目标检测——IoU 计算
Iou 的计算
我们先考虑一维的情况:令 \(A = [x_1,x_2], B = [y_1, y_2]\),若想要 \(A\) 与 \(B\) 有交集,需要满足如下情况:
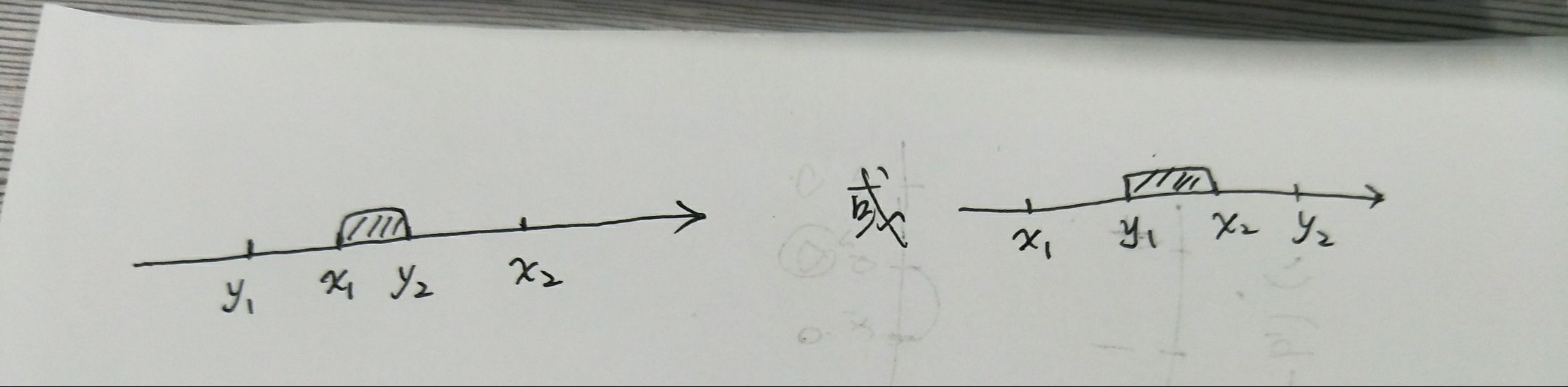
简言之,要保证 \(A\) 和 \(B\) 的最大值中最小的那个减去它们中的最小值中最大的那个即可获得公共部分,代码实现如下:
class Anchor:
def __init__(self, base_size=16):
self.base_size = base_size # 滑动窗口的大小
if not base_size:
raise ValueError("Invalid base_size: {}.".format(base_size))
self._anchor = np.array([1, 1, self.base_size, self.base_size]) - 1
@property
def anchor(self):
return self._anchor
@anchor.setter
def anchor(self, new_anchor):
self._anchor = new_anchor
@property
def w(self):
'''
锚框的宽度
'''
return self.anchor[2] - self.anchor[0] + 1
@property
def h(self):
'''
锚框的高度
'''
return self.anchor[3] - self.anchor[1] + 1
@property
def size(self):
'''
锚框的面积
'''
return self.w * self.h
@property
def _whctrs(self):
"""
Return x center, and y center for an anchor (window). 锚框的中心坐标
"""
x_ctr = self.anchor[0] + 0.5 * (self.w - 1)
y_ctr = self.anchor[1] + 0.5 * (self.h - 1)
return np.array([x_ctr, y_ctr])
@staticmethod
def _coordinate(aspect, ctr):
'''
依据宽高组合计算锚框的坐标
'''
k = (aspect - 1) / 2
return np.concatenate([ctr - k, ctr + k], axis=1)
先创建一个可以用来做运算的计算器,然后在此基础上计算二维的 IoU,即
def iou(anchor, anchor1):
A = Anchor()
B = Anchor()
A.anchor = anchor
B.anchor = anchor1
T = np.stack([A.anchor, B.anchor])
xmin, ymin, xmax, ymax = np.split(T, 4, axis=1)
w = xmax.min() - xmin.max()
h = ymax.min() - ymin.max()
I = w * h
U = A.size + B.size - I
return I / U
下面举一例子,并可视化:
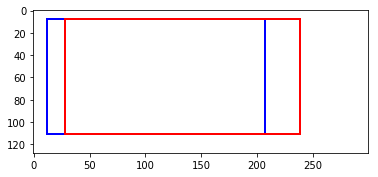
img = np.ones((128 ,300, 3)) # 图片
anchor = [ 12., 8., 195., 103.]
anchor1 = [ 28., 8., 211., 103.]
iou(anchor, anchor1)
最终结果为:
0.8151364126804707
目标检测——IoU 计算的更多相关文章
- 目标检测 IOU(交并比) 理解笔记
交并比(Intersection-over-Union,IoU): 目标检测中使用的一个概念 是产生的候选框(candidate bound)与原标记框(ground truth bound)的交叠率 ...
- CVPR2019目标检测论文看点:并域上的广义交
CVPR2019目标检测论文看点:并域上的广义交 Generalized Intersection over Union Generalized Intersection over Union: A ...
- 目标检测中常提到的IoU和mAP究竟是什么?
看完这篇就懂了. IoU intersect over union,中文:交并比.指目标预测框和真实框的交集和并集的比例. mAP mean average precision.是指每个类别的平均查准 ...
- 评价目标检测(object detection)模型的参数:IOU,AP,mAP
首先我们为什么要使用这些呢? 举个简单的例子,假设我们图像里面只有1个目标,但是定位出来10个框,1个正确的,9个错误的,那么你要按(识别出来的正确的目标/总的正确目标)来算,正确率100%,但是其实 ...
- 目标检测评价标准(mAP, 精准度(Precision), 召回率(Recall), 准确率(Accuracy),交除并(IoU))
1. TP , FP , TN , FN定义 TP(True Positive)是正样本预测为正样本的数量,即与Ground truth区域的IoU>=threshold的预测框 FP(Fals ...
- AAAI 2020 | DIoU和CIoU:IoU在目标检测中的正确打开方式
论文提出了IoU-based的DIoU loss和CIoU loss,以及建议使用DIoU-NMS替换经典的NMS方法,充分地利用IoU的特性进行优化.并且方法能够简单地迁移到现有的算法中带来性能的提 ...
- ECCV 2018 目标检测 | IoU-Net:将IoU的作用发挥到极致
常见的目标检测算法缺少了定位效果的学习,IoU-Net提出IoU predictor.IoU-guided NMS和Optimization-based bounding box refinement ...
- 目标检测中的IOU和CIOU原理讲解以及应用(附测试代码)
上期讲解了目标检测中的三种数据增强的方法,这期我们讲讲目标检测中用来评估对象检测算法的IOU和CIOU的原理应用以及代码实现. 交并比IOU(Intersection over union) 在目标检 ...
- 目标检测性能评价——关于mAP计算的思考
1. 基本要求 从直观理解,一个目标检测网络性能好,主要有以下表现: 把画面中的目标都检测到--漏检少 背景不被检测为目标--误检少 目标类别符合实际--分类准 目标框与物体的边缘贴合度高-- 定位准 ...
随机推荐
- Ball CodeForces - 12D (线段树)
题目链接:https://cn.vjudge.net/problem/CodeForces-12D 题目大意:给你一个人的三个信息,如果存在一个人比当前人的这三个信息都大,那么这个人就会退出,问你最终 ...
- django学习~forms
一 简介 今天咱们来聊聊 django强大的表单功能二 Froms作用 1 自动生成HTML表单元素 2 检查表单数据的合法性 3 如果验证错误,重新显示表单(数据不会重置) 4 数据 ...
- 如何往linux上面上传东西
在linux中rz 和 sz 命令允许开发板与主机通过串口进行传递文件了,下面我们就来简单的介绍一下rz 和 sz 命令的例子. rz,sz是Linux/Unix同Windows进行ZModem文件传 ...
- mysql系列三、mysql开启缓存、设置缓存大小、缓存过期机制
一.开启缓存 mysql 开启查询缓存可以有两种方法来开启一种是使用set命令来进行开启,另一种是直接修改my.ini文件来直接设置都是非常的简单的哦. 开启缓存,设置缓存大小,具体实施如下: 1.修 ...
- python动态函数名的研究
所谓动态函数名,就是使用时完全不知道是叫什么名字,可以由用户输入那种. 一般人习惯性会想到eval或exec, 但是众所周知,这样的写法不安全而且容易引起问题,而且不pythonic.而且使用时必须把 ...
- zabbix添加对自定义无规则的关键日志文件的监控
zabbix添加对自定义无规则日志文件的监控 项目背景及思路: zabbix自带有针对日志文件的监控,自带的监控只能监控到指定文件或者正则匹配的固定日志文件,但当需要监控的文件名没有规律的时候自带监控 ...
- zabbix3.0.4-agent通过shell脚本获取mysql数据库登陆用户
zabbix3.0.4获取数据库登陆用户趋势详解 主要思路: 通过zabbix客户端shell脚本mysql命令取出用户表中的数据将结果反馈给zabbix,画出趋势图 1.修改zabbix-agent ...
- IntelliJ IDEA配置Tomcat 与安装Tomcat失败原因
1.jdk中jre损坏,无法提供运行环境:重新下载jre安装并配置
- 关卡得分(if 嵌套for)与(for嵌套if)
- ORACLE与SQLSERVER数据转换
前言: 将SQLServer数据库中的表和数据全量导入到Oracle数据库,通过Microsoft SqlServer Management Studio工具,直接导入到oracle数据库,免去了生成 ...