle(900); AX_SERVO_TIM5_D_SetAngle(900); AX_SERVO_TIM3_E_SetAngle(900); AX_SERVO_TIM3_F_SetAngle(900); AX_SERVO_TIM3_G_SetAngle(900); AX_SERVO_TIM3_H_SetAngle(900); AX_SERVO_TIM4_I_SetAngle(900); AX_SERVO_TIM4_J_SetAngle(900); AX_SERVO_TIM4_K_SetAngle(900); AX_SERVO_TIM4_L_SetAngle(900); AX_SERVO_TIM1_M_SetAngle(900); AX_SERVO_TIM1_N_SetAngle(900); AX_SERVO_TIM1_O_SetAngle(900); AX_SERVO_TIM1_P_SetAngle(900); AX_Delayms(1000);
printf("*150度...... \r\n"); AX_SERVO_TIM2_A_SetAngle(1500); AX_SERVO_TIM2_B_SetAngle(1500); AX_SERVO_TIM5_C_SetAngle(1500); AX_SERVO_TIM5_D_SetAngle(1500); AX_SERVO_TIM3_E_SetAngle(1500); AX_SERVO_TIM3_F_SetAngle(1500); AX_SERVO_TIM3_G_SetAngle(1500); AX_SERVO_TIM3_H_SetAngle(1500); AX_SERVO_TIM4_I_SetAngle(1500); AX_SERVO_TIM4_J_SetAngle(1500); AX_SERVO_TIM4_K_SetAngle(1500); AX_SERVO_TIM4_L_SetAngle(1500); AX_SERVO_TIM1_M_SetAngle(1500); AX_SERVO_TIM1_N_SetAngle(1500); AX_SERVO_TIM1_O_SetAngle(1500); AX_SERVO_TIM1_P_SetAngle(1500); AX_Delayms(1000); } } |
实现效果
可在16路舵机接口中任意一路插入舵机,舵机即可循环30°、90°、150°运动,接口顺序如下图,使用时注意电源供电能力及舵机的功率,一般电脑USB供电(500mA)可为1路GS90舵机提供电源,如果插入多路舵机,或舵机负载扭矩大,也可通过VIN-5V接口供电。

参考
https://m.guokr.com/article/5292/#weixin.qq.com
玩转X-CTR100 l STM32F4 l 舵机控制的更多相关文章
- 玩转X-CTR100 l STM32F4 l 定时器时间测量
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 使用处理器内部硬件定 ...
- 玩转X-CTR100 l STM32F4 l ADC 模拟数字转换
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 AD转换接 ...
- 玩转X-CTR100 l STM32F4 l MPU6050加速度陀螺仪传感器
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 板载加速度 ...
- 玩转X-CTR100 l STM32F4 l X-CTR100与树莓派搭建机器人平台
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器与树莓派Linux系统 ...
- 玩转X-CTR100 l STM32F4 l DRV8825 A4988 步进电机控制
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器控制步进电机 ...
- 玩转X-CTR100 l STM32F4 l 基础例程printf、LED、蜂鸣器、拨码开关、位带操作
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器基础板载资源 ...
- 玩转X-CTR100 l STM32F4 l PS2无线手柄
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] SONY的PS2无线手柄是索尼游戏机的遥控手柄,控制 ...
- 玩转X-CTR100 l STM32F4 l DSP指令集性能测试
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 DSP库的 ...
- 玩转X-CTR100 l STM32F4 l FPU单精度浮点性能测试
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器如何开启ST ...
随机推荐
- Seleniumz中 dr.quit()和dr.close()的区别
/** * dr.quit()和dr.close()都可以退出浏览器,简单的说一下两者的区别:第一个close, * 如果打开了多个页面是关不干净的,它只关闭当前的一个页面.第二个quit, * 是退 ...
- Windows系统下在Eclipse中集成Python
我现在偶尔开发代码,已经不用Eclipse了,主要原因是查看Jar包中的代码反编译十分不便,项目加载的时候卡,偶尔还会崩溃 用Intellij IDEA和PyCharm 原来的笔记如何在Eclipse ...
- 团队作业7—团队项目设计完善&编码测试
一.根据OOD详细设计工作要点,修改完善团队项目系统设计说明书和详细设计说明. <软件设计方案说明书>Github仓库地址:https://github.com/RNTF6/web 完善内 ...
- 浏览器滚动条及其影响 calc()
1.浏览器滚动条 默认风格各异,推荐一插件 mCustomScrollbar 不考虑兼容也可自定义样式 链接二 2.影响 以垂直方向为例,当内容变化的时候,如果设置的是overflow:aut ...
- 算法笔记--数位dp
算法笔记 这个博客写的不错:http://blog.csdn.net/wust_zzwh/article/details/52100392 数位dp的精髓是不同情况下sta变量的设置. 模板: ]; ...
- C#快速生成数据数组
需求:生成一个数组,数组里面的值为1-100实现方式:拿到这个需求很多朋友可能会想到一个快速实现的方式如下: ]; ;i<=;i++){ arr[i]=i; } 但是C#提供了一个快速生成的方式 ...
- 20161212xlVBA工作表数据整理合并单元格
Sub NextSeven_CodeFrame() '应用程序设置 Application.ScreenUpdating = False Application.DisplayAlerts = Fal ...
- 44 CSS 浮动 模态框 定位
一.浮动 float : 浮动的盒子不占原来的位置,其下方的盒子会上移 父盒子会发生塌陷现象.同一级盒子right浮动,同级左边的盒子需要左浮动,right浮动的盒子才能上来 由于浮动框不在文档的普通 ...
- 『cs231n』作业1选讲_通过代码理解KNN&交叉验证&SVM
通过K近邻算法探究numpy向量运算提速 茴香豆的“茴”字有... ... 使用三种计算图片距离的方式实现K近邻算法: 1.最为基础的双循环 2.利用numpy的broadca机制实现单循环 3.利用 ...
- 170301、使用Spring AOP实现MySQL数据库读写分离案例分析
使用Spring AOP实现MySQL数据库读写分离案例分析 原创 2016-12-29 徐刘根 Java后端技术 一.前言 分布式环境下数据库的读写分离策略是解决数据库读写性能瓶颈的一个关键解决方案 ...